|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
||||||||||||||||||||||||||||||||||||
|
1. РІВНОВАГА, СТІЙКІСТЬ І КЕРОВАНІСТЬ
ЛІТАЛЬНИХ АПАРАТІВ |
|||||||||||||||||||||||||||||||||||||||
|
У процесі маневрування вертольота пілот, зазвичай,
безперервно переміщує важелі керування, домагаючись необхідної величини і
напрямків аеродинамічних сил, щоб забезпечити необхідну зміну руху
вертольота. У сталому польоті пілот прагне витримати прямолінійний і
рівномірний політ вертольота, для чого зберігає незмінним відповідне
положення важелів керування, незначно і короткочасно відхиляючи їх лише для
парирування збурень, що виникають. 1. Сталому режиму польоту відповідають положення важелів,
органів керування і величини кутів просторового положення вертольота. Для збільшення швидкості польоту необхідне зростання тяги НГ.
Знаючи зв’язок між величиною загального кроку і тягою, що створюється НГ,
можна визначити значення загального кута установки НГ (φош) на цій швидкості і його
зміни залежно від швидкості польоту. Балансувальні відхилення важелів керування вертольотом
змінюються за зміни швидкості, висоти польоту, польотної маси вертольота,
варіантів підвісок тощо, оскільки від цих чинників залежать величини
аеродинамічних сил і їх моментів. Істотно впливає на балансування і центрування вертольота.
За зміни поздовжнього центрування змінюється плече сили НГ (Тнг) і її поздовжній момент.
Отже, щоб забезпечити рівновагу моментів, за зміни центрування необхідно
відновити величину плеча сили НГ (Тнг) зміною балансування положення
ручки керування. Це призведе до порушення рівноваги щодо інших осей і до відповідної
зміни балансувальних положень інших важелів керування вертольотом. Залежність балансувальних положень важелів (органів) керування вертольотом від
швидкості польоту називається балансувальними кривими. Ці залежності
будуються для кожного встановленого режиму польоту і різних значень основних
експлуатаційних чинників. Вони повністю характеризують умови рівноваги
вертольота за відхиленнями важелів поздовжнього, поперечного і шляхового
керування, загального кроку і самого вертольота в просторі. Балансувальні
криві дають змогу визначити запаси керування, кути тангажу, крену і ковзання
вертольота на різних режимах польоту, а також характеристики стійкості і
керованості. Балансувальні криві отримують розрахунково, але потім
обов’язково коригують їх за результатами льотних випробувань. Балансувальні криві зазвичай об’єднують у вигляді графіків (діаграм) поздовжнього і бічного
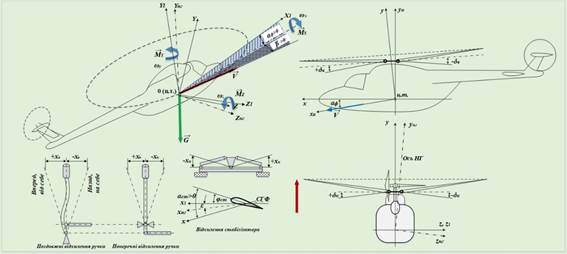
балансування відповідно до розподілу видів руху вертольота і керування. На рис. 1.3.1 наведено способи балансування і
правило знаків моментів. Характер перебігу балансувальних кривих за швидкістю в
експлуатаційному діапазоні швидкостей польоту для всіх одногвинтових
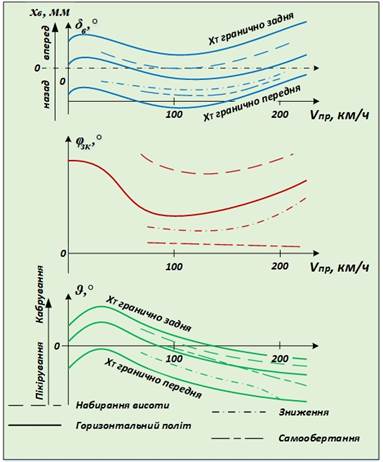
вертольотів практично однаковий. На рис. 1.3.2 показаний характерний вид кривих
поздовжнього, а на рис 1.3.3, 1.3.4 – бічного балансування. 2. Поздовжнє балансування вертольота характерне на
більшій частині діапазону швидкостей польоту залежно від балансування
положення ручки керування (хв) за швидкістю польоту. Для
витримування більшої швидкості потрібно більше переднє положення ручки
керування. Фізично це пояснюється збільшенням кута природного завалу конуса (а1) в міру збільшення швидкості
польоту. Збільшення кута природного завалу конуса (а1) доводиться долати збільшенням
керованого завалу від автомата перекосу, відхиляючи його кільце (δв) ручкою керування вперед. Це
свідчить про статичну стійкість вертольота за швидкістю (
У діапазоні швидкостей 30–90 км/ч балансувальні положення
ручки керування за швидкістю мають зворотний характер – на більшій швидкості
ручка займає більш заднє положення. Для початку розгону з будь-якої швидкості
польоту пілотові слід віддати ручку від себе. При цьому збільшиться нахил
сили Тнг (і вертольота) вперед, отже, збільшиться
складова пропульсивної сили НГ Тх,
що спричинить збільшення швидкості. За підходу до швидкості 70 км/год і для витримування
її необхідно ручку керування взяти на себе і тримати в положенні більш
задньому, ніж на швидкості 30
км/год. Подібний перебіг балансувальних кривих свідчить про
статичну нестійкість вертольота за швидкістю ( Це пояснюється переважно виходом стабілізатора зі струменя НГ
і різким зменшенням його кабруючого моменту за збільшення швидкості польоту
понад ~ 30 км/год. Крім
того, позначається і на зменшенні кута установки для збільшення швидкості до
економічної швидкості.
Характерно, що балансування кута тангажу в міру зростання
швидкості весь час зменшується, вертоліт опускає ніс. Це пояснюється
необхідною для балансування зміною поздовжніх сил і взаємодією поздовжніх
моментів, що діють на вертоліт. Найбільший позитивний кут тангажу відповідає
горизонтальному польоту на малих швидкостях (20–30 км/ч) і за гранично-задніх центрувань. Зумовлено це
переважно впливом стабілізатора, розташованого в індуктивному потоці від НГ.
За зміщення центрування вертольота вперед момент від сили НГ (Тнг) змінюється на пікірування, а за зсуву назад – на
кабрування. Для компенсації цього явища, відповідно, відхиляється ручка
керування на себе (за ΔxТ > 0), або від себе (за ΔxТ <0). За зміни поздовжнього центрування балансувальні
криві зміщуються догори або донизу практично еквідистантно.
Аналізуючи балансувальні криві для горизонтального польоту,
можна дійти висновку, що мінімальні запаси з відхилення ручки керування
вперед виходять на максимальних швидкостях і за гранично-задніх центрувань. Використовуючи балансувальні криві за кутом тангажу, можна
визначити кути атаки вертольота на тому чи іншому режимі польоту. Закон зміни
балансування значення загального кроку НГ за швидкістю польоту
аналогічний для всіх вертольотів (до Vек величина (φош) зменшується, а потім збільшується).
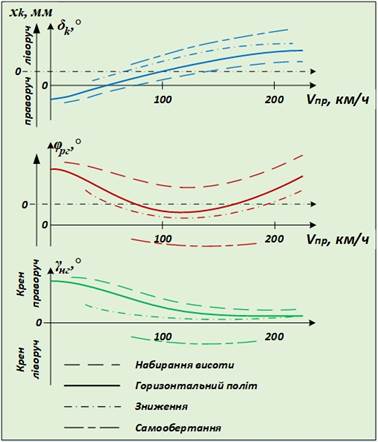
3. Бічне балансування охоплює поперечне і шляхове балансування. Для сталих
режимів польоту без ковзання балансувальні криві наведено на рис. 1.3.3,
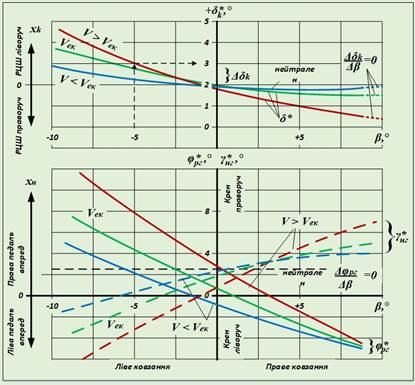
а для сталого горизонтального польоту з ковзанням – на рис. 1.3.4. З
цих графіків бачимо, що для всіх вертольотів одногвинтової схеми з прийнятим
напрямком обертання НГ на висінні і малих швидкостях польоту
характерна наявність правого крену. Це пояснюється необхідністю відхилення
сили НГ (Тнг) від осі вала НГ
праворуч для отримання складової НГ (Тz), внаслідок чого на втулці виникає момент крену
вправо Отже, одногвинтові вертольоти під час польоту без ковзання завжди мають
певний крен, а під час польоту без крену повинні мати невелике ковзання. Найбільше потрібне значення кроку РГ (φрв) відповідає висінню. У вертольотів
із кілем зростання кроку РГ (φрв)
за V > Vек значно менше, ніж без кіля. Для забезпечення рівноваги під час виконання встановленого
польоту з ковзанням у всіх вертольотів характерно відхилення ручки керування
в бік ковзання і крену, а протилежної педалі – вперед. Вертольоти на більшості режимів польоту є нестійкими літальними
апаратами. Вертоліт не в змозі самостійно зберігати сталий режим польоту в
умовах діючих різних збурень. Основними причинами цього є незадовільні
статичні характеристики стійкості і слабке демпфування. Тому пілот у польоті
змушений постійно впливати на важелі керування, забезпечуючи створення
необхідних сил та їх моментів, під впливом яких вертоліт зберігає заданий
режим польоту. Пілотування вертольота, особливо на тих режимах, де він
найбільш нестійкий, відволікає увагу пілота. Найбільш повне і радикальне вирішення зазначених проблем
забезпечується за використання спеціальних автоматичних пристроїв, що
поліпшують пілотажні характеристики вертольотів і допомагають пілоту в
пілотуванні вертольота. До таких пристроїв належать автопілот (АП) або системи автоматичного
управління (САУ).
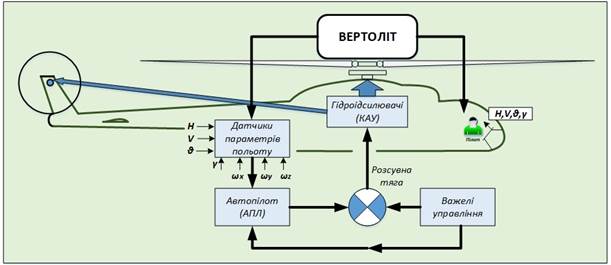
Автопілот на вертольотах вмикається в систему управління з
так званою диференціальною схемою (рис. 1.3.5), коли команди від АП
реалізуються за допомогою «розсувної тяги». Ця схема увімкнення
забезпечує роботу АП в єдиному ланцюзі керування разом із пілотом. При
цьому органи керування вертольотом відхиляються за командами автопілота
незалежно від пілота, щоб підтримати встановлений режим польоту. Команди автопілота формуються на основі інформації від
датчиків, що сприймають відхилення від заданого положення вертольота і
швидкості зміни цих відхилень (Δυ), а іноді і прискорення (Δυ).
Як результат вертоліт із увімкненим автопілотом набуває нової
якості – стійкість власного руху за кутами відхилення фюзеляжу. При цьому
пілот може втрутитися в керування в будь-який інший час після цього
відхилення важелів керування, змінюючи режим польоту і водночас задаючи
автопілоту нові значення параметрів польоту, які необхідно підтримувати. Постійна робота автопілотів, спрямована на гасіння
відхилень від заданого режиму польоту, забезпечує суттєве підвищення
характеристик демпфування вертольота. Крім того, у разі керування з АП,
які мають закон регулювання типу, збільшується ефективність керування. Це
досягається за допомогою так званих компенсаційних датчиків, що забезпечують
центрування рульових машин на різних режимах польоту (тобто відповідно до різних
положень важелів керування). Уведений в автопілот сигнал положення важеля керування
призводить до додаткового (щодо АП) збільшення відхилення органу
керування пропорційно величині переміщення важеля. Отже, керуючи вертольотом із увімкненим автопілотом, пілот сприймає його
як стійкий літальний апарат з якісними характеристиками керованості. Диференційна схема ввімкнення рульових машин автопілотів
дає змогу обмежити хід виконавчих штоків величиною не більше 20% повного діапазону
відхилення важелів керування. Це виключає появу небезпечних ситуацій у
польоті за відмови автопілота, оскільки у пілота завжди залишається запас
керування для парирування впливу відмови системи навіть у разі уходу штоків
рульових машин у крайнє положення. Завдяки цьому на сучасних вертольотах АП забезпечують простоту пілотування на всіх експлуатаційних
і критичних режимах у простих і складних метеорологічних умовах польоту вдень
і вночі. Точність витримування заданого кутового положення вертольота за
креном, тангажем і курсом у спокійній атмосфері у сучасних автопілотів
становить ± (0,5–1,00).
Для контролю і стабілізації кутового положення вертольота і
переходу до автоматичного керування створюються системи автоматичного
керування (САУ), складовою частиною яких є
автопілот. Автопілот у САУ забезпечує роботу внутрішнього контуру
керування за кутами просторового положення вертольота. Інші елементи САУ
забезпечують автоматичне виконання заданої траєкторії руху. Для цього САУ
має додатково сприймати елементи, що дають інформацію про параметри
траєкторії, обчислювальні пристрої, що виробляють командні сигнали, та інші
елементи, що забезпечують введення цих сигналів у відповідні канали
автопілота і системи керування вертольотом (рис. 1.3.6).
Для полегшення і підвищення якості роботи пілота під час
виконання різних завдань необхідно використовувати можливості САУ з
узагальнення свідчень пілотажно-навігаційних приладів і виконання складних
розрахунково-логічних операцій. Тому натепер для вітчизняних і зарубіжних вертольотів
розробляють системи комплексного напівавтоматичного (директорного) керування, що розширюють
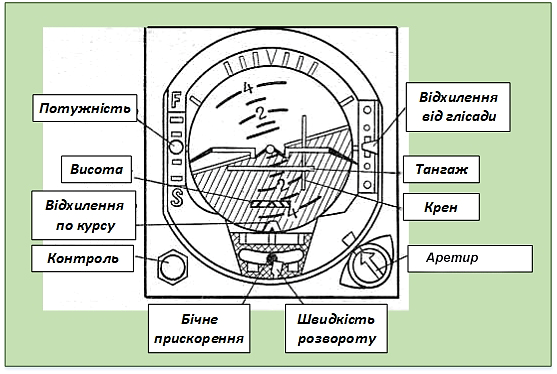
сферу використання САУ. За директорного керування результати
автоматичного виконання складних завдань, покладених на САУ, видаються
подібно до командних сигналів не в автопілот, а на директорній стрілці
командно-пілотажного приладу (КПП). Зовнішній вигляд КПП
наведено на рис. 1.3.6. Пілот пілотує вертоліт, керуючись цими
командами, а також з огляду на іншу інформацію, яка не вводиться в САУ.
КПП вказує пілоту, куди і як відхиляти важелі керування вертольотом,
щоб виконати оптимальний у таких умовах маневр, розрахований САУ з урахуванням встановлених обмежень (за перевантаженням,
темпом узяття кроку тощо). У цьому і полягає відмінність директорного керування від
звичайної приладової або візуальної індикації, коли пілот спостерігає
відхилення від заданих значень за кутовим положенням вертольота або за
траєкторією руху і має самостійно виконувати завдання вибору оптимального
маневру. Вказівки КПП доповнюються інформацією про траєкторії
руху щодо землі в плані, яка видається на індикатор, де показуються курс,
дальність і бічне ухилення. Крім того, пілот може використовувати звичайні
пілотажно-навігаційні прилади для контролю повітряної швидкості і висоти
польоту, вертикальної швидкості тощо.
Пілотування вертольотів, обладнаних автопілотами, здійснюється,
зазвичай, із увімкненим автопілотом або САУ. Автопілот значно спрощує
пілотові витримування встановленого польоту і маневрування. Під час польоту
із увімкненим автопілотом не потрібні подвійні знакозмінні переміщення ручки
керування і педалей, які притаманні всім, особливо одногвинтовим,
вертольотам. Автопілот, відхиляючи автомат перекосу, виконує за пілота ці
подвійні попереджувальні рухи в керуванні, необхідні для парирування збурень
і стабілізації параметрів руху вертольота. Спроби втручання пілота в
керування короткоперіодичних збурених рухів вертольота ускладнюють виконання
автопілотом його функцій і можуть навіть на деяких режимах польоту сприяти
розгойдуванню вертольота. У разі випадкового зовнішнього впливу автопілот набагато
раніше пілота реагує на зміну параметрів руху, витримуючи заданий режим
польоту. Тому автопілот, створюючи керуючі впливи, практично не дає
розвиватися збуреному руху. Залежно від характеру виконуваного польоту пілот охоплює
тільки ті канали автопілота (САУ), які забезпечують виконання
цього режиму. Зокрема, канали керування за креном і тангажем пілот вмикає на
землі перед зльотом, канал напрямку – на будь-якому сталому режимі польоту,
канали швидкості й висоти вмикають, зазвичай, за тривалих польотів маршрутом. Виконання зльоту (висіння) і посадки із увімкненим
автопілотом значно спрощується. На висінні автопілот стабілізує вертоліт за
кутом крену, тангажу, а за звільнених педалей – за курсом. Збалансований
вертоліт може навіть деякий час виконувати висіння з «кинутим» управлінням, дрейфуючи за
вітром. Однак звільняти важелі керування на висотах менше ніж 50 м не рекомендується в
інтересах забезпечення безпеки польоту на випадок можливої відмови
автопілота. Особливо уважним пілот має бути, виконуючи висіння із
увімкненим автопілотом поблизу поверхні землі (0,5–1 м). У разі відмови автопілота
вертоліт може встигнути відхилитися за креном і тангажем на кут більше ніж 150 до того, як
пілот встигне ефективно втрутитися в керування, якщо врахувати час реакції
пілота (≈ 0,3 с) і
час переміщення ручки керування в крайнє положення (≈ 0,5 с).
Це призведе до торкання (удару) основним колесом, лопатями НГ
або хвостовою опорою об землю зі зміщенням і, зазвичай, подальшим перекиданням
вертольота. У сталому польоті зі звільненим керуванням вертоліт
зберігає режим польоту (за увімкнених
каналів автопілота – крен, тангаж, напрямок), поступово змінюючи задану швидкість, що викликано,
переважно, неточністю балансування і зміною центрування через вироблення
палива. Фактично, в цьому випадку автопілот стабілізує лише кути тангажу,
крену і курсу. За тривалих польотів, коли вмикається канал швидкості,
витримується задана швидкість польоту за допомогою деяких змін кута тангажу.
Під час польоту в умовах бовтанки пілотові доводиться періодично відновлювати
заданий режим польоту або відхиленням важелів керування, або за допомогою
рукояток центрування на пульті керування автопілотом. В іншому випадку
можливий вихід на упор штоків рульових машин і від автопілота на органи
управління не зможуть надходити сигнали. У разі переходу з одного режиму на інший (в процесі маневрування) із увімкненим автопілотом і
звільненим ножним керуванням у момент переміщення ручки керування за креном,
зазвичай, виникає сильне ковзання, оскільки автопілот прагне витримати
заданий йому курс польоту. Це ковзання призводить до значних навантажень
рульового гвинта і хвостової балки. Тому необхідно стежити, щоб у процесі
введення в маневр ноги були на педалях (підпедальниках) до виникнення ковзання, що призводить до узгодження
курсової системи за звільнених педалей. Натискаючи на підпедальники, автопілот каналом напрямку
працює в режимі узгодження за курсом, але при цьому залишається 50% ходу рульової машини для
демпфування. Це істотно полегшує пілотування вертольота, особливо на висінні
і малих швидкостях польоту. Якщо в польоті із увімкненим автопілотом з’являється
постійно діюче на вертоліт збурення, наприклад унаслідок зміни
метеорологічних умов, польотної маси тощо, стрілки індикаторів можуть
установитися поблизу упорів. У цьому випадку ручками центрування необхідно
встановити стрілки індикаторів і розсувні тяги в нейтральне положення. Це
особливо важливо виконати перед вимкненням автопілота або будь-якого каналу в
польоті. Невиконання зазначеної умови може призвести в момент вимикання АПЛ
(каналу) до різкого відхилення
вертольота, оскільки розсувні тяги швидко повертаються в нейтральне
положення. Важливо враховувати необхідність встановлення стрілки індикатора в
нейтральне положення під час виконання розгону, коли, зазвичай, стрілка
каналу тангажу стає на упор. У разі потрапляння в зону сильної турбулентності доцільно
вимкнути канали напрямку й висоти, залишивши увімкненими тільки канали крену
і тангажу, що значно знизить навантаження на НГ і виключить випадкове
зменшення його обертів за знакозмінних переміщень важеля загального кроку. У разі відмови автопілота за каналами напрямку, висоти або
швидкості можна вимкнути лише той канал, що відмовив, залишивши інші
ввімкненими. У разі відмови автопілота екіпаж негайно позбавляється всіх
переваг у пілотажних характеристиках вертольота, що забезпечуються АП. |
|||||||||||||||||||||||||||||||||||||||