|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина І АЕРОГІДРОГАЗОДИНАМІКА Електронний посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. АЕРОДИНАМІЧНІ ХАРАКТЕРИСТИКИ ПРОФІЛЮ
КРИЛА І НЕСУЧОГО ГВИНТА ВЕРТОЛЬОТА. АЕРОДИНАМІКА
ГІПЕРЗВУКОВИХ ПОТОКІВ І РОЗРІДЖЕНИХ ГАЗІВ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Основні відомості про несучий
гвинт вертольота: призначення, класифікація і його основні елементи Несучий гвинт є основним конструктивним елементом
вертольота, який аналогічно крилу створює підйомну силу, рушійну (пропульсивну) силу – аналогічно тязі
двигунів і керуючі моменти – аналогічно механізації крила і керуючих
поверхонь хвостового оперіння літака. Види, класифікація та основні
конструктивні елементи несучого гвинта вертольоту
– з
механічним приводом від поршневих двигунів через муфту зчеплення; – з
газодинамічними приводом від турбогвинтових двигунів через вільну турбіну; – з
реактивним приводом від реактивних двигунів, встановлених на кінцях лопатей НГ. НГ складається з лопатей,
закріплених на втулці, посадженої на вал головного редуктора вертольота.
Лопаті до втулки НГ кріпляться за допомогою шарнірів або пружних
елементів.
– з шорстким кріпленням лопатей; – з пружним кріпленням лопатей; – з шарнірним кріпленням лопатей.
–
обертаються навколо осі НГ; – переміщаються
разом з вертольотом в просторі; –
змінюють своє кутове положення щодо вертикальних і горизонтальних шарнірів (здійснюють махові і коливальні рухи).
– вісь ГШ знаходиться в площині
обертання НГ і дозволяє лопаті здійснювати коливальні махові
рухи у вертикальній площині (βл); – вісь ВШ розташована паралельно осі
обертання НГ і дозволяє здійснювати коливальний рухи в площині
обертання НГ (ξл); – вісь осьового шарніру (вісь Ш, ОШ) знаходиться в поздовжній площині лопатей НГ і дозволяє змінювати кути установки перерізів лопатей під
час керування НГ (φл). Віссю симетрії НГ є вісь валу головного редуктора. Площина,
перпендикулярна осі обертання НГ, що проходить через центр втулки НГ, називається площиною обертання. Несучий гвинт (НГ) характеризується певною сукупністю геометричних і
кінематичних характеристик і параметрів. Геометричні і кінематичні
характеристики та параметри НГ Геометричні характеристики НГ До геометричних характеристик НГ відносять величини, що
визначають лінійні розміри лопатей і в цілому НГ. Вони, за інших рівних умов,
істотно впливають на аеродинаміку НГ. Основні геометричні розміри НГ наводяться за нульових значень кутів змаху (βл) і коливання лопатей (ξл).
–
діаметр НГ (DнГ); – площа
обмаху НГ (FнГ); – питоме
навантаження на НГ (р); –
коефіцієнт заповнення НГ (σнГ); – рознесення
горизонтального і вертикального шарнірів втулки НГ – lгш, lвш. 1)
Діаметр НГ
(DнГ) – це діаметр кола, по якому рухаються кінці лопатей
під час обертання НГ без їх переміщення
в горизонтальній і вертикальній площинах (рис. 185): У сучасних вертольотів діаметр НГ D = 13 – 35 м, відносний радіус перерізу лопаті
позначається
2)
Площа обмаху (FнГ) – це площа кола, який описують під час обертання НГ кінці лопатей без урахування махових рухів лопатей:
Площа обмаху НГ аналогічна площі крила літака. 3)
Питоме
навантаження на НГ
(р) – відношення маси вертольота до площі обмаху НГ:
Кількість лопатей сучасних вертольотів дорівнює z = 2 – 8 лопатей, їх
кількість залежить від маси вертольота і діаметра НГ. 4) Коефіцієнт заповнення (σнГ) – характеризує ступінь заповнення лопатями площі обмаху
НГ і дорівнює відношенню сумарної площі всіх лопатей до площі обмаху:
5) Рознесення шарнірів: (горизонтального
У сучасних вітчизняних вертольотів:
Визначити площу обмаху НГ вертольота Мі-8, питоме навантаження і
коефіцієнт заповнення, якщо діаметр НГ – 21,3 м, маса вертольота – 12000 кГс, кількість лопатей – 5, хорда лопаті складає 580 мм. Кінематичні параметри НГ
–
частоту обертання НГ (ωнГ); – кут
атаки (αнГ); – кути
загального і циклічного кроку НГ (φ0 і φцш). 1) Частота обертання НГ(ωнГ) – кількість обертань радіан в секунду. У
аеродинаміці вертольота зазвичай розглядають не
частоту обертання, а кількість обертів НГ за секунду (nc):
У сучасних вертольотів U
= 180 – 220 м/c, М = 0,5
... 0,7. На приладовій дошці пілота покажчик оборотів НГ показує частоту обертання НГ у відсотках від номінального
значення оборотів НГ. 2) Кут атаки НГ (αнГ) – це кут між вектором швидкості набігаючого потоку
і площиною обертання НГ. Кут атаки вважається позитивним, якщо незбурений
повітряний потік набігає на площину НГ знизу (рис. 186). 3)
Кут загального кроку (φ0) – кут установки перерізів усіх лопатей НГ в перерізі на характерному
радіусі (0,7R).
4)
Кут циклічного кроку НГ(φцш) – кут установки лопатей НГ у
відповідних
азимутах. Азимутальний кут (ψ
= 00) за відсутності вітру перебуває над
хвостовою балкою
і відлік здійснюється за годинниковою стрілкою, за виглядом зверху, в
послідовності ψ = 00 –
900 – 1800 – 2700 – 3600. Аеродинамічні характеристики НГ зазвичай розглядаються в
зв'язаній системі координат oxyz.
Початок координат роміщається в центрі втулки НГ на осі обертання, поздовжня
вісь оx спрямована вперед в
площині обертання НГ, нормальна вісь oy спрямована вгору по осі обертання НГ, поперечна вісь oz
спрямована вправо, перпендикулярно площині xoy. Всі вітчизняні вертольоти одногвинтової схеми мають НГ лівого обертання (НГ обертається за годинниковою
стрілкою за виглядом зверху).
На режимах горизонтального польоту використовують безрозмірну характеристику режиму
роботи НГ (μ):
1) Визначити частоту обертання, колову швидкість обертання
кінця лопаті НГ і число Маха,
якщо число обертання НГ вертольота Мі-24
248 об/хв, діаметр НГ – 17,4 м, висота польоту вертольота
складає 1000 м. 2) Визначити колову швидкість кінця лопаті НГ, коефіцієнт протікання і характеристику режиму роботи НГ вертольота Мі-2,
якщо частота обертання 26 1/с,
діаметр НГ – 14,5 м,
швидкість горизонтального польоту вертольота – 210 км/год, кут атаки НГ – 50, індуктивна швидкість відкидання маси
повітря – 10 м/с. Геометричні і кінематичні параметри лопатей НГ
– радіус НГ (довжина лопаті) – R; – хорду
лопаті – bл; – кут
установки – φл; – форму
перерізів профілю лопаті; –
геометричну крутку лопаті; – форму
лопаті в плані. Поточний радіус перерізу лопаті (ri) визначає
відстань від осі обертання НГ до розглянутого перерізу по розмаху лопаті. Хорда профілю лопаті – bл. Кут установки лопаті (φл) вимірюється між хордою лопаті і площиною обертання НГ (рис. 187).
Форма перерізів профілю лопаті характеризується
максимальною товщиною (Смакс),
максимальної кривизною (fмакс) і радіусом заокруглення носика профілю (r0). На вибір форми
вертольотних профілів лопатей НГ істотно впливають конструктивні обмеження щодо
розміщення всередині контуру профілю лонжерона, протифлатерних грузиків,
систем сигналізації пошкодження лонжерона, протиобмерзальної системи і
хвостового стрінгера. Геометрична крутка здійснюється зміною кутів
установки перерізів по розмаху лопаті, тобто конструктивним поворотом перерізів
лопаті відносно один одного на кут
– кут
азимутального положення (ψл); – кут змаху (βл); – кут коливання (ξл); –
швидкість обтікання лопаті незбуреним повітряним потоком (V∞); – кут
атаки лопаті (αл). Кут азимутального положення (ψл) змінюється у напрямку обертання НГ між поздовжньою віссю лопаті і проєкцією вектора швидкості
польоту на площину обертання НГ. Кут азимутального положення (ψл) за відсутності вітру
відраховується від положення лопаті над хвостовою балкою і за годинниковою
стрілкою. Лопать називається наступаючою, якщо
Кут змаху лопаті (βл) характеризує вертикальне
кутове переміщення лопаті відносно ГШ щодо площини обертання і вважається позитивним за відхилення
лопаті вгору відносно площини обертання (рис. 189).
Кут коливання (ξл) лопаті характеризує кутове переміщення
лопаті відносно ВШ в площині обертання і вважається позитивним за
відхилення лопаті проти напрямку обертання. З огляду на відносно малі відстані від центру втулки НГ до ГШ і ВШ в порівнянні з радіусом R лопаті допускається приймати відносні відстані
Результуючу швидкість
обтікання перерізів лопаті (U) зазвичай визначають через горизонтальну
і вертикальну складові: Горизонтальна нормальна складова швидкості (Ux) обтікання
перерізу спрямована перпендикулярно до осі лопаті і розташована в площині,
паралельній площині обертання:
Горизонтальна (дотична)
тангенціальна складова швидкості (Uz)
обтікання перерізу лопаті спрямована увздовж лопаті:
Вертикальна складова швидкості (Uy) обтікання
перерізу спрямована перпендикулярно до осі лопаті і розташована в площині
змаху:
Геометрична сума компонентів Ux, Uy, Uz визначає
результуючу швидкість обтікання: Кут атаки перерізу лопаті дорівнює (рис. 191 і 192):
1) Визначити результуючу швидкість обтікання перерізів
лопатей і її складові, якщо частота обертання 59,1 1/с, швидкість горизонтального польоту
вертольота АК1-3 150 км/год, азимут лопаті 900, кут атаки НГ
50, в перерізі
поточного радіусу лопаті 150 см
кут змаху лопаті 30,
а швидкість зміни кута змаху – 0,08
1/с, індуктивна швидкість відкидання маси повітря – 6 м/с. 2) Визначити характеристику режиму роботи НГ вертольота Мі-24
під час горизонтального польоту і геометричну крутку лопатей НГ на поточному радіусі 8
м, якщо швидкість горизонтального польоту 240 км/год, кут атаки НГ – 50, обороти НГ 248 об/хв,
кут установки лопаті біля комеля – 70,
погонна зміна кута установки по радіусу лопаті 0,5 град/м, індуктивна швидкість відкидання маси повітря
10 м/с, діаметр НГ – 17,4 м. 3) Визначити горизонтальну і вертикальну складові швидкості
обтікання перерізів лопатей НГ вертольота АК1-3,
а також кут атаки перерізу лопаті на радіусі 4000 см, якщо швидкість горизонтального польоту 150 км/год, кількість
обертання НГ – 565 об/хв, кут атаки НГ – 50 в азимуті лопаті 1800, індуктивна швидкість відкидання маси
повітря – 6 м/с, кут змаху
лопаті – 60, швидкість
кута в змаху лопаті – 0,11/с,
кут установки в перерізі – 50. Основні режими роботи НГ вертольота Несучий гвинт вертольота призначений для створення результуючої
аеродинамічної сили (тяги) необхідної для забезпечення керованого польоту,
поздовжньо-поперечної стійкості і керованості вертольота. Основними режимами роботи НГ є: Режим
висіння і вертикального переміщення вертольота На цих
режимах лопаті НГ обтікаються
повітряним потоком, швидкості якого у всіх азимутах лопатей однакові і рівні
окружній
швидкості НГ: (
Режим горизонтального польоту вертольота На режимах горизонтального польоту результуюча швидкість
повітряного потоку лопаті НГ в кожному перерізі визначається як сума колової
швидкості перерізу лопатей (U) і швидкості набігаючого незбуреного потоку ( Колова швидкість має постійне значення в певному перерізі в
усіх азимутальних положеннях лопаті, а поступальна швидкість в кожному
азимуті має різні напрямки щодо носової частини профілю лопаті, тобто за
поступального руху вертольота підйомна сила і лобовий опір лопаті неперервно
змінюються за період одного оберту від максимального до мінімального
значення. Внаслідок різної підйомної сили лопатей в азимутах 900 і 2700 виникає перекидний
момент, а періодична зміна сил і моментів на лопатях призводить до виникнення
вібрацій і тряски вертольота. Для зменшення впливу періодичної зміни підйомної сили у
вузлах кріплення лопаті до втулки НГ встановлені ГШ, для зменшення впливу зміни
сил лобового опору лопаті НГ встановлені ВШ. Шарніри дають можливість
лопаті здійснювати вільні махові рухи відносно цих шарнірів: – відносно ГШ – у вертикальній площині; – відносно ВШ – в горизонтальній площині. Махові рухи лопатей зменшують нерівномірність дії
аеродинамічних сил під час поступального горизонтального руху вертольота,
зменшують результуючі навантаження на деталі втулки НГ, покращують стійкість вертольота. Для забезпечення можливості зміни кутів установки лопатей
на втулці НГ встановлені осьові шарніри. На лопать НГ у вертикальній площині діють підйомна сила і маса
лопаті, а в горизонтальній площині діють відцентрова сила і сила лобового
опору. За поступального руху вертольота на НГ виділяють три характерні зони, які обмежують нормальні
умови обтікання лопаті і виникнення підйомної сили, що обмежує льотні
можливості вертольота (рис. 194): – в
азимуті
– в азимуті – в азимуті Критичні режими обтікання
лопатей несучого гвинта вертольота Поняття про критичні явища при обтіканні лопатей НГ На сучасному етапі розвитку вертольотобудування можливі
досягнення граничних значень швидкостей польоту і високих маневрених
характеристик, які обмежені розвитком критичних явищ, що виникають на лопатях
НГ, а саме: – проявом ефекту стисливості повітря на кінцевих ділянках
наступаючої лопаті в азимуті ѱ = 900, який характеризується
навколо-звуковими обтіканнями кінцевих перерізів лопаті і розвитком «хвильової кризи»; – виникненням «зони
зворотного обтікання» і зривом потоку на відступаючій лопаті в азимутах ѱ = (2300 – 3000) на площі обмаху НГ. Особливості руху лопатей НГ по азимутах і їх взаємодія з
набігаючим повітряним потоком приводять до утворення трьох характерних
критичних зон (рис. 195).
Характеристика зон критичних режимів обтікання НГ Зона 1 – де швидкість обтікання кінцевих перерізів
наступаючої лопаті в азимуті ѱ = 900 досягає швидкості звуку і
отже, в цих перерізах виникає хвильова криза. Сумарний лобовий опір
лопатей різко зростає за рахунок появи хвильового опору, що викликає
підвищену тряску лопатей і обмежує частоту обертання НГ. Зона 2 – в якій через махові рухи лопатей вниз в азимуті ѱ = 2700 відбувається збільшення кутів атаки кінцевих
перерізів відступаючої лопаті. При цьому дійсні величини кутів атаки можуть
перевищувати значення критичного кута атаки профілю лопаті. Зрив, що виникає
при цьому на верхній поверхні профілю лопаті, різко знижує тягу і збільшує
опір лопаті НГ, що обмежує максимальну швидкість горизонтального
польоту. Зона 3 – в якій в результаті складання колової швидкості
лопатей НГ і поступальної швидкості вертольота, в кореневих
перерізах відступаючої лопаті НГ в азимуті ѱ = 2700 спостерігається обтікання
профілю лопаті з хвостової частини. При цьому утворюється зрив потоку,
внаслідок чого підйомна сила цих перерізів лопаті різко зменшується, а опір
збільшується. Розміри «зони зворотного обтікання» збільшуються зі
збільшенням поступальної швидкості польоту або зі зменшенням кутової
швидкості обертання НГ, що обмежує максимальну швидкість горизонтального
польоту. Таким чином, наявність зон
критичних режимів обтікання лопатей НГ істотно обмежує швидкість польоту і
частоту обертання НГ вертольота. Шляхи зниження впливу критичних режимів обтікання НГ на
ефективність його роботи. Для збільшення швидкості польоту сучасних вертольотів і
усунення шкідливих наслідків від хвильового опору на наступаючій лопаті НГ застосовуються різні види конструктивних рішень: –
застосування надзвукових профілів на кінцевих перерізах лопаті НГ, що мають велике значення
критичного числа Маха і оптимальні моментні характеристики на навколозвукових
колових швидкостях лопатей НГ; –
використання аеродинамічних профілів змінної відносної товщини по довжині
лопаті (аеродинамічна крутка); –
установка на лопатях НГ закінцівок різної
геометричної форми в плані. Зменшення «зони зворотного обтікання» можливе застосуванням
високонесучих профілів з відносною товщиною профілю С = 0,14 – 0,18, що мають високі значення критичних кутів атаки
в діапазоні чисел Маха (М = 0,3 –
0,5). Таким чином, під час проєктування НГ сучасних вертольотів конструктори змушені приймати
компромісні рішення, обираючи частоту обертання НГ: – з одного боку, зменшувати частоту обертання НГ, що дозволить зменшити число Маха на кінцях лопатей в
азимуті 900, а
отже, зменшити хвильовий опір; – з іншого боку, збільшувати частоту обертання НГ, що дозволить зменшити «зону зворотного обтікання» на НГ в азимуті 2700. Найбільший інтерес викликає дослідження з вибору
оптимального набору профілів і крутки по радіусу лопаті НГ, а також раціональної геометрії її кінцевої частини, за
рахунок якої можливо істотно поліпшити аеродинамічні характеристики НГ. У роботах Ю. М. Ігнаткіна і С. Г. Константинова наведені
результати розрахунків впливу геометрії кінцевої частини лопаті НГ на їх аеродинамічні характеристики. Всі розрахункові
моделі лопаті складаються з прямокутного в плані відсіку і прилеглих до нього
закінцівок різної геометричної форми: прямокутної, трапецієподібної,
стрілоподібної і гіперболічної (рис. 196).
Результати розрахунку аеродинамічних характеристик кінцівок
при кутах атаки α = -2 – 240,
зокрема, при числах Рейнольдса Re =
3,15×105 і числі Маха М
= 0,9 представлена на рис. 197 – 199. З представлених графіків (рис. 197 – 199) випливає,
що кінцівка прямокутної форми № 1
має найменше значення коефіцієнта підйомної сили і найбільший опір.
Трапецієподібна форма № 2 має
більше значення коефіцієнта підйомної сили і менший опір в порівнянні з
прямокутною кінцівкою, що обумовлено її звуженням і великим подовженням. Стрілоподібна кінцівка №
3 має менший опір в порівнянні з трапецієподібною закінцівкою, що
обумовлено не тільки фактором звуження, а й стрілоподібністю по передньому
краю. Найменший опір має гіперболічна кінцівка № 4.
На рис. 200 представлені результати зміни
коефіцієнтів опору кінцівок від числа Маха Cxa = f (M) при Cya = 0 в діапазоні чисел Маха M = 0,5 – 1,1.
З наведених графіків випливає, що на кінцівках прямокутної
і трапецієподібної форм у плані критичне число Маха Mкр = 0,75. Збільшення кута стрілоподібних
закінцівок по передньому краю дозволяє збільшити критичне число Маха до Mкр = 0,85. Результати проведених досліджень показали, що застосування
стрілоподібних і гіперболічних закінцівок на лопатях НГ дозволяють на великих швидкостях польоту зменшити
хвильовий опір на кінцях наступаючих лопатей і зменшити енергетичні витрати
на привод несучого гвинта вертольоту. Загальні поняття про
імпульсну і вихрову теорії розрахунку тяги Імпульсна теорія розрахунку НГ була розроблена в 1910 – 1913
рр. М. Є. Жуковським і потім розвинена і застосована на практиці його учнями
Б. М. Юр'євим і Г. Х. Собяніним. Відповідно до цієї теорії аеродинамічні сили, що діють на
несучий гвинт, і споживана ним потужність визначаються на основі застосування
загальних теорем механіки до повітряного потоку, що обтікає несучий гвинт. В основі теорії лежить поняття «ідеального гвинта», сила тяги якого рівномірно розподілена по площині обертання НГ. Повітря вважається ідеальною рідиною і при цьому
допускається, що струмінь, створюваний несучим гвинтом, не змішується з
навколишнім повітрям, а витрати потужності на тертя лопатей об повітря,
завихрення і закручування струменя відсутні. Ідеальний гвинт розглядається як активний диск, що
складається з нескінченної кількості лопатей і взаємодіючий з оточуючим його
повітрям. Фізична сутність теорії полягає в тому, що обертаючись, ідеальний
гвинт відкидає повітря з певною швидкістю за межі площини обертання НГ. На місце
відкинутого повітря з навколишнього повітряного середовища підсмоктується
нова незбурена маса повітря. Таким чином, перед НГ утворюється зона розрідження (підсмоктування), а
за НГ – зона підтискування (відкидання), що призводить
до утворення повітряного потоку, який протікає через площину НГ. Основними
кінематичними параметрами повітряного потоку є: –
швидкість повітряного потоку; – зміна
тиску в площині обертання і в струмені НГ. Швидкість повітряного потоку, створювана НГ в
площині обертання гвинта, називається індуктивною швидкістю (vi). При
цьому вводиться обмеження, що індуктивна швидкість по всій поверхні площини
обертання НГ вважається умовно постійною. Несучий гвинт, підсосуючи і
відкидаючи повітря, змінює його кількість руху і кінетичну енергію, а сила
реакції повітряного струменя є силою тяги НГ. Поняття про вихрову теорію розрахунку тяги НГ Вихрова теорія була створена М. Є. Жуковським в 1912 – 1918
рр. Вагомий внесок у розвиток теорії внесли учні Жуковського, вчені В. Е.
Баскін, С. М. Білоцерківський, Л. С. Вільдгрубе, Е. С. Вождаєв, Г. І.
Майкапар, М. Н. Тищенко, В. І. Шайдаков, Б. Н. Локтєв та інші. Згідно з вихровою теорією кожна лопать НГ моделюється вихровою системою, що складається з приєднаних
(підковоподібних) вихорів і вільних вихорів, що утворюють за лопатою вихровий
слід (рис. 201). На підставі теореми Стокса приєднані вихори мають таку ж
циркуляцію швидкості по замкнутому контуру, як і реальна несуча поверхня, що
обтікається повітряним потоком і знаходиться під певним кутом атаки до
набігаючого повітряного потоку.
Зміна циркуляції приєднаних вихорів по радіусу лопаті
супроводжується утворенням поздовжніх вихорів, які моделюють вихрову пелену.
У польоті сходять з лопатей вільні вихори і йдуть від НГ вниз і назад з різними швидкостями і таким чином
утворюється складна за формою вихрова пелена, яка сходить з лопатей НГ і сильно деформується під впливом вільних вихорів. На деякій відстані від лопатей вся вільна вихрова пелена
згортається в один вихровий шнур. Циркуляція сходить з кінців лопатей вихровими
шнурами прямо пропорційна навантаженню на площину обертання і обернено
пропорційна числу лопатей і частоті обертання НГ (рис. 202). На режимах осьового обтікання вихрова пелена від НГ поширюється вниз у вигляді колонки вихрових шнурів
спіралеподібної форми, які ніби намотані на бічну поверхню циліндра (рис.
202, а). При переході з режиму осьового обтікання до режиму косого
обтікання НГ вихрова пелена скошується і відхиляється назад у
напрямку вектора швидкості потоку, що набігає. Всередині вихрової колонки,
поблизу її осі, зосереджуються вихрові шнури, що сходять з кореневих
перерізів лопатей, циркуляція яких протилежна, за обертанням, кінцевим
вихровим шнурам (рис. 202, б). Вихрова теорія НГ дозволяє вирішити дві основні аеродинамічні задачі НГ вертольота: – розраховувати поле індуктивних швидкостей, створюваних
лопатями НГ в площині його обертання і в навколишньому
незбуреному просторі; – визначати індуктивний взаємовплив лопатей НГ і вплив НГ на лопаті РГ.
Визначення кінематичних параметрів і тяги НГ на різних
режимах роботи НГ На
режимі висіння повітря підсмоктується НГ з усіх боків навколишнього середовища, а під
несучим гвинтом утворюється стійкий повітряний потік (рис. 203). Розглянемо
три характерних перерізи повітряного потоку, що створюється НГ: – перед НГ переріз «0-0»; – в
площині обертання НГ, перерізах «1-1» і «2-2»; – за НГ переріз «3-3». Швидкість
протікання повітря до перерізу «0-0» дуже мала,
а між перерізами «1-1» і «2-2» в
площині обертання НГ виникає індуктивна швидкість підсмоктування
повітря. На підставі другого закону механіки, зміна кількості руху повітря
Сила
тяги НГ, прикладена до повітря, розганяє його до індуктивної
швидкості
Якщо
підставити у вираз замість маси її складові, то отримаємо:
Так як
виконана робота викликає зміну кінетичної енергії, що проходить через НГ потоку повітря Таким
чином, на величину тяги НГ впливає індуктивна швидкість і її можна визначити
за формулою:
Фізична
сутність рівняння:
індуктивна швидкість відкидання несучим гвинтом повітря в перерізі «3-3» в 2 рази більше індуктивної швидкості
підсмоктування його в площині обертання НГ в перерізі «1-1».
Практично подвоєння індуктивної швидкості відбувається на відстані під
площиною обертання НГ рівній його радіусу (R). Визначимо
перепад тиску в повітряному струмені по перерізах «0-0», «1-1», «2-2» і «3-3»,
введемо деякі обмеження і допущення: – тиск
повітря в розглянутому об'ємі дорівнює атмосферному; –
швидкість повітря перед гвинтом дорівнює «0». Запишемо
рівняння Бернуллі по перерізах:
Віднімаючи
з 2-го рівняння 1-е, отримаємо величину
перепаду тиску:
Таким
чином, повний перепад тиску на НГ дорівнює чотирьом швидкісним напорам
індуктивної швидкості в площині обертання НГ. У
порівнянні з атмосферним тиском незбуреного середовища перепад тиску на НГ становить:
Таким
чином, надлишковий тиск за НГ на режимі висіння дорівнює трьом швидкісним
напорам індуктивної швидкості в площині обертання НГ. З
формули тяги НГ можна визначити величину індуктивної швидкості:
Таким
чином, за збільшення маси вертольота, зберігаючи незмінною площину обертання
НГ ( Так, у
вітчизняних вертольотів індуктивна швидкість за типами вертольотів становить:
Тому з
огляду на співвідношення, що Режим осьового обтікання за вертикальних переміщень На цих
режимах має місце переміщення повітряного потоку вздовж осі обертання НГ вгору або вниз, тобто виникає вертикальна швидкість
повітряного потоку У
порівнянні з режимом висіння швидкість і кількість руху повітря, що проходить
через НГ, змінюються, і тому формула роботи НГ має вигляд:
Закономірность Секундна
маса повітря, що протікає через НГ, дорівнює: Замінимо
тягу НГ питомим навантаженням (p) і після перетворення отримаємо рівняння для визначення величини
індуктивної швидкості на режимах вертикального переміщення. Так як рівняння
індуктивної швидкості буде квадратичним, то корінь вирішення цього рівняння
рівняється:
Розглянемо
фізичну сутність зміни індуктивної швидкості потоку на режимах вертикального
осьового переміщення НГ. На режимі вертикального підйому вертольота індуктивна швидкість потоку зменшується, а
на режимах вертикального зниження – збільшується. Фізична
сутність процесів вертикальних переміщень НГ: 1) За
вертикального підйому НГ секундна маса повітря, що проходить через НГ вертольота, зростає, тому для створення потрібної
сили тяги НГ потрібна менша робота прокачування повітря через НГ, тобто індуктивна швидкість потоку νi зменшується. 2) За
вертикального зниження НГ, повітряний струмінь, що відкидається НГ, спрямований назустріч набігаючого повітряному
потоку знизу, що вимагає виконання додаткової роботи на прокачування через НГ маси повітря, а отже – збільшення індуктивної швидкості потоку νi. Збільшення питомого навантаження на площу обмаху (р) викликає відповідне збільшення індуктивної
швидкості νi. Режими роботи НГ за
вертикального зниження умовно поділяють на три окремі види: 1.
За вертикального зниження НГ на режимі зі швидкістю 2.
За вертикального зниження НГ на режимах зі швидкістю 3.
За вертикального зниження НГ на режимах зі швидкістю Під час
зниження вертольота з працюючими двигунами з малою поступальною швидкістю і
великою вертикальною швидкістю (рівній індуктивній швидкості відкидання) під НГ зустрічаються два потоки – індуктивний потік зверху
і потік, що набігає знизу. На деякій відстані від НГ утворюється поверхня розділу (рис. 204 – 206), в
якій ці швидкості зрівнюються, а загальна швидкість дорівнює нулю. При
збільшенні вертикальної швидкості ця поверхня розділу наближається до НГ. В цьому
випадку теорема про кількість руху протікаючого через НГ повітря не працює. Вертоліт
як би провалюється в повітряну яму, зниження стає некерованим і настає режим вихрового кільця, при якому
маса повітряного струменя за НГ включається у вихровий рух, перетікає через кінці
лопатей з-під площини обертання НГ на її верхню поверхню і потім знову засмоктується НГ.
Такий
режим може мати місце за вертикальної швидкості зниження
Режим косого обтікання НГ Режим
косого обтікання характеризується тим, що повітряний потік набігає на НГ під деяким кутом до осі його обертання. НГ
створює повітряний потік, орієнтований за вектором швидкості набігаючого
незбуреного потоку (рис. 207).
Секундна
маса повітря, що протікає через НГ, дорівнює:
Швидкість повітряного потоку за косого обтікання
Введемо
припущення:
Згідно з
теоремою про кількість руху запишемо:
Зміна кінетичної
енергії маси повітря в перерізі струменя рівняється:
При
цьому НГ для створення необхідної тяги виконує роботу:
Підставивши
рівняння роботи в рівняння кінетичної енергії і виконавши необхідні
перетворення, отримаємо:
Після
виконання відповідних перетворень отримаємо рівняння для визначення тяги НГ на режимі косого обтікання
звідси
індуктивна швидкість дорівнює:
З
формули випливає, що за збільшення швидкості польоту індуктивна швидкість
зменшується, так як скорочується час взаємодії НГ з заданим об'ємом повітря, що прокачується через нього (рис. 208).
Практичний
інтерес має політ вертольота з горизонтальною швидкістю, що набагато
перевищує індуктивну швидкість
Таким чином,
подвоєння індуктивної швидкості в площині обертання під НГ є основою
імпульсної теорії створення тяги НГ для всіх режимів обтікання. Визначення індуктивних
швидкостей за вихровою теорією Методи і види вихрової теорії Існує
кілька методичних підходів до розрахунку поля індуктивних швидкостей,
створюваних лопатями НГ за вихровою теорією. Лопасна
вихрова теорія Відповідно
до цієї теорії кожна лопать розглядається окремо від інших і характеризується
своєю індивідуальною вихровою системою, що є сукупністю приєднаних
підковоподібних вихорів, що моделюють лопать, і вільної вихрової пелени. Дискова
вихрова теорія Відповідно
до цієї теорії лопаті НГ замінюються активним диском із загальною для всього
несучого гвинта вихровою системою. При цьому
кожна вихрова теорія може бути: - нелінійною; -
квазілінійною; -
лінійною.
У цій теорії форма вільної вихрової пелени, розподіл на ній
циркуляції і поле індуктивних швидкостей визначаються за одночасного
спільного розв'язування задачі з розрахунком підйомної сили лопаті. Нелінійна вихрова теорія найбільш універсальна і
застосовується під час розрахунку поля індуктивних швидкостей на малих
швидкостях польоту і на перехідних режимах польоту вертольота за допомогою ЕОМ.
У цій теорії впливом індуктивних швидкостей на рух вільних
вихорів нехтують, тобто вважається, що вільна вихрова пелена зноситься від НГ з постійною швидкістю, яка дорівнює середньому значенню
швидкості протікання через НГ повітряного потоку. Лінійна теорія застосовується під час розрахунку режимів
роботи НГ на великих швидкостях польоту вертольота.
У цій теорії вводиться припущення, що вільні вихори
рухаються в однорідному повітряному потоці, швидкість якого приймається
рівною сумі швидкостей незбуреного потоку і середньої, за площиною обертання НГ, індуктивної швидкості. Ця теорія дозволяє дещо простіше,
ніж у нелінійній теорії, визначати поле індуктивних швидкостей на режимах
малих швидкостей ГП вертольота. У лінійній та квазілінійній вихрових теоріях форма і
положення вихрової пелени за НГ вважаються заздалегідь відомими і задаються. Під час розрахунку аеродинамічних характеристик лопатей НГ за вихровою теорією використовується гіпотеза
стаціонарності, за якою вплив примикаючих до лопаті вихорів не враховується.
За
виконання горизонтального польоту на граничних швидкостях коефіцієнт індукції
приймається рівним I = 1, тоді
формулу індуктивної швидкості можна спростити:
Індуктивний взаємовплив лопатей Взаємовплив
лопатей визначається на основі вихрової теорії. Лопаті НГ рухаються в потоці повітря, збуреному попередніми
лопатями. Основний вплив на аеродинамічні характеристики лопатей надають
кінцеві вихрові шнури лопатей і результуючі вихрові шнури всього НГ. Кожен вихровий шнур створює навколо себе в
незбуреному середовищі обертальний рух оточуючих його частинок повітря. У
вертольота середнього класу Мі-8
циркуляція кінцевих вихорів, які сходять з лопатей, дорівнює J(l) =
20 м/с2, радіус
вихору r
= 0,05 м. У вертольота важкого класу Мі-6 циркуляція кінцевих вихорів, що сходять з лопаті,
дорівнює J(l) =
35 м/с2, радіус вихору r = 0,1 м. При цьому на межі ядра вихору індукована вихором
швидкість дорівнює V (l) = 39 м/с.
Повністю
уникнути несприятливого взаємовпливу лопатей неможливо, проте провідними
вченими і науково-дослідними інститутами проводяться дослідні роботи щодо
зменшення впливу інтерференції лопатей одна на одну шляхом оптимізації
частоти обертання НГ, форми закінцівок його лопатей, встановленням на
кінцевих відсіках лопатей аеродинамічних перегородок для руйнування вихорів,
що сходять з кінцевих частин лопатей. Елементарні сили і моменти діють на елементи лопаті На елемент лопаті діють елементарні аеродинамічні сили і
моменти. Елементарну підйомну силу лопаті (dT) і елементарну силу лобового опору (dQ) елемента лопаті можна визначити за формулами:
Елементарний момент опору обертання: На лопать діє елементарний шарнірний момент, який прагне
скручувати лопать щодо її поздовжньої осі і в довільному перерізі лопаті на
радіусі (ri) дорівнює сумі елементарних моментів від аеродинамічних
сил, інерційних сил і конструктивних елементів лопаті (рис. 209):
Сумарні сили і моменти, що діють на лопать Сумарні
сили і моменти діють на лопаті представляють собою періодичні функції
азимутального кута
Входящі
в рівняння амплітуди сил і моментів, а також кути зсуву фаз Таким чином, сили і шарнірний момент, що діють на лопать,
являють собою суми окремих гармонійних складових, кожна з яких змінюється з
певною частотою, кратною частоті обертання НГ. При
цьому силами Динаміка лопаті в площині
тяги НГ Маховий рух лопаті в площині тяги Маховий
рух лопаті відносно ГШ визначається силами діючими на довільний
елемент лопаті довжиною
Так як,
будь-який шарнір сприймає і передає лише сили, але не може передавати момент
від сил, то сума моментів всіх діючих на лопать щодо осі ГШ дорівнює нулю.
Згідно рівняння зміни кута взмаху по азимутах Позитивні напрямки кутів Середній
кут конусності НГ – - масової характеристиці лопаті - загальному кроку НГ; - вертикальної швидкості протікання
повітряного потоку через НГ. Коефіцієнти
махового руху Екстремальні
кути змаху рівні:
На всіх
експлуатаційних режимах польоту вертольота екстремальні кути змаху лопатей
менше відповідних конструкційних обмежень, тобто зіткнення комлей лопатей з
упорами ГШ втулки НГ не відбувається. Основні закономірності махового руху лопаті НГ. Зміна
основних кінематичних параметрів наводяться для характерного перерізу r =
0,7 (рис. 213).
1. Змахуючі лопаті обертаються по образуючій, котра
утворює круговий конус вісь якого на режимах ГП відхилена (без урахування керуючого
впливу) назад і вбік – вліво щодо конструктивної вісі обертання НГ.
Відхилення вісі конуса обертання НГ
зростають зі збільшенням геометричних і кінематичних параметрів: - кута атаки НГ; - загального кроку НГ; - швидкості польоту вертольоту. 2.
Маховий рух лопаті відбувається
в основному за першою гармонікою кратною частоті обертання НГ; 3.
Завдяки маховому руху,
збільшення швидкості обтікання перерізів лопаті супроводжуються зменшенням
кутів атаки Внаслідок
махового руху кути
атаки кінцевих перерізів відстаючих лопатей в районі азимута При
збільшенні швидкості і висоти польоту маховий рух стає більш інтенсивним, що сприяє розширенню
зони зриву в азимуті Збільшення частоти обертання НГ (ωнв) сприяє зменшенню зони зриву потоку на кінцях
відстаючих лопатей в азимут
4.
Шарнірні кріплення лопатей не передають на втулку НГ і конструкцію вертольота
згинальних моментів. 5.
Коефіцієнти махового руху НГ з урахуванням
компенсатора змаху рівняються:
Компенсатор
змаху зменшує амплітуду махового руху лопатей і аеродинамічну несиметрію НГ на режимах ГП вертольоту.
Для створення рушійних і керуючих сил НГ наявність компенсатора змаху
вимагає більшого відхилення органів управління. Динаміка лопаті в площині обертання НГ Рух
лопаті в площині обертання відносно ВШ,
які характеризуються кутом коливання - аеродинамічною силою лобового
опору; - поперечною силою від прискорень в
площині коливання лопаті; - коріолісовою силою (сили яка виникає
при еволюціях лопаті в просторі для збереження моменту кількості руху
лопаті). Для
демпфірування коливань лопаті відносно ВШ
в конструкції втулки НГ встановлено гідравлічний демпфер, який створює
момент демпфірування:
При коливанні лопаті в площині обертання під дією моментів
від аеродинамічних сил лобового опору і інерційних сил відносно ВШ, а також під дією моменту
демпфера коливання лопаті НГ не потрапляють в зону резонансу. На
більшій частині площини обертання НГ змінні моменти від коріолісових і
аеродинамічних сил діють в протифазі, частково компенсуючи один одного, тому
що виникаючі збудження коливань не призводять до помітного збільшення
амплітуди коливання лопаті в площині обертання:
Подібне,
близьке до вібраційного, коливальний рух лопаті практично не впливає на: - швидкість обтікання лопатей; - кути атаки перерізів лопаті. Основні
закономірності коливання лопаті в площині обертання НГ: 1)
Середній кут відставання лопаті, пропорційний моменту, крутящому моменту НГ
і становить ζл = 5
– 100. 2)
Утримання лопаті при обертанні в діапазоні 5 – 100 обумовлено потужним стабілізуючим моментом
відцентрової сили. Внаслідок такої «динамічної жорсткості» лопать стає як би з жорстким кріпленням до втулки НГ. 3) При
розкручуванні НГ 4) При
зупинці НГ на землі або при гальмуванні обертального руху валу НГ
після відмови двигунів, лопаті по інерції переміщаються вперед по обертанню
аж до удару по переднім упорам ВШ. 5) На
всіх експлуатаційних режимах польоту вертольота ударів комлей лопатей по
упорам ВШ не виникає. Поняття про ідеальний і реальний
несучий гвинт вертольоту Загальні поняття про ідеальний НГ У ідеального НГ вся отримана від силової установки
потужність витрачається на виконання роботи НГ по відкидання повітря і
утворення тяги. У реального НГ крім виконання корисної роботи на
привід НГ існують і певні втрати потужності, а саме на: - подолання опору обертанню лопатей; - формування і закручування вихровий струменя повітря; - створення і нерівномірний розподіл індуктивних швидкостей і складових
тяги по захоплюваної площі НГ. У створенні сили тяги НГ бере участь не вся ометаєма
площа, а її частина, приблизно 70 –
80%, так як кореневі перерізи лопатей тягу не створюють, а на кінцях
лопатей має місце перетікання повітря з нижньої поверхні на верхню, що
викликає появу вихрових джгутів які сходять з лопатей. Облік вират НГ в
імпульсній теорії здійснюється за допомогою двох коефіцієнтів: - коефіцієнта корисної дії НГ – - коефіцієнта використання ометаємої площі НГ – χ. 1. Коефіцієнт корисної дії НГ –
2. Коефіцієнт використання ометаємої площі НГ – χ
З урахуванням розглянутих коефіцієнтів тягу НГ можна
визначити за формулою:
Таким чином, з формули випливає, що при
збільшенні діаметра НГ і розрахунковій потужності СУ тяга НГ
зростає не прямо – пропорційно, а пропорційно ступеню n = 2/3. Для
збільшення сили тяги НГ необхідна потужність СУ також зростає
не прямо-пропорційно, а в ступені n = 2/3. При зменшенні діаметра НГ сила тяги зменшується
пропорційно показника ступеня 2/3,
а необхідна потужність на привід НГ зростає за гіперболічним законом. Для незмінних значень розрахункової потужності СУ і
діаметра НГ сила тяги може бути збільшена: - як за рахунок аеродинамічної досконалості
НГ; - за рахунок механічної досконалості трансмісії вертольоту: коеффіцієнтів – χ; При зменшенні масової густини повітря сила тяги НГ при
постійній потужності, що підводиться, зменшується, а необхідна потужність для
забезпечення постійної сили тяги НГ – збільшується. Оцінка ефективності роботи НГ вертольоту Ефективність роботи НГ оцінюється коефіцієнтами
корисної дії. Умовно коефіцієнти к.к.д.
поділяються на: - коефіцієнт корисної дії ідеального
гвинта-ηід; - коефіцієнт корисної дії реального
гвинта-ηр. Коефіцієнти корисної дії (к.к.д.) показують наскільки ефективно використовується
потужність силової установки (СУ) що підводиться до НГ:
Як виходить з формули величина к.к.д. ідеального гвинта залежить від величини швидкостей:
вертикальної Vy,нв
і індуктивної υi
і суттєво збільшується при зменшенні індуктивної швидкості υi. Фізична
сутність ідеального к.к.д.
полягає в тому, що вигідніше отримати потрібну тягу, надаючи більшій масі
повітря меншу індуктивну швидкість. Виходячи з цього вигідніше, щоб НГ
мав якомога більший діаметр. Однак ідеальний к.к.д., як
правило використовуються при теоретичних дослідженнях і його значення суттєво
відрізняється від к.к.д.
реального НГ (ηр),
а саме: По перше – для НГ, що працює на місті, ідеальний к.к.д. дорівнює нулю (ηід= 0), так як вертикальна швидкість переміщення НГ
дорівнює нулю (Vy = 0). Однак НГ все ж споживає енергію, відкидає масу
повітря, створює тягу, необхідну для висіння і його ефектівность не може бути
рівною нулю, так як показує ідеальний к.к.д. По-друге – реальна потужність
відбирається від СУ суттєво більше, ніж ідеальна потужність (Nр > Nід),
так як мають місце витрати потужності на подолання профільного опору лопатей
і закручування відкидаємо НГ повітряної струї. Крім цього в ідеальній
потужності не враховуються витрати на подолання сил тертя і вихрестворення в
відкидаємому повітряному потоці (через нерівномірність розподілу поля
індуктивних швидкостей по ометаємій площі), окоренкові і кінцеві витрати
на лопатях НГ. В дослідженнях встановлено види і розмір різних витрат
потужності, що підводиться від СУ: - на подолання профільного опору
лопатей НГ –
2,0 – 2,5%; - на подолання нерівномірності поля
індуктивних швидкостей – 5 – 6%; - на подолання кінцевих і околокоревих витрат, а також на закручування
повітряного струменя НГ – 5
– 8%. З огляду на вище наведене видно, що реальний к.к.д. набагато менше
ідеального к.к.д. (ηр << ηід),
а для того щоб отримати потрібну тягу НГ рівній тягі ідеального
гвинта, до реального НГ необхідно підвести потужність на 40 – 50% більше, ніж до
ідеального гвинта. Для аналізу реальних витрат і оцінки ефективності роботи НГ
на режимах висіння використовується відносний к.п.д.-η0:
Коефіцієнт показує наскільки реальний гвинт по витраті
потужності наближаються до ідеального при отриманні однакової тяги НГ:
Для спрощення формули можна ввести відносні величини:
питоме навантаження на потрібну потужність – (q), питоме навантаження на
ометаєму площу НГ (р) і коефіцієнт летучості НГ
(енергетична якість НГ – EВ):
Тоді відносний коефіцієнт корисної дії НГ
розраховується:
Чим вище якість НГ, тим більший вантаж на одиницю
потужності може підняти НГ при заданому значенні питомого навантаження
на ометаєму площу. Величина відносного к.к.д.
характеризує аеродинамічну досконалість НГ.
Звідси випливає, що відносний к.к.д. НГ в основному залежить від аеродинамічних
характеристик НГ. Для збільшення к.к.д.
НГ необхідно збільшувати коефіцієнт тяги НГ (Сt) і зменшувати коефіцієнт крутящого моменту НГ
(Mкр). Фактори, що впливають на збільшення коефіцієнта тяги НГ: - збільшення несучих властивостей
профілів з яких виготовляється лопаті НГ; - зменшення кінцевих і ококоренкових витрат вибором оптимальної форми
лопатей в плані. Зменшення коефіцієнта моменту опору обертання НГ досягається зменшенням профільного опору елементів лопаті НГ, а саме: - якісної обробкою поверхні лопаті
НГ; - виведенням забоїн і деформацій поверхні лопаті НГ при експлуатації вертольоту. Загальні поняття про
потужність НГ Теорія ідеального НГ не враховує сил опору повітря
обертанню лопатей НГ, і так як не враховується в'язкість повітря, то і
не враховується сила опору. Потужність що підводиться до ідеального НГ,
витрачається тільки на створення тяги за рахунок збільшення кінетичної
енергії струменя повітря, що проходить через ометаєму площину НГ. Для загального випадку роботи НГ потужність
ідеального гвинта розраховується за формулою:
Для реального НГ, кожен елемент лопаті створює силу
опору, яка відносно вісі вала НГ утворює момент опору, що перешкоджає
обертанню НГ. На лопаті, як і на крилі мають місце всі види опору: тертя,
тиску, індуктивний опір і хвильовий опір. Моменти сил опору від усіх
елементів лопаті складаються і утворюється момент опору НГ, який
долається крутящим моментом (Мкр)
на валу НГ, який створюється силовою установкою. Момент опору НГ і його
залежність від режимів польоту Момент опору НГ можна виразити через аеродинамічний
коефіцієнт крутячого моменту (Mкр). В якості плеча моменту опору приймається радіус НГ, тоді
момент опору можна записати виразом:
Потрібну потужність для обертання НГ можна визначити за формулою:
Теорія ідеального гвинта не дозволяє визначити необхідний
крутящий момент і потужність для приводу НГ, тому для реального гвинта
необхідно враховувати його реальну компоновку. Момент опору і тяга НГ залежать від умов обтікання
кожної лопаті і від властивостей профілю лопаті. Залежності Для визначення конкретних характеристик лопаті і НГ,
необхідно знати дійсні кути атаки елементів лопаті і НГ в цілому, а
також індуктивні швидкості підсмоктування повітря в різних точках ометаємої
площі НГ. Момент опору НГ залежить від його режиму роботи. 1. Режим осьового обтікання:
За відповідними кутами атаки по довжині лопаті визначаються
аеродинамічні коефіцієнти елементів лопаті (Cx,p і Cx,i) і потім будується узагальнена графічна
залежність
Потрібна потужність для приводу НГ пов'язана з
моментом опору НГ певній залежності:
Як слідує з формули при постійних оборотах НГ (n = const) зміна необхідної
потужності в залежності від кута загального кроку НГ відбувається
внаслідок зміни коефіцієнта крутящого моменту mкр. Кінематика механізму управління НГ і автоматикою
двигунів спроектовані таким чином, щоб при збільшенні кута загального кроку НГ
потужність силової установки збільшується на величину приросту коефіцієнта
моменту опору НГ.
При збільшенні швидкості польоту необхідний крутящий момент
(Мкр) спочатку зменшується (через зменшення коефіцієнта моменту індуктивного опору), а потім повільно
збільшується (через повільне зростання коефіцієнтів крутящого моменту від
профільного опору, і від опору руху). Тому після досягнення відповідного
мінімуму крутящий момент повільно збільшується.
Згідно графіку, необхідна потужність при
збільшенні швидкості польоту, аналогічно зменшенню моменту опору НГ,
спочатку зменшується, а потім при досягненні мінімального значення починає
інтенсивно зростати, аналогічно зростанню моменту опору НГ. Це
пояснюється збільшенням профільного опору лопатей і опору руху НГ. Розрахункова потужність
силової установки і її розподіл на вертольоті Розрахункова потужність для обертання НГ і створення
тяги, залежить від потужності силової установки. Потужність силової установки в свою чергу залежить від: - кількості підведеного палива в двигуни; - висоти і швидкості польоту вертольоту; - температури повітря і масової густини. Розрізняють декілька режимів роботи двигунів силової
установки: - злітна; - номінальна; - крейсерська. Максимальна потужність, яку може створити двигун в певних
умовах називається ефективною потужністю (Ne).
Залежність зміни ефективної потужності від обертів турбокомпресора двигуна
називається зовнішньою характеристикою (Ne
= f(n)), залежність зміни потрібної потужності від обертів двигуна
називається дросельної характеристикою (Nр
= f(n)) (рис. 216). При проектуванні вертольоту здійснюється підбір двигунів і НГ
таким чином, щоб двигуни в робочому діапазоні навантажень працювали на
оптимальних оборотах.
Залежність ефективної потужності від висоти польоту
називається висотною характеристикою (Ne = f(H)). Висотність газотурбінних двигунів забезпечується
автоматичним регулюванням подачі палива і збільшенням температури газів перед
турбіною при збільшенні висоти польоту. При збільшенні швидкості польоту
збільшується тиск на вході в двигуни, за рахунок збільшення швидкісного
напору. Розрахункова потужність силової установки збільшується при збільшенні
швидкості польоту, через збільшення ефективної потужності СУ (Ne) (рис. 217). Розрахункова потужність силової установки збільшується при
збільшенні швидкості польоту.
Відносні витрати потужності силової установки витрачаються
на: - привід рульового гвинта – 8 – 15%; - тертя в трансмісії – 4 – 6%; - привід агрегатів охолодження
двигунів і агрегатів – 1 – 6%; - привід агрегатів
життєзабезпечення вертольотів – 0,5 –
1%; - подолання опору на вході в двигун
– 2 – 3%. Залежність розрахункової потужності силової установки
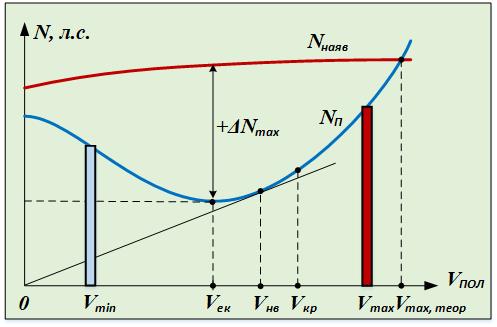
від швидкості польоту: Проведемо аналіз зміни кривих необхідної Nп і розрахункової Nр потужностей при
зміні швидкості польоту в умовах стандартної атмосфери. Для виконання горизонтального польоту (ГП) на заданій швидкості
необхідно за допомогою важеля «крок-газ» підвести до НГ
необхідну потужність (Nподв) рівну розрахунковій потужності для даних умов на заданій
швидкості Nподв = NпГП На кривій NпГП
можна виділити сім характеристик ділянок. Точка 1: Висіння (V = 0) можливо, якщо є надлишок потужності (ΔN = Nр - Nпотр), він необхідний для здійснення набору заданої висоти
висіння і парірування можливих відхилень по висоті під дією збурюючих сил. Точка 2: Відповідає мінімально –
допустимій швидкості ГП, яка визначається керівництвом з льотної
експлуатації даного типу вертольоту. Так для вертольоту АК1-3 – Vmin
= 50км/год, а для вертольоту Мі-2
– Vmin = 40 км/год. Точка 3: Відповідає економічної швидкості – Vек. Вона
визначається проведенням дотичної лінії до кривої NпГП паралельної осі швидкостей. На
цій швидкості необхідна мінімальна розрахункова потужність для ГП, а
отже і забезпечується найменша часова витрата палива і найбільша тривалість
польоту. Точка 4: Відповідає найвигіднішій
швидкості польоту – VНГ.
Вона визначається проведенням дотичної лінії з початку координат до кривої NпГП. На
цій швидкості на вертольотах з поршневими двигунами забезпечується мінімальна
витрата палива на кілометр шляху тобто можлива максимальна дальність
польоту. На вертольотах з газотурбінними двигунами вона є найвигіднішою
при зниженні вертольоту на режимі самообертання НГ для отримання максимальної
дальності планування. Точка 5: Відповідає крейсерській
швидкості польоту – Vкр,
на цій швидкості виконуються тривалі польоти за маршрутом. На вертольотах з
газотурбінними двигунами на цій швидкості забезпечується мінімальна
кілометрова витрата палива. Визначається як точка перетину потужності
відповідної крейсерському режиму роботи двигунів з кривою NпГП.
Для вертольоту Мі-2 – Vкр = 180 км/год.
На вертольотах АК1-3
керівництво з льотної експлуатації рекомендує польоти по маршруту до висоти 1000 м виконувати на швидкості
160 – 165 км/ч. Точка 6: Відповідає максимально-допустимій швидкості ГП, яка визначається
керівництвом по льотній експлуатації даного типу вертольоту. Для АК1-3 – Vmax = 180 км/год, а для Мі-2 – Vmax
= 210 км/год. Точка 7: Відповідає
максимально-теоретичної швидкості польоту – Vmax/теор., Визначається як
точка перетину кривих NпГП
і Nр. Значення характерних швидкостей для ГП змінюються,
якщо змінюються експлуатаційні фактори: - висота польоту; - температура зовнішнього повітря; - вага вертольоту.
Поняття про пружність лопатей НГ Пружність матеріалу лопатей НГ дуже впливає на
безпеку експлуатації вертольоту на землі і в польоті, а саме: 1. На стоянці, при необертальному НГ, на лопаті
діють масові сили, які згинають лопаті вниз і утримуються статичною пружністю
лопаті, аналогічно консольної балки з затисненим кінцем. 2. При розкручуванні і при зупинці НГ на лопаті
практично не діють відцентрові сили, які не можуть урівноважити масові сили
лопаті і вони утримуються тільки статичною пружністю лопаті. 3. При збільшенні обертів НГ
лопаті випрямляються під дією відцентрових сил і утворюють конус обертання НГ.
В лопатях виникає динамічна шорсткість, викликана відцентровими силами. 4. У горизонтальному польоті в
лопатях виникають невеликі пружні деформації, тому просторове положення лопаті
визначається в основному маховими рухами лопаті, а не пружністю лопатей. 5. В горизонтальному польоті махові рухи лопатей по
азимутам протилежні змінам згинальних деформацій в площині тяги НГ. Наприклад,
при змаху лопаті вгору, кінцева частина лопаті згинається вниз і навпаки.
Пружні деформації лопаті в площині обертання значно менше, ніж в площині тяги
внаслідок малої жорсткості лопаті. 6. У горизонтальному польоті в кінцевих перерізах
лопаті НГ виникають пружні крутильні деформації, при цьому велика
частка деформацій обумовлена не пружністю самої лопаті, а пружністю кріплення
в осьовому шарнірі. 7. Сумарні пружні деформації від всіх видів
навантажень лопаті збільшуються при: - збільшенні швидкості польоту; - виконанні енергійних маневрів; - збільшенні розмірів лопатей НГ. 8. Взаємовплив пружних згибаючих
і крутильних деформацій при накладенні конструктивних і експлуатаційних
чинників може викликати динамічну аеропружну нестійкість у вигляді: флатера, «земного резонансу»
і «вихрового кільця». Фізична сутність небезпечних
режимів навантаження лопатей НГ Флатер, фізична сутність флатера
У польоті на лопаті НГ діють збуджуваючі коливання аеродинамічних сил, а так само демпфіруючі
аеродинамічні і пружні сили. Швидкість польоту і частота обертання НГ,
при яких збуджуючі сили рівні демфіруючим, називаються критичними по флатеру. У польоті вертольоту на великій швидкості і при великій
частоті обертання НГ збуджуючі сили можуть перевищити демпфіруючі і
тоді може виникнути флатер. Умови, при яких може виникнути флатер На виникнення флатера впливають: - жорсткість конструкції лопаті на згинання і кручення; - місце розташування центру тиску; - розташування центру мас по
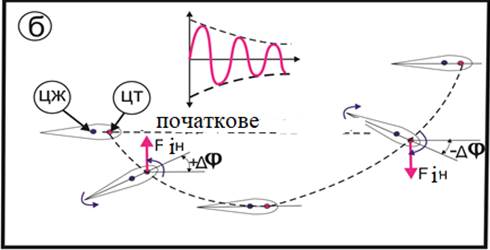
відношенню до центру жорсткості. Якщо лопать під дією аеродинамічних сил отримає вигин вниз
або вгору від початкового положення, то після припинення дії згинального
сили, під дією пружних сил, вона буде прагнути зайняти початкове положення,
але під дією сил інерції вона проходить початкове положення і згинається в
протилежну сторону. Якщо дії пружних сил будуть сильніше згибальних, то
коливання лопаті будуть затухаючими, а якщо будуть більше згибальних сили, то
коливання можуть стати збуджуючими і весь час будут збільшуватися.
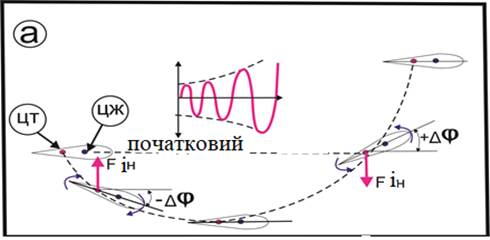
- при вигині лопаті вниз, в центрі мас виникає сила інерції Fін спрямована в
бік, протилежний руху центру мас (ц.м.) і лопать закручується
навколо центру жорсткості (ц.ж.) на зменшення кута установки,
що призводить до зменшення підйомної сили і це призводить до ще більшої
тенденції лопаті рухатися вниз. - при вигині лопаті вгору, з тієї ж причини її кут установки буде
збільшуватися, що призведе до збільшення підйомної сили і ще більшого
прагнення лопаті рухатися вгору. При цьому амплітуда і частота коливань
зростатимуть аж до руйнування лопаті.
- при вигині лопаті вниз в центрі мас (ц.м.) виникне сила інерції направлена вгору і лопать
закручується навколо центру жорсткості (ц.ж.) на збільшення кута установки,
що призведе до збільшення підйомної сили і зменшення амплітуди її коливання. - при вигині лопаті вгору, вона закручується на зменшення кута установки
кута, що призводить до зменшення підйомної сили і зменшення амплітуди і
частоти коливань лопаті.
Флатер може виникнути в польоті на швидкості близькій до
максимальної і ознаками його появи є: - тряска вертольоту з частотою не кратною частоті обертання НГ; - погіршення керованості вертольотом; - розмив конуса обертання через порушення «соконусності» лопатей НГ.
Дії пілота повинні бути спрямовані на зменшення енергії
коливання, а саме на зменшення швидкості набігаючого на лопать повітряного
потоку: - рукояткою корекції необхідно зменшити частоту обертання НГ до
мінімального значення; - зменшити швидкість польоту на 30
– 40 км/ч. Попередження: якщо спочатку зменшувати швидкість польоту, то при відхиленні
конуса обертання НГ може статися зіткнення лопаті з хвостовою балкою («випадає з конуса») Після припинення флатера можливе продовження польоту до
найближчого аеродрому на швидкості меншій на 30 – 40 км/год швидкості, на якій виник флатер. Якщо
флатер не припинився, то необхідно виконати екстрену посадку на обрану
площадку.
Флатер в даний час добре вивчений і при проєктуванні лопаті
він заздалегідь попереджається конструктивними заходами. Це досягається: - суміщенням центру шорсткості з віссю обертання вісьового шарніра; - застосуванням симетричного
профілю або близького до симетричного; - установкою противофлатерних грузиків в носовій
частині лонжерона лопаті. На заводі – виробнику лопатей їх перевіряють на флатер.
Сутність перевірки полягає в тому, що на задню кромку кожної лопаті
закріплюють грузики, які зміщують центр мас назад на 2% і доводять частоту обертання НГ на 1 – 2% більше частоти
обертання передбачуваного виникненню флатера. Якщо при цих умовах флатер не
виникає, то робиться припущення, що в і польоті він також не виникне. Флатер може виникнути в польоті при сильному обмерзанні
лопатей, що може призвести до зміщення центру мас перерізів лопаті назад до
хвостової частини профілю. Одним з основних діагностичних ознак відповідності
параметрів лопатей нормативним вимогам є соконусність лопатей НГ (знаходження всіх лопатей на утворювачій
конуса при сталому обертанні НГ). Соконусність обертання
лопатей НГ перевіряється і здійснюється регулюванням після: - заміни автомата перекосу; - заміни втулки і лопатей НГ; - появи підвищеної тряски вертольоту. Регулювання соконусності здійснюється на середніх оборотах НГ,
зміною довжини тяг АП, що викликає зміну кута установки лопатей НГ,
а на великих оборотах - відгином тримерних пластин лопатей НГ. Земний резонанс Фізична сутність «земного резонансу» «Земним
резонансом» називається явище, при якому відбувається збіг частоти
коливань НГ з частотою власних коливань вертольоту, що знаходиться на
землі, коли амортизатори частково розжаті і енергія коливань не може
розсіюватися через амортизатори. Ці коливання відносяться до само
збуджувальним і відбуваються тільки в поперечній площині. Виник «земний
резонанс» внаслідок впровадження в конструкцію НГ вертикальних
шарнірів (ВШ). За певних умов, при
знаходженні вертольоту на землі в підвішеному стані, «земний резонанс» може
виникнути і на вертольоті з полозковим шасі. У польоті лопать НГ здійснює коливальні рухи навколо
вертикальних шарнірів (ВШ) за рахунок сил коріоліса, а
так само за рахунок зміни профільного опору лопаті по азимутам. Однак ці
коливання незначні, так як при великих обертах НГ виникають
відцентрові сили, які утримують лопаті (під кутом 1200 на 3-х лопатних НГ і під кутом 720 на 5-ти
лопатних НГ) один до одного, центр мас (ц.м.) всіх лопатей збігається з центром обертання НГ
(віссю валу головного редуктора) і коливання в площині обертання НГ
відсутні. Під час руху вертольоту по землі (рулювання, розбіг, пробіг)
оберти НГ менше ніж в польоті, і тому виникають менші відцентрові сили.
Збурені коливання вертольоту виникають через руління вертольоту по
нерівностям грунту, при цьому лопаті можуть займати різне кутове положеннях
щодо вертикальних шарнірів, тож між лопатями кут їх положення може стати
більше або менше 1200
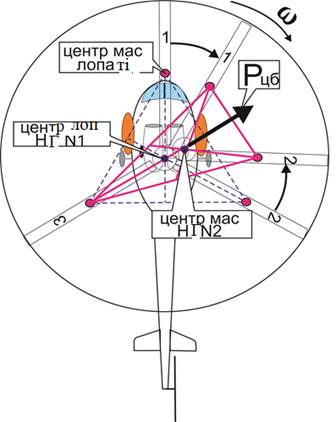
або 720. Лінії, що з'єднують центри мас (ц.м.)
лопатей утворюють нерівносторонні трикутник, центр мас (ц.м.) НГ визначається на перетині медіан
трикутника. Загальний центр мас (ц.м.)
НГ зміщується від вісі обертання НГ і починає рухатися по
складній замкнутої траєкторії. На втулці НГ виникає неврівноважена
відцентрова сила «РЦБ»,
яка і розгойдує несучу систему НГ з певною частотою. Разом з несучою
системою розгойдується і вертоліт. При невеликій частоті обертання НГ з обжатими амортстійками
шасі коливання вертольоту демпфіруються амортизаторами, пневматиками коліс і
гіродемпферами вертикальних шарнірів (ВШ) і при цьому частота коливань вертольоту не буде
збігатися з частотою коливань НГ, що виключає явище резонансу. При збільшенні частоти обертання НГ і збільшенні
кроку НГ (руління по
нерівному грунту) неврівноважена відцентрова сила зростає, а вплив
демпфіруючих сил зменшується, зважаючи на зростання підйомної сили НГ
і зменшення обжаття амортизаторів і пневматиків коліс.
При недостатньо обжатих амортизаторах змінюється частота
коливань вертольоту і вона може збігтися із збуреною частотою коливань
несучої системи, це може привести до виникнення резонансу на цих частотах і
появи «земного резонансу». Коливання вертольоту при цьому різко зростають і
при невтручанні пілота можуть досягти критичної величини, які можуть привести
до перекидання вертольоту і подальшого його руйнуванню. Рульовий гвинт, як потужний гіроскоп, буде відставати від
поперечних коливань фюжеляжу вертольоту і це може привести до деформацій або
навіть до руйнування хвостової балки. Умови, при яких може виникнути «земної резонанс». Земний
резонанс може виникнути при порушенні правил експлуатації
амортизаторів, пневматиків коліс і гіродемпферів вертикальних шарнірів.
- бічний порив вітру; - різке і значне відхилення РЦШ
від нейтрального положення; - наїзд на кочку при рулінні на великій швидкості; - посадка з пробігом або зліт з розгоном по не рівній поверхні
майданчику.
- великий загальний крок НГ при рулінні вертольоту по землі; - висока температура повітря, що викликає зменшення в'язкості масла в
гідравлічних демпферах. Ознаки виникнення «земного резонансу». При запуску двигуна, при рулінні вертольоту по землі з
нерівною поверхнею в підвішеному стані або при вертикальній посадці вертоліт
самовільно починає розгойдуватися з наростаючою амплітудою в поперечній
площині. Дії пілота при виникненні «земного резонансу». Дії пілота повинні бути спрямовані на зменшення підведення
енергії для розвитку коливань і усунення причин, що викликають коливання
лопатей щодо вертикальних шарнірів. З огляду на швидкий розвиток «земного
резонансу» (від початку до
руйнування вертольоту проходить приблизно 6 – 7 сек.) дії пілота повинні бути своєчасними і швидкими.
1. Повністю вивести корекцію газу на мінімальні обороти і
одночасно енергійно опустити важіль «крок-газ» вниз до упору, що дозволить
зменшити підвід енергії до НГ для розвитку коливань і збільшити роботу
сил демпфіруючих коливання. 2. Встановити РЦШ в нейтральне положення, що дозволить зменшити
розбалансування НГ. Якщо «земний резонанс» виник при рулінні вертольоту по
землі, то крім зазначених дій необхідно зменшити швидкість руху гальмуванням
коліс (забороняється
гальмувати рух вертольоту відхиленням РЦШ «на себе») при необхідності до повної
зупинки. Якщо після виконаних дій поперечні коливання вертольоту не
припинилися, то необхідно екстрено вимкнути двигуни. Після припинення
«земного резонансу» зліт забороняється, необхідно зупинити НГ,
вимкнути двигуни і ретельно оглянути вертоліт.
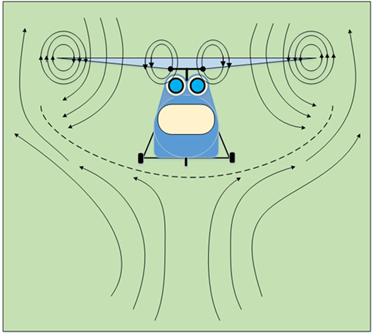
Фізична сутність «вихрового кільця». При зниженні вертольоту з працюючими двигунами з малою
поступальною швидкістю і великою вертикальною швидкістю (рівній
індуктивної швидкості) під НГ зустрічаються два потоки – індуктивний
потік зверху і потік, що набігає знизу, таким чином на деякій відстані під НГ
утворюється поверхня розділу (рис. 221), в якій ці швидкості
рівні, а результуюча швидкість дорівнює нулю. При збільшенні вертикальної швидкості поверхня розділу потоків
наближається до НГ, на якому відбуваються такі явища: - біля кореневій частині лопаті НГ повітряний потік
знизу виявляється більшим від індуктивного потоку від НГ, він
проривається через втулку НГ, що веде до збільшення кутів атаки біля
кореневих перерізів лопаті і зриву потоку на них;
- на кінцевих перерізах лопатей через наявність
геометричної крутки збільшення кутів атаки не велике, але при цьому
посилюється інтенсивність вихрестворення на кінцях лопатей; - зрив потоку біля кореневих перерізів і збільшення
кінцевих вихорів веде до зменшення підйомної сили НГ і збільшення
вертикальної швидкості зниження; - залучення в циркуляційний рух через ометаєму площину
несучого гвинта великої маси повітря вимагає витрат потужності на підтримку
цього руху, а маса повітря відкидається НГ значно зменшується. Тому
підйомна сила НГ зменшується навіть при роботі двигунів на злітному
режимі, це призводить до подальшого збільшення вертикальної швидкості, яка
збільшується до тих пір поки по всій ометаємій площині НГ набігаючий
знизу потік не стане проходити знизу вгору, при цьому перерізи лопаті
обтікаються на режимі самообертання, а вертикальна швидкість зниження
збільшитися до 10 м/с і
більше. Умови, при яких виникає режим «вихрового кільця». Режим «вихрового кільця» може виникнути при моторному
зниженні з поступальною швидкістю меншою 40
км/год і вертикальною швидкістю більше 2 – 3 м/с. Умови для виникнення «вихрового кільця»
можуть виникнути, в наступних випадках: 1) При заході на посадку з попутним вітром. 2) При заході на посадку з перельотом при спробі виправити розрахунок,
зменшивши поступальну швидкість і збільшивши вертикальну. 3) При заході на посадку на майданчик обмежених розмірів, оточеним
високими перешкодами. 4) При виході з авторотації на малій швидкості збільшенням загального
кроку без попереднього збільшення поступальної швидкості. Ознаки виникнення «вихрового кільця». 1. Швидке самовільне збільшення вертикальної швидкості
зниження. 2. Безладні коливання вертольоту по крену і курсу. 3. Посилення вібрацій. 4.
Коливання частоти обертання НГ. 5. Погіршення
ефективності управління вертольотом. Дії пілота при попаданні в режим «вихрового кільця». При виникненні самовільного зниженні вертольоту пілоту
необхідно зменшити вертикальну швидкість зниження плавним збільшенням
загального кроку НГ. Тяга НГ при цьому збільшиться за рахунок
збільшення кутів атаки лопатей. Якщо біля кореневих перерізах лопатей вже
утворилася зона зриву потоку, то при збільшенні загального кроку НГ
зона зриву розшириться, що призведе до збільшення вертикальної швидкості.
Якщо збільшенням загального кроку НГ не вдалося зменшити вертикальну
швидкість, то необхідно збільшити поступальну швидкість вертольоту до 40 км/год і більше з метою
виходу з режиму «вихрового кільця», і після досягнення швидкості понад
40 км/год збільшенням загального
кроку НГ припинити зниження вертольоту. Заходи щодо запобігання потрапляння в режим «вихрового
кільця». Дотримуватись обмежень щодо мінімальної горизонтальної і
максимальної вертикальної швидкості польоту. 1) Уникати посадки з попутним вітром. 2) Посадку з перельотом виправляти повторним виконанням
польоту по другому колу. 3) Пам'ятати, що найбільша ймовірність попадання в режим «вихрового
кільця» можлива: - при польотній масі
вертольоту
близькій до максимальної; - при польоті на великій висоті; - при високій температурі повітря і малій масовій щільності повітря. Динамічна міцність лопатей НГ Динамічна міцність лопаті визначається в основному
нормальними напруженнями (σr)
в поперечних перерізах лонжерона лопаті, що виникають в польоті під дією
розтягуючих відцентрових сил і змінних по азимуту згинальних моментів.
1) силове навантаження лопаті НГ включає в себе: - поперечні сили; - згибальний і крутящий момент; - які сприймаються єдиним силовим елементом - лонжероном
лопаті; 2) згинальні динамічні напруги змінюються по відповідним
азимутам за один оберт НГ; 3) амплітуда згинальних динамічних напружень в площині тяги
істотно змінюється по довжині лопаті і характеризує міцність від утоми
лонжерона лопаті; 4) найбільш навантаженим є кінцева ділянка лопаті r = 0,7 – 0,9R, при цьому
максимальний рівень змінної напруги діє на нижню поверхню лонжерона лопаті; 5) при
обертанні НГ постійна складова згибаючих напружень визначається відцентровою силою в перерізах; 6) для
забезпечення заданої міцності лопаті при виготовленні вводиться коефіцієнт
безпеки, рівний fв = 1,5 – 2,5
що враховує нерівномірність характеристик матеріалу, відхилення в технології
виготовлення лонжерона і інші випадкові чинники; 7)
найбільше значення напруг статичної добавки від відцентрових сил відповідає
режиму розкрутки НГ понад допустиму частоту обертання, тому лопаті конструюють таким чином, щоб вони могли витримувати розкрутку до ωмакс ≈ 1,2
ωпот з урахуванням fв ≈ 2, при цьому розрахункова руйнуюча відцентрова сила майже в 3 рази більше, ніж відцентрова сила в нормальних умовах
експлуатації; 8) на
динамічний
напружений стан лонжерона лопаті впливають: - режими польоту: швидкість
польоту, висота, переванта-ження; - польотна маса і центровка; - частота обертання НГ; - атмосферна турбулентність. 9) найбільше
значення амплітуди змінної напруги в площині тяги виникають на режимах
горизонтального польоту вертольоту з
максимальною швидкістю, на маневрах типу гірки і віражу-спіралі з великими
перенавантаженнями, також на режимах малих швидкостей на
великих кутах атаки і нерівномірності поля індуктивних швидкостей НГ; 10)
збільшення частоти обертання НГ,
викликає збільшення відцентрових сил в лопаті, що зменшує динамічне
напруження в середній і кінцевих частинах лонжерона; 11) збільшення
польотної маси вертольота від нормальної до максимальної викликає збільшення амплітуди змінних згибальних напружень в лонжероні на крейсерських режимах
на 20 – 30%; 12) на
маневрених режимах польоту відбувається збільшення змінних напруг в лонжероні
на 15 – 20% у порівнянні з
максимальними значеннями напруг в лонжероні на режимах горизонтального
польоту; 13)
підвищена атмосферна турбулентність збільшує динамічну напругу лопатей
на 15 – 20%. Характеристика зіткнень лопатей по упорам ГШ і ВШ. У звичайному горизонтальному польоті зіткнень комлей
лопатей з упорами шарнірів не відбувається, при цьому пружні деформації в
площинах тяги і обертання відповідають в основному власним формам згибальних
коливань шарнірно закріпленої обертаючої балки. Однак в деяких особливих
ситуаціях нормальні розрахункові умови роботи пружною лопаті можуть бути
порушені.
- різке зменшення загального кроку
НГ; - обдув НГ зверху сильним
повітряним потоком або низходящим поривом
вітром; - різке відхилення конуса НГ в одне із крайніх положень; - енергійні кутові еволюції
вертольоту в просторі по тангажу і крену; - різке зменшення частоти обертання
НГ; - перевищення
максимально-допустимої швидкості польоту.
- пружний вигин лопаті після
удару її комля по упору відбувається за формою консольно затисненої пружної балки; - кінцева частина лопаті в азимуті 3600
проходить в небезпечній близькості від хвостової балки, а в
азимуті 140 – 2200 проходить
в небезпечній близькості від вхідних пристроїв двигунів і кабіни екіпажу
вертольоту; - при ударі по упору пружний вигин кінця
лопаті набагато більший в порівнянні з безударним маховим рухом
в польоті. Ця різниця зростає при збільшенні кутової швидкості змаху лопаті в момент удару по упору
і обумовлено впливом компенсатора помаху на шорсткість лопаті; - згибні динамічні напруги в лонжероні
лопаті зростають в 2 – 3
рази в порівнянні з розрахунковими
умовами безударного
махового руху, але не досягають межі міцності
матеріалу. Таким чином, при ударі лопаті по упорам ГШ руйнувань лопаті не відбувається,
однак при сильному пружному згибанні лопаті вниз можливий удар лопаті по конструкції
фюзеляжу вертольоту (вхідним пристроям двигунів, кабіні екіпажу і хвостовій
балці) з можливим аварійним виходом. З огляду на те, що при обертанні НГ в лопатях
виникають великі за величиною відцентрові сили, то зіткнень біля кореневих
частин лопаті по упорам ВШ в польоті практично не відбувається. Перевищення максимально
допустимої швидкості польоту Фізичні явища, що відбуваються при перевищенні
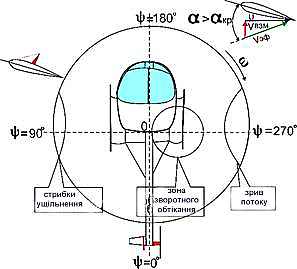
максимальної швидкості польоту При перевищенні максимально допустимої швидкості польоту на
лопатях НГ в азимуті ψ
= 2700 на кінцевих елементах відбувається зрив потоку, а
на кореневому перерізі збільшується зона зворотного обтікання, в азимуті ψ = 900 на
лопатях НГ утворюються місцеві стрибки ущільнення. Ці явища погіршують
аеродинамічну якість НГ. Найбільший негативний ефект викликає зрив
потоку. У азимуті ψ
= 2700 відступаючі лопаті махають вниз і з'являється
додатковий потік повітря знизу Vвзм,
крім того, ефективна швидкість потоку при обтіканні елемента лопаті
зменшується:
Ці два явища призводять до збільшення кута атаки лопаті в
азимут ψ = 2700,
на кінцевих елементах він може перевищити критичне значення і з'явиться зрив
потоку. Умови, при яких виникає зрив потоку Зрив потоку відбувається при перевищенні максимально-дозволеної
швидкості польоту, його появі сприяють: 1) велика висота (зменшується масова густина
повітря, посилюються махові рухи лопатей, для польоту потрібно
збільшити крок НГ); 2) велика польотна маса (потрібна
велика потужність, великі загальні установчі кути
лопатей); 3) зменшення частоти обертання НГ (посилюються махові руху лопатей, зменьшується ефективна швидкість обтікання
лопатей в азимуті 2700). Ознаки виникнення зриву потоку з лопатей НГ. 1) Тряска вертольоту. 2) Крен вертольоту вправо і кабрірування. 3) Погіршення керованості вертольотом. 4) При подальшому розвитку зриву потоку з лопатей НГ – посилення
розкачки, повна втрата керованості.
Дії пілота при виникненні зриву потоку. Дії пілота повинні бути спрямовані на зменшення махових
рухів лопатей, на зменшення кутів атаки: 1) плавно зменшити кути установки
лопатей НГ, незначним опусканням важіля «крок-газ»; 2) зменшити швидкість польоту
взяттям РЦШ «на себе». Перенавантаження несучого гвинта Фізична сутність перенавантаження НГ. Для того щоб НГ обертався з постійною
частотою, потужність що підводиться до нього повинна
дорівнювати розрахункові потужності. При збільшенні кутів установки лопатей,
збільшується потужність, що підводиться до НГ. В результаті, при
переміщенні важеля «крок-газ» вгору збільшується підйомна сила НГ. Можливі випадки, коли при переміщенні важеля «крок-газ»
вгору до НГ буде підводитися потужність менша необхідної, частота
обертання НГ і підйомна сила НГ буде зменшуватися –
відбувається перенавантаження НГ. Можливі два варіанти перевантаження: 1) Важіль «крок-газ» піднімається вгору швидше, ніж зростає потужність
двигунів (зростання потужності відстає через недостатню приємистості особливо
у газотрубних двигунів). 2) Важіль «крок-газ» піднімається в нормальному темпі, але вище злітного
режиму – потужності злітного режиму двигунів недостатньо, щоб зберегти
частоту обертання НГ при великих кутах установки лопатей. Умови, при яких виникає перенавантаження НГ. Перенавантаження найбільш ймовірно при польотній масі
вертольоту більше максимально допустимої для даних умов, при зльоті та
посадці на високогірний майданчик, при високій температурі повітря (зменшується потужність
двигунів).
1) При зльоті важіль «крок-газ» піднімається швидким темпом. За рахунок
використання кінетичної енергії НГ вертоліт може відірватися від землі і
набрати певну висоту, але зависання не відбудеться і вертоліт різко знизиться
з грубим приземленням. 2) При зльоті по-вертолітному з розгоном швидкості в зоні впливу
«повітряної подушки». При відсутність запасу потужності на висінні, пілот
відхиляє РЦШ «від себе» для розгону швидкості, вертоліт знижується, режим
двигунів злітний і щоб уникнути удару об землю, пілот тягне важіль «крок-газ»
вгору вище злітної режиму, НГ перенавантажується, зменшується частота
обертання НГ і вертоліт грубо вдаряється об землю, часто з перекиданням. 3) При зльоті по-вертолітному з розгоном швидкості в зоні впливу
«повітряної подушки» в бік перешкод. Після переводу вертольоту в набір висоти
на злітному режимі двигунів пілот бачить, що траєкторія набору пройде нижче
висоти перешкоди і щоб уникнути зіткнення з перешкодою він тягне важіль
«крок-газ» вгору, на якийсь час збільшується вертикальна швидкість, але потім
частота обертання НГ зменшується і вертоліт грубо приземляється або падає на
перешкоду. 4) На передпосадковій прямій. Пілот пізно почав гасити швидкість,
посадка вийде з перельотом і щоб виправити помилку він зменшує поступальну швидкість
(РЦШ «до себе») і збільшує вертикальну (важіль «крок-газ» вниз). Перед
приземленням пілот, щоб погасити велику вертикальну швидкість, піднімає
важіль «крок-газ» до положення злітного режиму, але вертоліт продовжує
знижуватися з великою вертикальною швидкістю (велика інерція, недостатня
прийомистість двигунів) і щоб уникнути удару об землю пілот тягне важіль
«крок- газ » вгору перенавантажує НГ, груба посадка, можлива поломка
вертольоту. 5) При заході на посадку на майданчик обмежених розмірів. Пілот не
врахував, що на майданчику висока температура і немає вітру. Вертоліт при
зависанні, після переходу з косою обдування на осьову, різко знижується.
Пілот піднімає важіль «крок-газ» до злітного режиму, вертоліт продовжує
знижуватися і щоб уникнути удару об землю пілот тягне важіль «крок-газ»
вгору, перенавантажує НГ, груба посадка, можлива поломка вертольоту. 6) При виконанні підльоту на малій
висоті з великою швидкістю (НГ працює в режимі косого обтікання). Перед
місцем приземлення пілот гасить поступальну швидкість (РЦШ «до себе»),
збільшується кут атаки НГ, вертоліт набирає висоту і
збільшує частоту обертання НГ. Пілот, витримуючи задану висоту,
опускає важіль «крок-газ» вниз (на газотурбінних двигунах автоматика,
прагнучи зберегти постійну частоту обертання НГ, зменшує потужність двигунів). В
цей час вертоліт переходить з косого обтікання на вісьове і починає різко знижуватися. Пілот
щоб уникнути зіткнення із землею піднімає важіль «крок газ» швидше, ніж
збільшується потужність
двигунів, а вертоліт продовжує знижуватися, і щоб уникнути удару об землю,
пілот ще більше піднімає важіль «крок-газ», перенавантажує НГ, груба посадка, можливе перекидання вертольоту. Ознаки перенавантаження НГ При перенавантаженні НГ зменшується частота
обертання НГ до значення нижче мінімально – допустимого і відбувається
мимовільне зниження вертольоту.
1) Погіршенням керованості і зменшенням запасів управління. Через
зменшення частоти обертання НГ і рульового гвинта права педаль може виявитися
на упорі, так як при перенавантаженні збільшується реактивний момент НГ, а
тяга РГ зменшується. 2) На вертольоті з газотурбінними двигунами збільшенням температури
газів перед турбінами двигунів і зменшенням їх потужності – падає частота
обертання НГ нижче мінімальної, можливий зрив потоку з лопаток вільної
турбіни. 3) Виникненням на НГ режиму «вихрового кільця». Якщо перенавантаження
відбулося на малій швидкості, а вертикальна швидкість зниження перевищує
допустиму. Дії пілота при перенавантаженні НГ При перенавантаженні НГ необхідно, для відновлення
частоти обертання НГ, незначно зменшити загальний крок НГ і в
подальшому збільшення загального кроку НГ здійснювати з темпом
відповідним темпу збільшення потужності двигунів. Заходи запобігання перенавантаження НГ
1) Важіль «крок-газ» пересувати плавно, пропорційно збільшенню
потужності двигунів. 2) При досягненні злітного режиму роботи двигунів припинити збільшення
кроку НГ. 3) Перед кожним злетом розраховувати максимально допустиму масу
вертольоту для зльоту і посадки в даних умовах. 4) Не переводити вертоліт в розгін швидкості, якщо на висінні немає
запасу потужності. 5) Уникати зльоту в сторону перешкод. 6) При виконанні польоту на незнайомий майданчик першу посадку
розраховувати для умов: без використання впливу «повітряної подушки». 7) При заході на посадку з перельотом виправляти помилку відходом на
друге коло.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
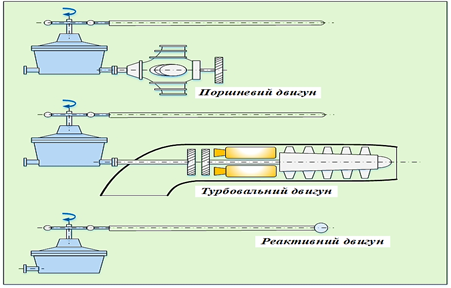
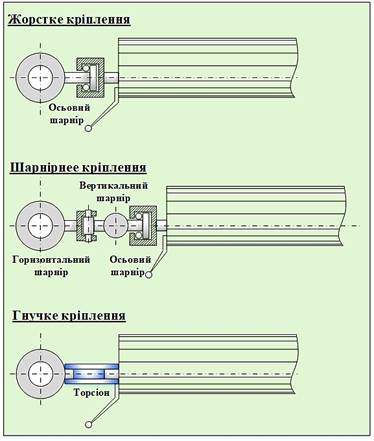
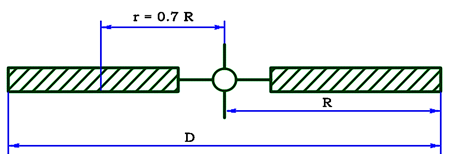
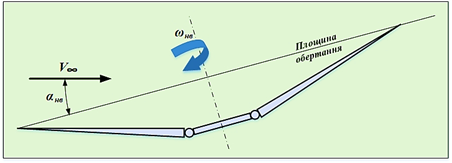
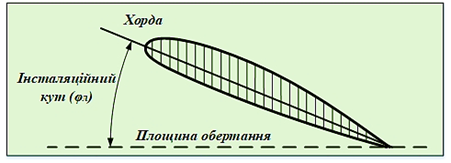
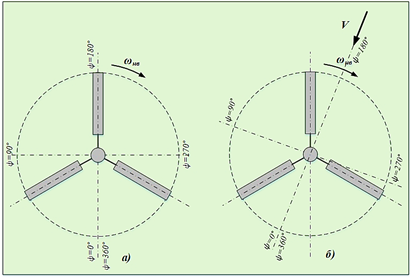
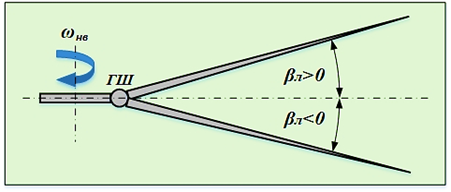
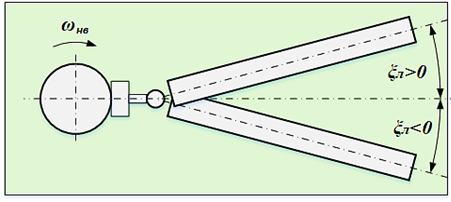

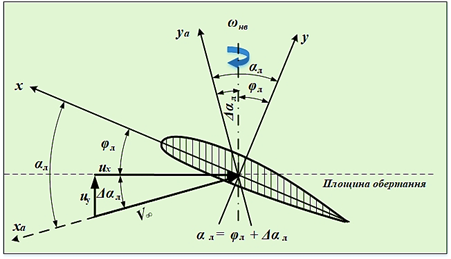

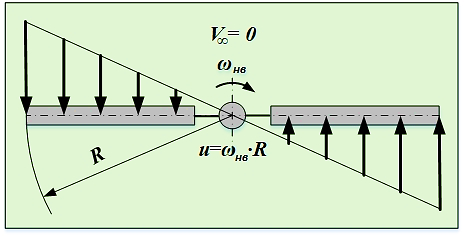
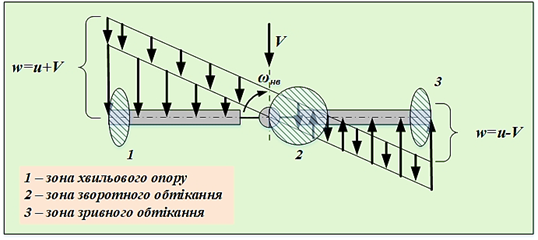
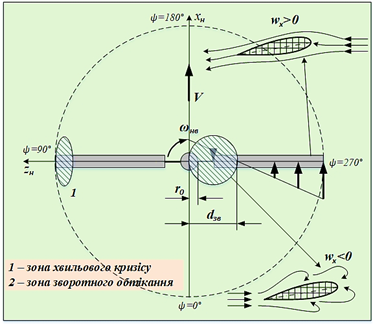

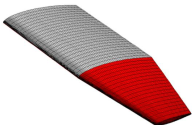
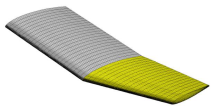
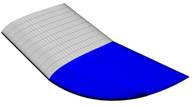
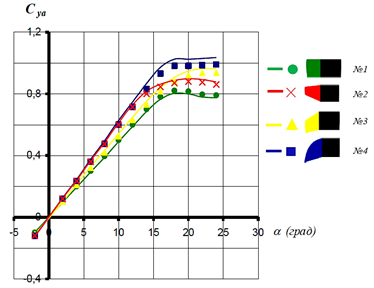
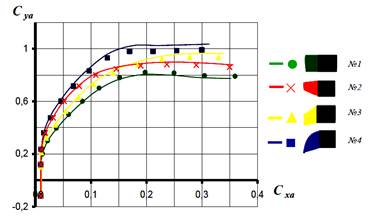
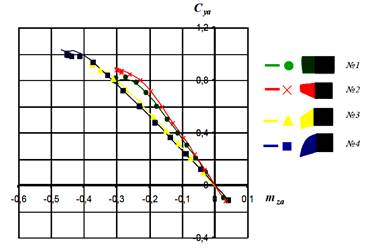
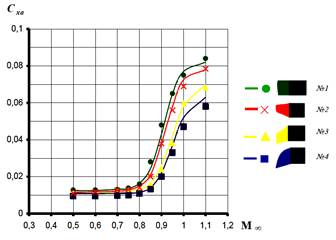
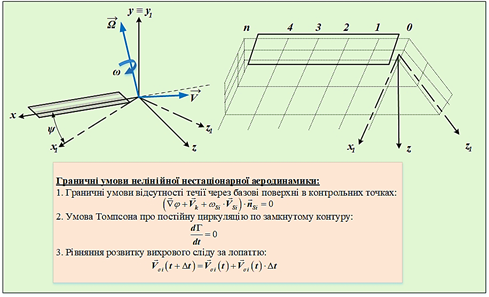
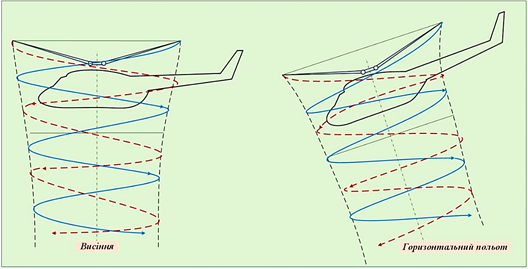
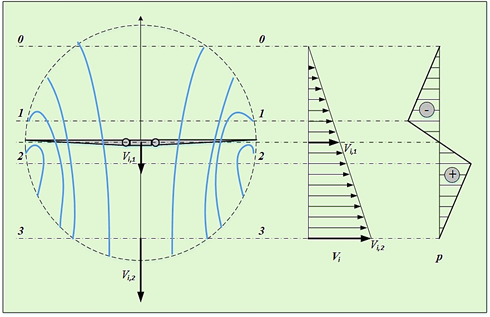

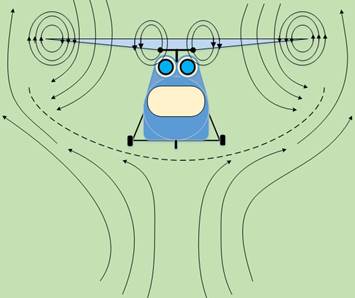
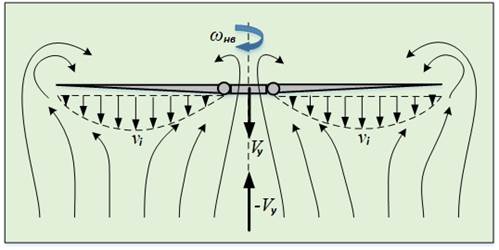
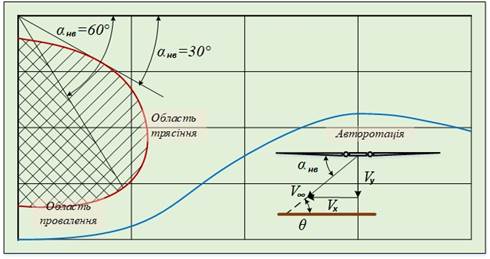
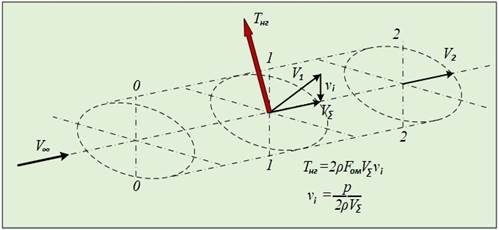

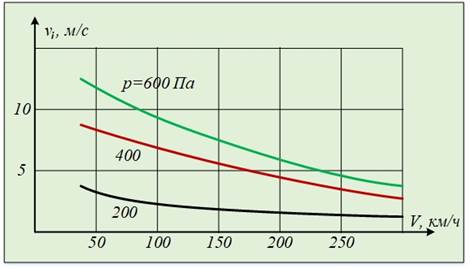


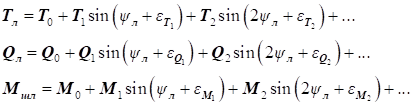
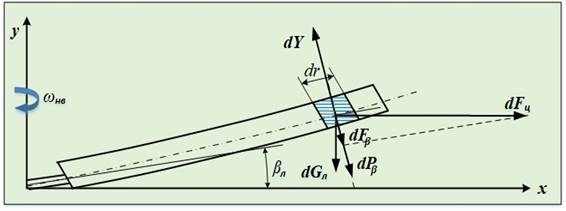


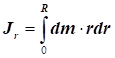
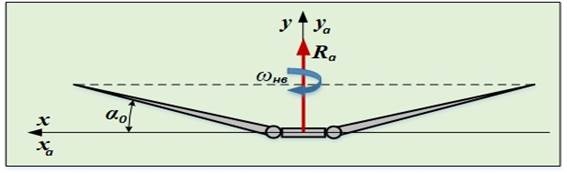
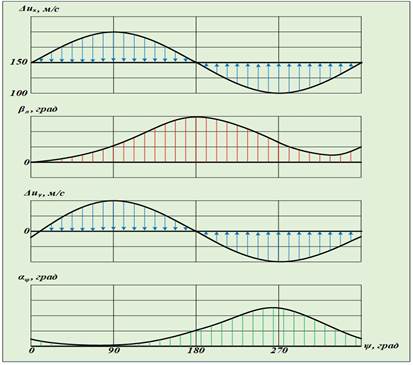
 ;
;

 ,
,

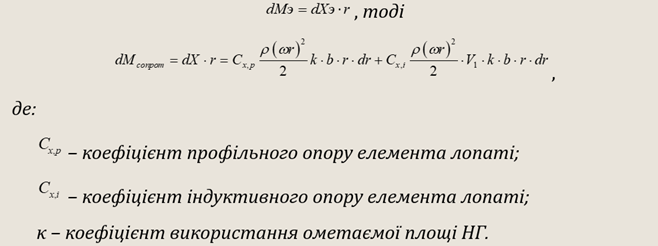
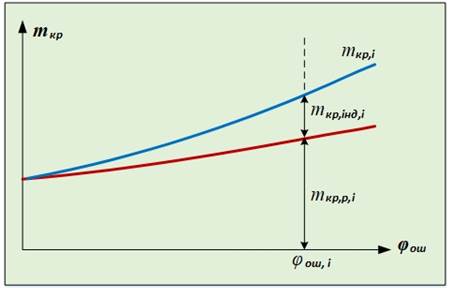
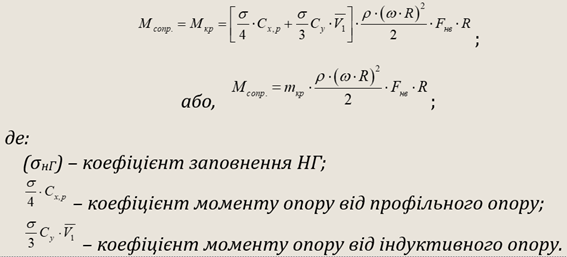
 +
+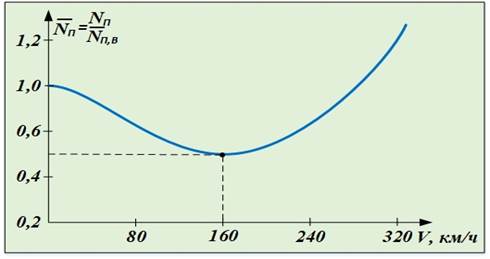
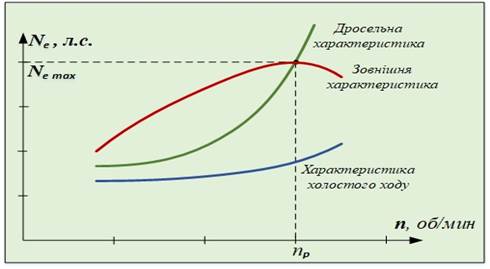
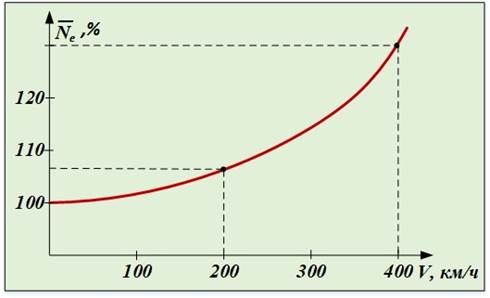
 ,
,  ,
,