|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. УСТАЛЕНИЙ
РУХ ЛІТАЛЬНИХ АПАРАТІВ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Найбільш простим видом польоту є сталий політ за
прямолінійними траєкторіями.
Рівняння сил, що забезпечують прямолінійність польоту
вертольота на конкретному режимі, можна отримати із загальних рівнянь
усталеного руху:
Для виконання усталеного руху необхідно, щоб НГ
створював результуючу аеродинамічну силу (повну тягу) Тнг,
що дорівнює потрібній аеродинамічній силі Rнг_п на цьому режимі польоту.
В усталеному
наборі висоти за нахиленою траєкторією потрібна тяга НГ більше,
ніж у горизонтальному польоті, за інших рівних умов на величину (2*Xф * G * sinθ) під коренем. Надлишок
величини потрібної тяги НГ у разі набору висоти за нахиленою
траєкторією, (як порівняти з горизонтальним польотом) виконує роботу,
що витрачається на збільшення повної механічної енергії вертольота (збільшується потенційна
енергія за постійної кінетичної). За сталого
зниження за нахиленою траєкторією потрібна тяга НГ на цю саму
величину менше, ніж у горизонтальному польоті, при цьому зменшується
потенційна енергія вертольота. Необхідна тяга залежить від величини польотної маси.
Збільшення маси, а отже, і сили тяжіння вертольота призводить до збільшення
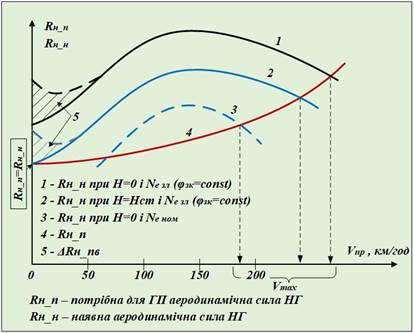
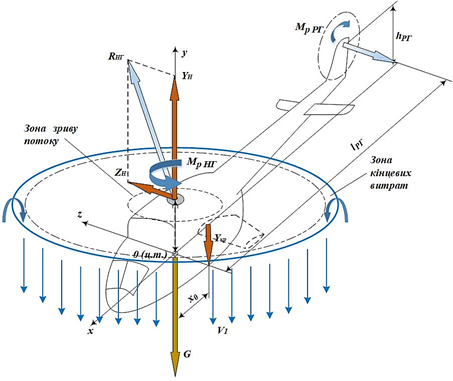
необхідної тяги на всіх сталих режимах польоту і навпаки. Несучий гвинт створює тягу Rнг за рахунок підведеної до нього потужності
силової установки. Максимально можливу величину тяги Rнг_н несучий гвинт розвиває під час роботи
двигунів на максимальному (злітному) Neвзл, режимі. Її прийнято називати наявною (рис. 2.1.1).
Розрахункова тяга НГ Rнг_р не залежить від
величини маси вертольота, але залежить від висоти польоту і температури
зовнішнього повітря, оскільки від цих чинників значно залежить потужність
двигунів. Розрахункова тяга НГ Rнг_р змінюється, підкоряючись характеру зміни
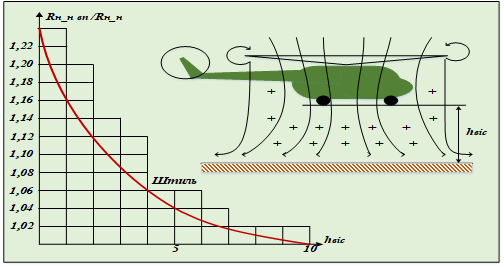
злітної потужності двигунів від висоти і температури зовнішнього повітря. Значний приріст розрахункової (що розвивається) тяги НГ відбувається
у разі висіння вертольота поблизу землі через вплив повітряної подушки. Ефект повітряної подушки зменшується за збільшення висоти
висіння над майданчиком. Практично відчутний вплив повітряної подушки на тягу
НГ поширюється до висоти висіння (hвіс.), яку визначає пілот від землі
до рівня коліс (рис. 2.1.2), приблизно дорівнює величині
радіуса НГ. Додатковий приріст розрахункової тяги НГ становить 25–30% (рис. 2.1.2). У льотній практиці необхідно враховувати, що вплив
повітряної подушки зникає під час виконання висіння над чагарником (очеретом, високою травою) і над водною поверхнею. У цих
випадках енергія повітряного потоку від НГ цілком розсіюється на
розгойдування чагарника або утворення хвиль на поверхні води. Крім того,
зникає вплив повітряної подушки під час висіння над майданчиками, що мають
нахил, або над вершинами пагорбів. У такому випадку індуктивний потік «скочується» під ухил, не утворює
повітряної подушки. Розрахункова тяга НГ у зоні впливу повітряної
подушки значно залежить від швидкості вітру й швидкості польоту. За швидкості
вітру 60 км/год (або Vпр = 60 км/год) вплив повітряної подушки зовсім зникає. На рис. 2.1.1
заштриховані ділянки показують зміну надлишку розрахункової тяги НГ
внаслідок впливу повітряної подушки (ΔRнг_вп)
від швидкості польоту. Зі збільшенням швидкості польоту, як бачимо з рис. 2.1.1,
розрахункова тяга зростає більш інтенсивно, ніж необхідна. Збільшення
розрахункової тяги відбувається як результат косого обдування і зменшення
втрат на цьому режимі роботи НГ. Для виконання встановленого польоту
необхідне дотримання балансу енергій, а саме, щоб потужність, створена
силовою установкою, дорівнювала потужності, потрібній для виконання польоту
на цьому режимі. Необхідною
називається потужність, яку потрібно підводити до НГ, створюючи необхідну
тягу для польоту. Зокрема, потужність, потрібна для горизонтального польоту (Nгп), – це
потужність, необхідна НГ для виконання встановленого горизонтального
польоту. Тому необхідну потужність Nгп
можна отримати, якщо врахувати витрати потужності для створення необхідної
тяги НГ у зв’язку з витратою її для створення індуктивної швидкості (υi), подолання
профільного опору обертанню лопатей НГ (Qпр) і шкідливого опору вертольота за руху (Qв):
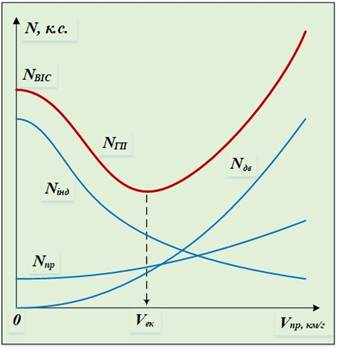
Закон зміни індуктивної потужності Nінд, профільної Nпр, потужності руху Nдв і сумарної потужності, необхідної для горизонтального
польоту, характерний для будь-якого вертольота, наведено на рис. 2.1.3.
Необхідна потужність для горизонтального польоту Nгп зі збільшенням швидкості
спочатку зменшується, а потім збільшується відповідно до характеру зміни її
складових Nінд, Nnp і Nдв.
Потужність, що розвивається силовою установкою Ne, має бути
більшою на величину непродуктивних витрат, які враховуються через коефіцієнт
використання потужності двигунів (ξм):
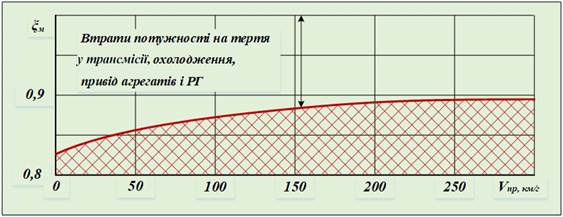
Залежність ξм
від швидкості польоту, характерна для сучасних вертольотів, наведено на рис.
2.1.4. Величина необхідної потужності для однієї і тієї самої
швидкості усталеного горизонтального польоту залежить, як і тяга НГ,
від багатьох експлуатаційних чинників: висоти, польотної маси вертольота,
варіантів озброєння і зовнішніх підвісок, вантажу, випущеного або прибраного
шасі й зовнішніх умов. Зі збільшенням висоти горизонтального польоту змінюється
масова щільність повітря і для створення однакової за величиною необхідної
тяги за однієї і тієї самої Vпр необхідна
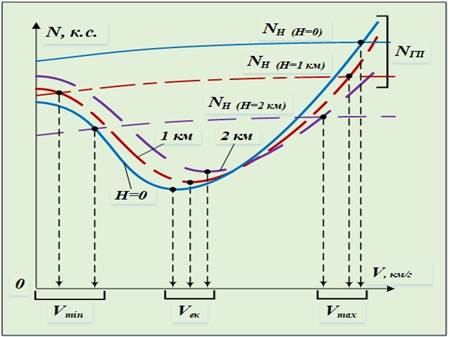
потужність збільшується: Однак зі збільшенням висоти Н за однієї і тієї самої приладової швидкості Vпр зростає
справжня швидкість польоту V
і тому графік залежності Nгп
від Н і V зсувається вгору і праворуч (рис. 2.1.5).
Наявна
потужність для НГ (Np)
– це максимально можлива потужність, яка підводиться до несучого гвинта у
процесі роботи силової установки на максимальному (злітному) режимі. Вона менше, наприклад, ефективної
злітної потужності двигуна Nе,взл на величину втрат (ΔNк) на тертя в трансмісії, примусове
охолодження і обертання РГ:
Наявна потужність Nр
зі збільшенням швидкості незначно збільшується, хоча Nе,взл від швидкості польоту не
залежить (рис. 2.1.5 і
2.1.7), оскільки зменшуються непродуктивні втрати потужності за створення
розрахункової тяги і зростає коефіцієнт втрат потужності ξм (рис. 2.1.4).
Наявна потужність змінюється від висоти польоту і температури
зовнішнього повітря так само, як і ефективна потужність двигунів під час
роботи на злітному режимі, а саме для невисотного двигуна зі збільшенням
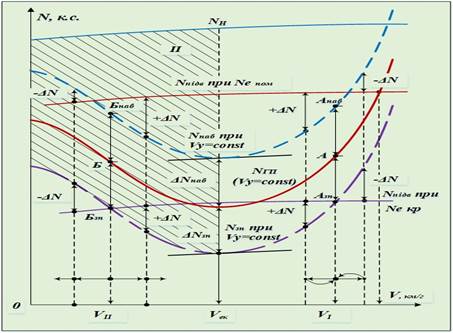
висоти польоту і температури вище розрахункової необхідна потужність падає (рис. 2.1.5 і 2.1.7, б). Потужність, що підводиться до НГ за різних значень
загального кроку НГ (φош) і проміжних режимів роботи
двигунів, називається підведеною потужністю Nподв. Підводиться до НГ потужність за
постійного режиму роботи двигунів (наприклад,
крейсерського) і постійного загального кроку НГ
підпорядковується тим самим закономірностям за зміни швидкості, висоти і
температури, що і необхідна потужність НГ. Зміни розрахункових і необхідних тяг і потужностей
обмежують мінімальні й максимальні швидкості і загалом висотно-швидкісні
властивості вертольотів. Потрібна
потужність для набору висоти Nнаб
складається (за інших
рівних умов) з необхідної потужності для горизонтального польоту
(висіння) і додаткового надлишку потужності,
що витрачається на набір висоти. Якщо задатися постійною вертикальною
швидкістю (наприклад, Vy = 2 м/с = const), потужність, що потрібна для
набору висоти як за вертикального підйому, так і руху за нахиленою
траєкторією, порівняно з потужністю, потрібною для висіння і горизонтального
польоту (за однакових
швидкостей польоту за приладом), має бути збільшена на
постійну величину ΔNнаб,
т.ч. крива потрібної потужності за набору висоти зсувається
еквідистантно вгору щодо потужності, потрібної для горизонтального польоту (рис. 2.1.6).
Використовуючи цю формулу, можна розраховувати і максимальні
вертикальні швидкості усталеного зниження під час планування на режимі
самообертання НГ, якщо відома необхідна потужність для горизонтального
польоту:
Отримувані максимальні вертикальні швидкості близькі до
практичних швидкостей.
Висінням
називається такий режим польоту вертольота, за якого його швидкість
щодо землі дорівнює нулю. За наявності вітру висіння (носом проти вітру) є горизонтальним польотом. У
такому випадку вертоліт виконує політ щодо повітряної маси зі швидкістю вітру
і НГ працює в режимі косого обтікання. Якщо вертоліт дрейфуватиме за
вітром, а саме переміщатиметься відносно землі зі швидкістю вітру, НГ
працюватиме як і у разі висіння в штиль, а саме в осьовому потоці. Режим висіння застосовують для перевірки роботи двигунів,
трансмісії, керування, а також визначення запасу потужності і центрування
перед кожним польотом. Режим висіння є одним із найскладніших за технікою
пілотування, особливо під час польоту з вимкненим автопілотом. Він вимагає
від пілота підвищеної уваги, великого фізичного напруження і чіткості в
пілотуванні.
Максимальна висота, на якій можливе виконання висіння на
вертольоті, називається статичною стелею вертольота (Нст). У характеристиках вертольотів величина Нст наводиться для нормальної
маси вертольота за стандартних атмосферних умов без урахування ефекту
повітряної подушки. Практично виконувати висіння на Нст не можна, тому що немає запасу за тягою (потужністю) і в разі будь-якого
зовнішнього впливу (або якщо буде
допущена найменша неточність у техніці пілотування) відбувається падіння обертів НГ
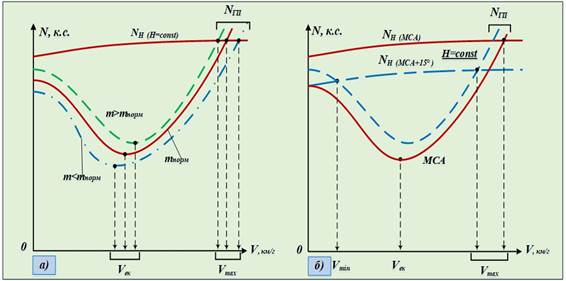
і вертоліт починає знижуватися. Якщо визначити за номограмою максимальну висоту висіння для
нормальної маси вертольота за стандартної температури зовнішнього повітря (рис. 2.1.8), то вона виявиться трохи
нижче статичної стелі вертольота. Ця висота висіння називається стелею
висіння (Нпг), де практично можна виконати
висіння поза зоною впливу повітряної подушки. Наявні при цьому запаси за
потужністю СУ і шляхового керування забезпечують необхідну безпеку
виконання висіння. Висота висіння 10–200
м над поверхнею майданчика майже для всіх вертольотів вважається небезпечною
через можливу відмову одного або обох двигунів. Тому висіння на цих висотах
можна виконувати тільки за необхідності (за зльотів і посадок на майданчиках обмежених розмірів і з високими
перешкодами на підходах, під час рятувальних робіт, польоту з вантажем на
зовнішній підвісці тощо). Таке обмеження в цьому випадку встановлено,
оскільки за відмови двигуна, з одного боку, висота недостатня для переведення
вертольота з вертикального зниження на поступальний політ, а з іншого – на
деяких вертольотах не забезпечується безпека вертикального приземлення.
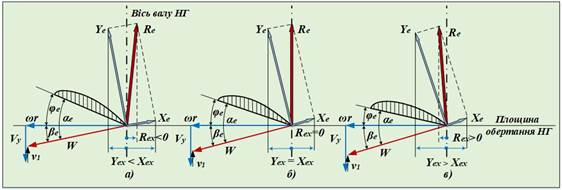
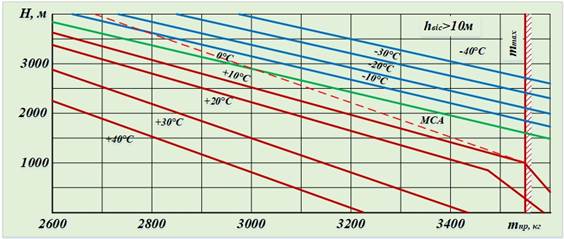
Для усталеного режиму висіння необхідно, щоб під час
пілотування пілот домагався рівноваги всіх сил і моментів (рис. 2.1.9), що діють на вертоліт.
Досягається це в процесі балансування вертольота, коли пілот відповідними відхиленнями
важелів керування усуває всякі переміщення щодо землі і зберігає висоту
висіння. При цьому вертоліт займає цілком певне положення в просторі за
креном, тангажем і курсом (напрямком) висіння. Висіння без балансування крену за середніх поздовжніх
центруваннях можливо за рахунок конструктивного нахилу осі вала НГ
праворуч або бокового зміщення центру ваги вертольота (бічне центрування) ліворуч (якщо дивитися по польоту). Однак за гранично-передніх
центруваннях для вертольотів спостерігається невеликий лівий крен (0,5–100). Виконуючи встановлене висіння, пілот відновлює порушену з
тих чи інших причин рівновагу вертольота своєчасним відхиленням важелів керування.
На висінні важелі керування займають певне балансувальне положення, що
відповідає цьому поздовжньому центруванню вертольота. Пілот безперервно
переміщує важелі керування біля цього положення, тому що вертоліт динамічно
нестійкий на вертикальних режимах і на малих швидкостях польоту. За ввімкненого автопілота техніка пілотування значно
спрощується. Потрібно уникати частих і подвійних рухів ручкою керування,
оскільки це тільки сприяє розбалансуванню вертольота на висінні. В усталеному положенні, коли вертоліт не крениться, не
піднімає і не опускає ніс, рекомендується зняти навантаження з ручки
керування тримерами. Висіння рекомендується виконувати проти вітру, тому що в
цьому випадку положення вертольота більш стійке і забезпечуються найбільші
запаси шляхового керування. Складнішим за технікою пілотування є виконання висіння в
умовах поривчастого вітру, особливо бічного і попутного, тому що, крім
дотримання наведеної вище рівноваги сил, якої пілот домагається відповідним
відхиленням важелів керування, ускладнюється витримування шляхової рівноваги
моментів і напрямку висіння.
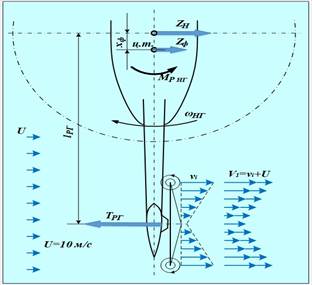
Бічний вітер
ліворуч (рис. 2.1.10). За такого напрямку вітру рульовий
гвинт працює в осьовому потоці, подібно несучому гвинту за вертикального
підйому.
За збільшення швидкості вітру зліва зменшуються кути атаки елементів
лопатей. Пілот, щоб зберегти або навіть збільшити тягу НГ, має зі
зростанням швидкості вітру зліва збільшувати кут установки лопатей РГ.
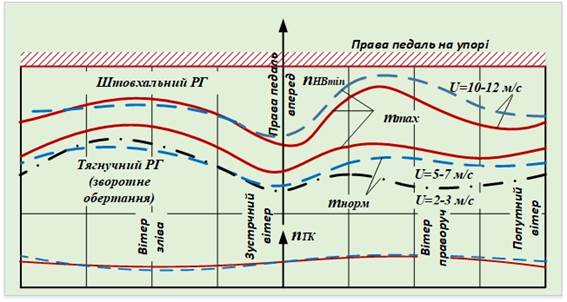
Незважаючи на це, потужність, потрібна для обертання РГ, майже не
змінюється (рис. 2.1.11), тому що в процесі
відновлення шляхової рівноваги зменшення кута атаки елементів лопатей НГ
від бокового вітру компенсується збільшенням кутів установки лопатей
приблизно на таку саму величину, і вони працюють на тих самих кутах атаки, що
і у разі висіння в штиль.
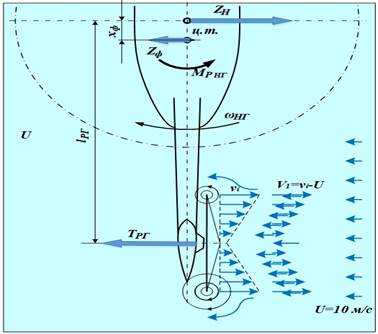
Боковий вітер
праворуч (рис. 2.1.12). За вітру праворуч РГ
працює в осьовому потоці, подібно НГ за вертикального зниження. За
збільшення швидкості вітру кути атаки елементів лопатей РГ
збільшуються. Здавалося б, закономірний висновок, що, якщо кути атаки
збільшуються, слід менше відхиляти вперед праву педаль за висіння з бічним
вітром праворуч. Дійсно, для деяких вертольотів за невеликих швидкостей
бічного вітру праворуч (2–3 м/с) спостерігається зменшення
потрібного балансування ходу вперед правої педалі, порівняно з висінням у
штиль і зустрічним вітром за інших рівних умов (рис. 2.1.11). Поведінка вертольота за висіння з бічним вітром праворуч,
коли швидкість вітру близька до допустимого значення, а маса вертольота
гранична Мпр, дуже
нестійкий: у разі випадкового збільшення швидкості вітру праворуч вертоліт
прагне розвернутися не праворуч (носом проти
вітру), а навпаки, – ліворуч (хвостом на вітер). Щоб утримати напрямок за висіння з боковим вітром
праворуч, пілотові доводиться постійно виконувати подвійні рухи педалями, при
цьому можливе встановлення педалі на упор. Основною причиною можливої втрати шляхової стійкості
вертольота на висінні з правим боковим вітром є падіння тяги РГ через
зрив потоку з лопатей і втрат на вихроутворення за такого осьового обдування,
особливо за знижених обертів НГ. На висінні в умовах, коли швидкість бічного вітру перевищує
допустиме значення за Керівництвом з льотної експлуатації екіпажу, за
встановлення правої педалі на упор можливе таке високе додаткове збільшення
необхідної потужності на обертання РГ (через зрив потоку з лопатей), що оберти НГ
падають, додатково зменшується Трг
і вертоліт входить у так званий мимовільний розворот ліворуч. Отже, щоб виключити самовільний
розворот вертольота ліворуч (в бік дії
реактивного моменту НГ), в Керівництві з льотної експлуатації
даються обмеження за швидкістю бічного вітру, завдяки чому передбачається
певний запас до критичної швидкості вітру і забезпечуються запаси зі
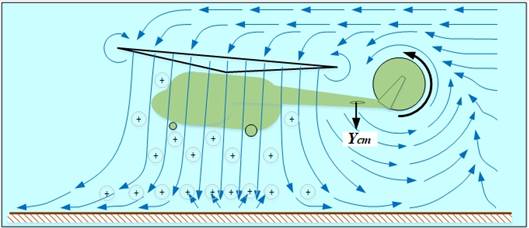
шляхового керування. Попутний вітер. За попутного вітру на висінні вертоліт у шляховому
відношенні нестійкий. Зазвичай, він прагне розвернутися ліворуч. На висінні
без переміщення вертольота відносно землі в зоні впливу повітряної подушки
вихор, утворений взаємодією потоку НГ і вітру (рис. 2.1.13), створює умови, в яких
штовхає РГ, «набігає» на хвостову балку, втрачає
частину тяги внаслідок зменшення відносної швидкості обтікання лопатей і виникнення
зриву потоку. Тому за висіння з попутним вітром спостерігається збільшення
необхідного відхилення вперед правої педалі (рис. 2.1.13). Для зменшення відхилення педалі на деяких сучасних
вертольотах змінено напрямок обертання РГ, що збільшило запаси по ходу
правої педалі за висіння з правим і попутним вітром.
Режим вертикального підйому
є, як і висіння, одним із напружених режимів роботи НГ. Для його
виконання потрібна більша потужність, ніж для висіння. Цей режим є одним з
основних елементів зльоту по-вертолітному. Особливо значний за тривалістю
вертикальний підйом виконується в процесі зльоту з майданчиків, оточених
високими перешкодами. Вертикальний підйом може застосовуватися і як маневр
для огляду місцевості у разі дії вертольотів із засідок, коли виходити вперед
і зближуватися з противником недоцільно.
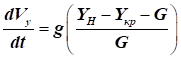
Для початку вертикального підйому необхідно, щоб на висінні
пілот збільшив загальний крок НГ і тяга стала більше, ніж потрібно для
виконання висіння, а саме, щоб
Але як тільки почне збільшуватися вертикальна швидкість, з’явиться
додаткова сила шкідливого опору вертольота, яка буде спрямована донизу. Крім
того, зменшиться підіймальна сила Ту,
тому що зменшаться кути атаки елементів лопатей НГ. Отже, зі
збільшенням вертикальної швидкості зменшуватиметься перевантаження (пу), яка за певної вертикальної
швидкості дорівнює пу =
1. Фізично це означає, що прискорення не буде Максимальний надлишок потужності можна отримати поблизу
землі (на рівні моря) за роботи двигунів на
злітному режимі. З підйомом на висоту максимальний надлишок потужності
зменшується, тому що необхідна потужність НГ падає, а потужність,
потрібна для висіння, зростає. Тому під час підйому максимальна вертикальна
швидкість зменшується. На висоті статичної стелі вона дорівнюватиме нулю. Отже, сталий режим вертикального
підйому можливий після відповідного вертикального розгону вертольота до
заданої вертикальної швидкості. Надалі для дотримання умов сталого польоту
необхідно витримувати вертикальну швидкість постійною. Витримування
вертикальної швидкості вимагає переміщення важеля загального кроку НГ
тільки за тривалого виконання підйому, тому що зі збільшенням висоти
порушується рівновага сил. Крім того, це можливо тільки доти, поки є запас
потужності двигунів. У міру зменшення запасу (надлишку) потужності подальший вертикальний підйом сповільнюється
і вертикальна швидкість поступово зменшується. Для того щоб припинити вертикальний підйом за підходу до
заданої висоти висіння, необхідно плавно зменшити загальний крок НГ і
погасити вертикальну швидкість до нуля. Отже, щоб виключити потрапляння вертольота в самовільне
зниження за вертикального підйому, пілоту необхідно виконувати рекомендації
за темпом переміщення важеля «крок-газ» і контролювати зміну обертів
НГ, не допускаючи їх зменшення.
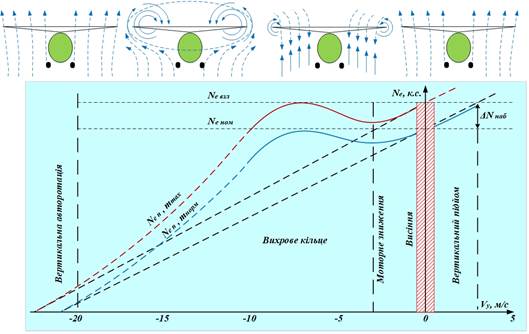
За вертикального зниженні вертольота з працюючими двигунами
є низка специфічних особливостей, пов’язаних із роботою НГ. В
аеродинаміці виокремлюють три основні режими роботи НГ. Отже,
розрізняють і три режими зниження вертольота (рис. 2.1.14): моторне зниження, вихрове кільце і вертикальна
авторотація. Режим
моторного зниження – це усталене зниження вертольота з малими
вертикальними швидкостями (до 4 м/с), коли НГ працює в умовах,
що майже не відрізняються від висіння. Цей режим виконується, зазвичай, за
значень загального кроку НГ, менших, ніж на висінні, при цьому двигуни
працюють на потужності меншій, ніж потрібно для висіння. Цей режим зниження широко використовують і він є одним з
основних елементів посадки по-вертолітному, тому що дає змогу виконувати як
усталене зниження (Vy =
const), так і керування вертикальною швидкістю зниження.
Вертикальна швидкість зниження залежить від ступеня
зменшення загального кроку НГ і потужності двигунів. Цей режим унаслідок
великої вертикальної швидкості і можливості (за нестачі потужності) потрапляння вертольота в
нестале мимовільне зниження, а також через збільшене вертикальне зниження за
гасіння вертикальної швидкості й велике збільшення потрібної потужності на
обертання НГ в льотній практиці експлуатації вертольотів заборонений.
Однак у режим вихрового кільця можна потрапити ненавмисно за деяких помилок
пілота в техніці пілотування під час зльоту, посадки й маневрування на
мінімально допустимих швидкостях і вертикальних режимах.
Цей режим унаслідок великої вертикальної швидкості зниження
та труднощів у точному визначенні моменту виконання «підриву» для гасіння вертикальної
швидкості є небезпечним і для вертольотів заборонений. Однак нестале
вертикальне зниження на режимі самообертання НГ вимушено виконується
за відмови двигунів на висінні та вертикального підйому (в небезпечній зоні висіння 10–200 м), коли пілот практично не в
змозі перевести вертоліт на поступальний політ уперед.
Для початку вертикального зниження необхідно, щоб на
висінні зменшилася підіймальна сила НГ і стала за величиною менше сили
тяжіння вертольота. При цьому вертикальне прискорення і величина в дужках
буде від’ємною.
Але як тільки почне збільшуватися вертикальна швидкість
зниження, відбудеться деяке відновлення підіймальної сили внаслідок
збільшення кутів атаки елементів лопатей НГ. Виникає
особливість за сталого зниження, незважаючи на те, що кут установки (φош) менше, ніж на висінні,
потужність двигунів потрібна бути великою (оберти ротора турбокомпресора більше). Це необхідно враховувати,
тому що за певних умов вертикального зниження двигуни можуть працювати на
злітній потужності (Ne,взл)
(наприклад, на рис. 2.1.14 за mмакс , nнв =
const, Neп = Neвзл; Vy = 7м/с). Для виконання вертикального зниження з працюючими двигунами
(наприклад, з висіння) необхідно зменшити тягу НГ (Ту). У такому випадку важіль «крок–газ» плавно переміщається донизу із таким розрахунком, щоб не
допустити збільшення швидкості більш допустимої за Керівництвом з льотної
експлуатації або більше заданої (наприклад, понад 2 м/с). При цьому слід координовано
відхилити вперед ліву педаль і ручку керування ліворуч, щоб зберегти заданий
напрямок, не допустити бічних зсувів і чітко витримати вертикальність
траєкторії зниження. Для припинення вертикального зниження треба збільшити силу
тяги НГ, до того ж за величиною вона має бути більше сили тяжіння вертольота
(Ty > G). Тільки в цьому випадку
з’явиться позитивне вертикальне прискорення і почне зменшуватися вертикальна
швидкість. Зазвичай, загальний крок НГ встановлюється навіть
трохи більшим, ніж на висінні, і коли вертоліт повністю зупиниться, повертається
в положення, відповідне висінню. За зниження, коли НГ працює в режимі вихрового
кільця, внаслідок утворення зон зриву потоку в районі перерізів лопатей (кути атаки елементів лопатей
близькі до критичних значень) і через значні втрати на
вихроутворення на кінцях лопатей, а також через велику турбулентність самого
вихрового кільця поведінка вертольота дуже нестійка.
Якщо збереження обертів НГ не забезпечується,
можливе подальше самовільне збільшення вертикальної швидкості зниження аж до
швидкостей, близьких за величиною до швидкостей зниження на режимі
вертикальної авторотації. За зниження вертольота на режимі вертикальної
авторотації аеродинамічні сили надають обертання НГ, що виникають
як результат взаємодії лопатей із повітрям за зменшення висоти польоту (витрачання потенційної енергії
вертольота).
З рис. 2.1.15 бачимо, що для збереження обертів НГ
у допустимих межах (після вимкнення
двигунів або їх відмови) необхідно зменшити загальний крок НГ. Властивості самообертання НГ залежатимуть від
властивостей самообертання кожної окремої лопаті. Тому пілот, зменшуючи кут
установки (загальний крок) НГ, створює необхідні
умови для самообертання лопатей. За переміщення важеля загального кроку донизу НГ
переходитиме від уповільненого самообертання до прискореного. У принципі
можна за вертикального зниження на режимі самообертання, змінюючи загальний
крок НГ, встановлювати певні оберти, і цьому режиму зниження
відповідатиме цілком стала швидкість вертикального зниження (в межах 17–25 м/с). За зменшення загального кроку НГ (до упору) число обертів не буде
зростати безмежно, тому що зі зростанням вертикальної швидкості потужність,
що підводиться до НГ, збільшується і під час створення підіймальної
сили НГ, що дорівнює за величиною силі тяжіння, вертикальна швидкість
стабілізується. Підведення потужності від повітряного потоку стає постійним,
і оберти більше не збільшуються. Однак за такої сили тяжіння вертольота це
буде максимальна вертикальна швидкість зниження. За збільшення загального кроку НГ (від мінімального значення) оберти НГ дещо
падають. При цьому зменшується і вертикальна швидкість зниження. Рух знову
стане сталим. З цього, звичайно, не випливає, що можна збільшувати загальний
крок НГ до будь-якого його значення і завжди при цьому отримувати
меншу вертикальну швидкість Vу
і відновлення обертів. Навпаки, передчасно завантажувати НГ небезпечно,
тому що це призведе до різкого його гальмування з одночасним збільшенням
вертикальної швидкості зниження. На режимі самообертання НГ підводиться потужність до
трансмісії і рульового гвинта і на вертоліт від НГ передається крутний
момент, який розвертає вертоліт праворуч. Рульовий гвинт має створювати силу
тяги і відповідний момент для врівноваження крутного моменту. У такому
випадку пілот відхиляє вперед ліву педаль і водночас ручку керування ліворуч,
тому що сила тяги РГ, як порівняти з висінням, буде спрямована
праворуч (якщо дивитися
за польотом), а сила, що її врівноважує Tz, має бути спрямована ліворуч, щоб не було
бічних зсувів. Крім того, за вертикального зниження на режимі авторотації НГ
пілоту необхідно ще враховувати недостатній шлях гасіння вертикальної
швидкості в процесі виконання «підриву». Щоб зробити умови виконання «підриву» більш оптимальними з погляду забезпечення безпеки
приземлення пілот має (якщо є така
можливість) переводити вертоліт на розгін поступальної
швидкості в бік, вільний від перешкод. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 .
. .
.
 .
.