|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
1. РІВНОВАГА, СТІЙКІСТЬ І КЕРОВАНІСТЬ
ЛІТАЛЬНИХ АПАРАТІВ |
||||||||||||||||||||||||||||||||||||||||||||||||||||
За зовнішнього впливу в поздовжньому русі вертольота
спочатку можуть виникнути (окремо або одночасно) відхилення за кутом атаки
або величиною швидкості польоту. У сталого вертольота ці відхилення після
припинення збурень з часом зникають, і вертоліт відновлює вихідний режим
польоту, а саме швидкість, кут атаки, перевантаження тощо.
Під статичною
стійкістю за кутом атаки розуміють початкову тенденцію вертольота за
випадкової зміни кута атаки повернутися під дією аеродинамічних сил і їх
моментів до вихідного його значення. Для цього необхідно, щоб за збільшення
кута атаки на величину Δα>
0 (наприклад, у
разі потрапляння вертольота у висхідний потік) виникав додатковий
пікіруючий момент, який прагне зменшити кут атаки, і навпаки. Отже, якщо за
виникнення кута атаки Δα>
0 збільшення результуючого поздовжнього моменту негативне – Мz <0, вертоліт
має статичну стійкість за кутом атаки. Позитивна величина похідної Маz> 0 свідчить
про нестійкість, а нульове значення Maz
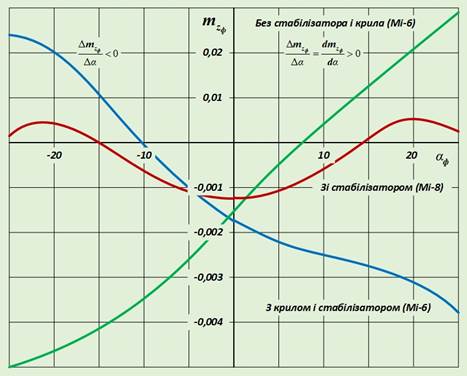
= 0 – про нейтральність за кутом атаки. Результуючий (головний, сумарний) поздовжній момент
складається з моментів аеродинамічних сил НГ, фюзеляжу, крила і
стабілізатора:
Для вивчення питання про статичну стійкість за кутом атаки
вертольота загалом, необхідно оцінити взаємну зміну поздовжніх моментів, що
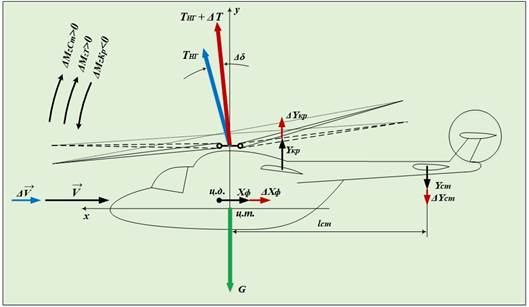
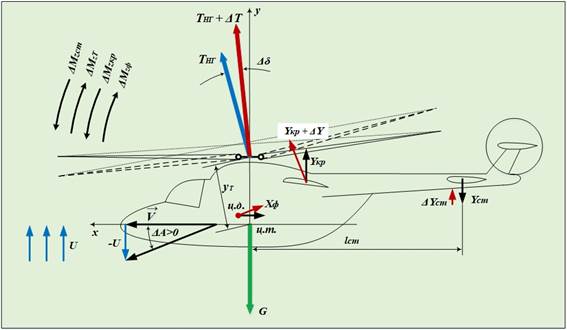
призводять до зміни результуючого моменту. Несучий гвинт сприяє статичній нестійкості вертольота за кутом
атаки у всьому діапазоні швидкостей польоту вперед. За збільшення кута атаки НГ результуюча сила Tнг відхиляється
назад і дає приріст
Фюзеляж вертольота (без стабілізатора) також сприяє статичній
нестійкості за кутом атаки в усьому діапазоні швидкостей польоту. Центр тиску
(ц. т.) фюзеляжу вертольота
зазвичай розташовується попереду центру мас (ц. м.) вертольота. Тому за збільшення кута атаки
з’являтиметься додатковий позитивний момент, що сприяє подальшому збільшенню
кута атаки (рис. 1.2.2). Стабілізатор сприяє підвищенню статичної стійкості
вертольота за кутом атаки. За збільшення кута атаки вертольота зростає і
місцевий кут атаки стабілізатора, і навпаки. Як результат відповідної зміни підіймальної сили
стабілізатора Yст
створюється додатковий момент, спрямований на відновлення вихідного кута
атаки, тобто Крило на тих вертольотах, де його
встановлено позаду центру мас, теж (аналогічно
стабілізатору) сприяє підвищенню статичної стійкості вертольота за
кутом атаки. Випадкове збільшення кута атаки сприяє додатковому збільшенню
підіймальної сили крила Yст
і створює відносно центру мас додатковий пікіруючий момент, тобто
За випадкового збільшення (зменшення) кута атаки зміна моментів від НГ і фюзеляжу сприятиме
подальшому збільшенню (зменшенню) кута атаки, створюючи
статичну нестійкість, а зміна моментів від стабілізатора і крила, навпаки,
зменшуватиме (збільшуватиме) кут атаки, а саме сприятиме
відновленню кута атаки (рис. 1.2.3). На тих швидкостях, де моменти від крила і стабілізатора
змінюватимуться на велику величину, ніж моменти від НГ і фюзеляжу,
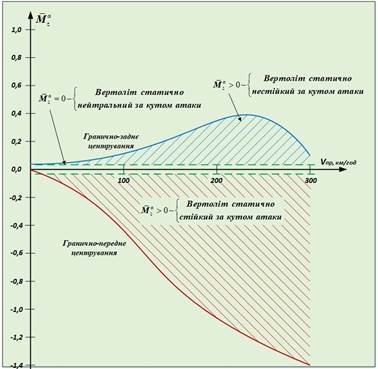
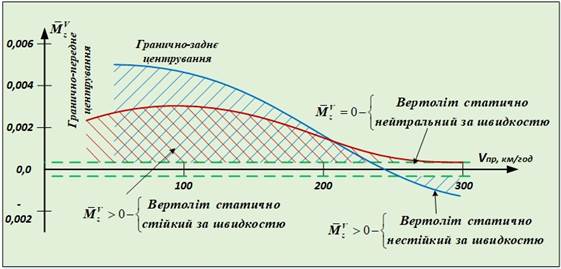
вертоліт стає статично стійким за кутом атаки. Аналіз зміни величини
Mzα за рис. 1.2.3 дає змогу зробити
такі висновки: - за передніх центруваннях вертоліт статично стійкий за кутом атаки в
діапазоні швидкостей від 40 км/год
до максимальних, оскільки - за середніх і нейтральних центруваннях вертоліт статично нейтральний
за кутом атаки в усьому діапазоні швидкостей, зокрема й на вертикальних
режимах, оскільки - за задніх і гранично-задніх центруваннях вертоліт статично нестійкий
за кутом атаки, оскільки Аналіз ступеня статичної стійкості вертольота за відомих
значень центрувань і швидкості польоту дає змогу визначити початкову
тенденцію (реакцію) вертольота за випадкової
зміни кута атаки. Як відомо, це сприяє зміні вихідного кута тангажу і кута
нахилу траєкторії. За необхідності пілот (автопілот) втручається в керування, не допускаючи подальшого
розвитку збуреного руху. Для цього він має відразу ж створити керуючий момент
Пілот керує вертольотом не за кутом атаки, а за зміною кута
тангажу, який він визначає і витримує, або візуально за горизонтом, або за
приладами (вказівником крену
і тангажу). Тенденцію вертольота до кабрування або пікірування пілот
може парирувати зміною поздовжнього моменту від сили Tнг відповідним відхиленням ручки керування.
При цьому потрібно мати на увазі, що імпульсне відхилення ручки керування теж
сприймається вертольотом як вплив і може викликати так само збурений рух,
подібно до збуреного руху за раптової зміни кута атаки.
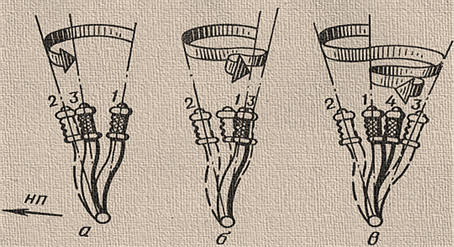
Якщо вертоліт має достатню стійкість за кутом атаки ( Характер переміщення ручки керування в процесі переходу з
режиму на режим і за маневрування, наприклад, для зменшення кута тангажу,
такий, як наведено на рис. 1.2.4, а.
Необхідно спочатку плавно віддати ручку керування від себе, а потім, як
тільки вертоліт змінить кут тангажу до необхідного значення, припинити її
подальше переміщення і встановити в нове балансувальне положення, яке
відповідає цьому режиму польоту. Якщо переміщати ручку керування дуже плавно,
можна практично однозначним переміщенням ручки керування в одному напрямку
повернути вертоліт на необхідну величину кута тангажу (атаки). Про такий вертоліт кажуть,
що він «ходить за ручкою» керування. Якщо вертоліт
статично нейтральний за кутом атаки, під час балансування і витримки усталеного польоту
необхідні подвійні рухи ручкою керування навіть за невеликих змін кута
атаки, щоб запобігти розвитку
збуреного руху. Пілот змушений у цьому випадку безперервно контролювати
заданий режим польоту, оскільки вертоліт самостійно не прагне витримувати
вихідний кут атаки і тангажу. Характер переміщення ручки керування під час маневрування,
наприклад, для зменшення кута тангажу, наведено на рис. 1.2.4, б. Необхідно спочатку віддати ручку керування від себе, а потім,
як тільки вертоліт відхилиться на необхідну величину за тангажем, перемістити
її на себе в початкове положення. При цьому рух має бути досить швидким (майже імпульсним) і невеликим за величиною
ходу ручки. На такому вертольоті пілот змушений робити кілька повторних рухів
ручкою керування, щоб забезпечити необхідне значення кута тангажу. Великі за
ходом руху ручки керування призводять, зазвичай, до «проскакування» необхідного кута і
поздовжнього розбалансування вертольота. Такий характер подвійних переміщень
ручки керування притаманний керуванню всіма одногвинтовими вертольотами на
висінні і на малих швидкостях польоту (за вимкненого автопілота). Якщо вертоліт
статично нестійкий за кутом атаки, для витримування встановленого польоту, а саме під
час балансування, пілот змушений постійно виконувати подвійні руху ручкою
керування, до того ж характер подвійних рухів на такому вертольоті відрізняється
від описаних вище. Ручка керування постійно відхиляється пілотом від свого
вихідного збалансованого положення для парирування тих чи інших збурень. Характер переміщення ручки керування в процесі маневрування
на такому вертольоті показаний на рис. 1.2.4, в. Наприклад, для зменшення кута тангажу необхідно спочатку
віддати ручку керування від себе, а потім, не чекаючи моменту, коли вертоліт
відхилиться на необхідну кількість градусів, перемістити її на себе за
вихідне збалансоване положення на велику величину. Як тільки вертоліт
припинить обертання (поворот), ручку керування слід
повернути в початкове положення, тепер уже в нове збалансоване положення, яке
відповідає меншому значенню кута тангажу, з огляду на те, що важко
розрахувати точну віддачу ручки керування з урахуванням запізнювання, і
вертоліт, крім того, може легко «проскочити» потрібне значення кута
тангажу через статичну нестійкість за кутом атаки.
Описана досить складна техніка пілотування на статично нестійкому
за кутом атаки вертольоті під час балансування й маневрування є специфічною
особливістю вертольотів першого покоління на більшості режимів польоту.
Однак, як показує практика експлуатації вертольотів, виконання польотів і за
таких характеристик стійкості можливе. Завдяки досить високому ступеню
ефективності та чутливості керування вертольота за тангажем пілоти оцінюють
поздовжню керованість цих вертольотів як прийнятну (без автопілотів або за
вимкненого автопілота).
Під статичною стійкістю за швидкістю польоту розуміється початкове прагнення
вертольота під дією аеродинамічних сил і їх моментів повернутися до вихідної
швидкості польоту за випадкової її зміни. Наявність сили опору сприяє забезпеченню стійкості за
швидкістю. Зі зростанням швидкості польоту сила лобового опору за інших
рівних умов збільшується, що викликає гальмування, а зі зменшенням швидкості
– зменшується, що викликає розгін під дією надлишкової рушійної (пропульсивної) сили. Напрямок зміни кута атаки визначається знаком поздовжнього
моменту, що з’являється за збільшення або зменшення швидкості польоту. Тому
критерієм, що визначає ступінь статичної стійкості вертольота за швидкістю,
вважається відношення Якщо за збільшення швидкості (ΔV > 0) результуючий момент
змінюється на пікірування (ΔМz < 0), а саме з’являється тенденція
до зменшення кута атаки, то як результат сумарна дія сил, спрямованих уздовж
осі Ох, призведе до
подальшого збільшення швидкості, що свідчить про нестійкість вертольота за
швидкістю, при цьому Для забезпечення статичної стійкості вертольота за
збільшення швидкості має з’являтися кабруючий момент, а саме має виконуватися
умова Зміна результуючого поздовжнього моменту за зміни швидкості
польоту залежить від зміни аеродинамічних моментів від: НГ, фюзеляжу,
стабілізатора і крила. Несучий гвинт сприяє стійкості вертольота
за швидкістю в усьому діапазоні швидкостей польоту. За збільшення швидкості
результуюча сила Tнг відхиляється
назад (кут природного
завалу збільшується), створюючи позитивний приріст моменту, а саме Фюзеляж не дає істотної зміни поздовжнього моменту за зміни
швидкості польоту, але сприяє статичній стійкості за швидкістю внаслідок
природної зміни сили лобового опору. Однак на великих швидкостях польоту,
коли досить великі негативні кути тангажу вертольота, дестабілізаційний
момент сили лобового опору фюзеляжу за збільшення швидкості помітно зростає і
сприяє нестійкості вертольота за швидкістю. Стабілізатор сприяє стійкості вертольота
за швидкістю з урахуванням того, що на моторних режимах польоту його
підіймальна сила спрямована донизу, а саме, протилежно Ту. Тому за збільшення швидкості польоту
зростає кабруючий момент від стабілізатора, а за зменшення – знижується,
тобто Крило, розташоване позаду центру
мас, знижує статичну стійкість вертольота за швидкістю, оскільки за
збільшення швидкості збільшується Yкр
та її пікіруючий момент, тобто Загалом завдяки впливу НГ
і стабілізатора вертольоти статично стійкі за швидкістю майже в усьому
діапазоні швидкостей польоту (рис. 1.2.6). Однак внаслідок впливу
крила і деякої статичної нестійкості фюзеляжу на максимальних швидкостях
польоту ступінь статичної стійкості вертольота за швидкістю знижується,
особливо за гранично-заднього центрування. За такого і близького до неї
центрування деякі вертольоти на максимальних швидкостях польоту можуть бути
статично нестійкі за швидкістю. Збільшення підіймальної сили сприяє збільшенню кута θ, а саме викривленню
траєкторії вгору, що в подальшому зумовлює відновлення вихідної швидкості.
Характеристики стійкості за швидкістю, як статичні характеристики стійкості
за кутом атаки, дуже впливають на керованість і пілотажні характеристики
вертольота. Особливості поздовжньої керованості за швидкістю польоту Зміна швидкості спричинює зміну кутів тангажу і нахилу траєкторії.
Відповідно до цього для парирування збурення за швидкістю пілота необхідно
насамперед компенсувати зміну поздовжнього моменту створенням спрямованого
назустріч йому керуючого моменту.
Якщо вертоліт стійкий
за швидкістю польоту, то для витримування заданого режиму за швидкістю
втручання з боку пілота або автопілота практично не потрібно. Для виконання горизонтального
розгону на такому вертольоті після збільшення загального кроку НГ і в подальшому за
постійного його значення слід відхилити ручку керування вперед. У міру
розгону пілот змушений відхиляти ручку керування все більше від себе для
подолання зростаючих кабруючих моментів із тим, щоб витримати
горизонтальність траєкторії. При цьому давильні зусилля на ручці керування,
якщо їх не утримувати, все більше зростають. Виконання горизонтального
гальмування на статично стійкому вертольоті вимагає переміщення ручки
керування на себе. У міру падіння швидкості пілот відчуватиме все більш
зростальні тягнучі зусилля на ручці керування. Якщо вертоліт
статично нестійкий за швидкістю польоту, на такому вертольоті (або на таких режимах) ускладнюється витримування режиму
польоту за швидкістю. За випадкової зміни швидкості вертоліт сам буде
прагнути змінити її ще більше. Наприклад, за випадкового збільшення швидкості
(через зустрічний порив вітру) у вертольота відразу ж
з’являється пікіруючий момент, кут тангажу зменшується і вертоліт перейде на
зниження з розгоном. Зі збільшенням швидкості зростає потрібне відхилення
ручки керування на себе, яке необхідно для виведення вертольота з пікірування
в горизонтальний політ. Спостерігається так зване «затягування» вертольота в пікірування. Тому за малих запасів
поздовжнього відхилення ручки керування на себе, якщо пілот допустить
надмірне збільшення швидкості, можливий невихід вертольота зі зниження.
Особливо небажана така поведінка вертольота за зниження на режимі самообертання
НГ. У цьому випадку
виключається збільшення загального кроку НГ
для виведення вертольота в горизонтальний політ, тому що можлива втрата
обертів НГ. Звідси
очевидний висновок про необхідність більшого запасу поздовжнього керування на
вертольотах, що не мають статичної стійкості за швидкістю польоту порівняно з
вертольотами статично стійкими. За виконання несталого руху, наприклад розгону, спочатку
ручку керування віддати від себе, але як тільки почнеться розгін, її
необхідно весь час переміщати на себе, щоб уникнути надмірного збільшення
кута пікірування. При цьому в процесі горизонтального розгону поступово
зменшується тиск і навіть з’являються тягнучі зусилля на ручці управління,
якщо не знімати навантаження тримерами. У процесі виконання горизонтального гальмування ручка
керування спочатку береться на себе, а потім весь час віддається від себе в
міру зменшення швидкості. Тягнучі зусилля в міру падіння швидкості
зменшуються і можуть з’явитися давлячі, якщо теж не утримувати ручку
керування. Такі дії ручкою керування незвичні для пілота і називаються
зворотними (а саме, в
процесі розгону ручка управління вимушено переміщається на себе, гальмування – від себе). Тому політ на таких швидкостях і режимах дуже ускладнений
для пілота. Він вимагає спеціального тренування і навичок, щоб правильно
відхиляти ручку керування.
1. Розгляд статичних характеристик стійкості за кутом
атаки, швидкістю польоту і демпфувальними властивостями дає змогу зробити
стислий аналіз характеристик стійкості поздовжнього руху вертольотів («динамічної» стійкості). Для цього треба розглянути
розвиток поздовжнього збуреного руху в часі. Цей рух вертольотів (без автопілота) зазвичай являє собою коливальний процес, у якому
можна виокремити два види коливань: - короткоперіодичні – з періодом коливань 0,5–3 с; - довгоперіодичні – з періодом коливань 10–50 с. Короткоперіодичні коливання пов’язані переважно з
обертанням вертольота навколо центру мас під дією періодично змінюваних
моментів аеродинамічних сил. Пілот виявляє цей рух за частою періодичною
зміною кута тангажу. Довгоперіодичні коливання пов’язані зі зміною
траєкторії руху центру мас внаслідок зміни величини і напрямку швидкості
польоту під дією періодично змінюваних за коливань аеродинамічних сил. На висінні найбільш просто розглянути
умови розвитку збуреного руху. Наприклад, у разі випадкового пориву попутного
вітру ΔU порушується
рівновага сил і моментів у поздовжній площині. Конус НГ і, отже, сила Тнг
відхиляються вперед, що спричинює збільшення поздовжнього моменту на
пікірування (ΔMz < 0), появу горизонтальної
складової Тх і
зменшення Ту. Досить велике відхилення сили Тнг забезпечує вертольоту достатню статичну
стійкість за швидкістю, призводить до значної величини ΔМz, що за слабкого демпфування спричинює зростання
кутової швидкості ωz.
Вертоліт починає опускати ніс ωx<0,
рухатися вперед під дією Тх
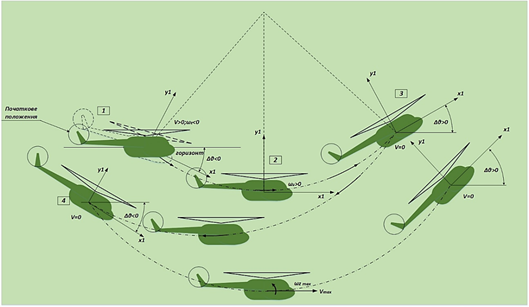
і знижуватися, тому що тяга НГ (Ту) стала менше сили тяжіння (положення 1 на рис. 1.2.7). За такого руху внаслідок появи швидкості польоту вперед
сила Тнг починає
відхилятися назад, дає приріст моменту на кабрування і з’являється ωx≥0.
Повернувшись до вихідного положення за тангажем (положення 2), вертоліт продовжує піднімати ніс. Після зменшення
швидкості до нуля у нього виникає значний кут кабрування (положення 3), який викликає тепер рух вертольота назад зі зниженням.
Збільшений кут тангажу призводить до того, що, проходячи нижню точку,
вертоліт набирає більшу швидкість, ніж та (порив вітру), яка вивела його з рівноваги. У разі виходу
вертольота знову у верхню точку (положення 4) кут пікірування виявляється
більшим за величиною, ніж кут кабрування в положенні 3, і далі картина
повторюється. Рух вертольота стає коливальним із відповідною амплітудою.
Вертоліт йде від початкового положення рівноваги, а саме є нестійким на
висінні літальним апаратом.
Однак період поздовжніх коливань вертольота на висінні
досить великий (12–16 с), а час подвоєння амплітуди – 3,5–4 с,
тому пілот встигає відхиленням важелів керування погасити виниклий рух, не
допускаючи його розвитку. Під час польоту вперед, крім розглянутих чинників, на
стійкість руху істотно впливають статичні характеристики стійкості за кутом
атаки. Раніше було розглянуто, що на великих швидкостях польоту, переважно
завдяки зростанню ефективності стабілізатора, вертоліт за кутом атаки стає
стійким (або
слабонестійким за задніх центрувань). Крім того, зі збільшенням
швидкості польоту дещо підвищуються демпфувальні властивості вертольота і
знижується статична стійкість за швидкістю. Як результат у міру збільшення
швидкості польоту нестійкість поздовжнього руху вертольота зменшується. Час
подвоєння амплітуди коливань зростає в кілька разів, як порівняти з режимом
висіння, і поздовжній рух вертольота на великих швидкостях польоту зазвичай
виявляється слабонестійким. Повне згасання збуреного руху і самостійне повернення до
вихідного режиму польоту за всіма характеристиками – явище поки практично
недосліджене для вертольотів (без автопілота). Однак ступінь стійкості за збурень за різними параметрами,
які характеризують режим польоту, може бути різним. Найбільш важливими
показниками режиму польоту є швидкість і перевантаження. Тому для пілота дуже
важливі характеристики стійкості руху за швидкістю і перевантаженням. 2. Вертоліт
вважають стійким за швидкістю, якщо без втручання пілота зберігає швидкість
вихідного режиму польоту. В тих умовах польоту, в яких вертоліт статично
нестійкий за швидкістю, він не володіє і динамічною стійкістю. Однак
наявність статичної стійкості за швидкістю дає підстави очікувати, що
вертоліт здебільшого може відновлювати вихідну швидкість польоту після
припинення збурень, а саме має стійкість руху за швидкістю. 3. Вертоліт вважають стійким за перевантаженням, якщо без
втручання пілота зберігає вихідне його значення (повертається до нього). Величина нормального перевантаження змінюється як за зміни
швидкості польоту, так і зміни кута атаки. Якщо вертоліт повертається до
початкового значення швидкості, але за іншого значення кута атаки,
перевантаження, отже, режим польоту буде іншим. Тому поняття «стійкість за перевантаженням» є більш повною
характеристикою поздовжнього руху вертольота, ніж поняття «стійкість за швидкістю». Воно дає змогу аналізувати
реакцію вертольота за зовнішнього впливу, що виражається в одночасній зміні і
кута атаки, і швидкості польоту. Стійкість вертольота з перевантаженням має
особливе значення для маневрених вертольотів, здатних виконувати складний і
навіть вищий пілотаж. Ця характеристика проявляється не тільки на сталих
режимах польоту, але і в процесі маневрування. Для пілота це дуже важливо. 4. Нестійкий за перевантаженням вертоліт у разі введення в
маневр зі збільшенням перевантаження рухається в напрямку ще більшого її
збільшення, що створює явище «підхоплення» і небезпеку перевищення
встановлених обмежень. Внаслідок статичної нестійкості за кутом атаки більшість
вертольотів (Мі-2, Мі-8,
Мі-12 та інші) є більшою чи меншою мірою нестійкими за
перевантаженням. Отже, щоб уникнути різкої появи «підхоплення», у таких вертольотів установлюються жорсткі
обмеження за креном і темпом узяття ручки на великих швидкостях польоту. 5. Якщо
вертоліт стійкий за перевантаженням, пілот пілотує його на маневрі майже
однозначним (одного напрямку) переміщенням ручки
керування. Це добре сприймається пілотом: треба збільшити перевантаження –
взявши ручку керування на себе, «дійшло» перевантаження до заданого
значення за вказівником перевантажень – зупинивши ручку в цьому положенні і
перевантаження зберігається заданим. Аналогічна картина спостерігається і за
зменшення перевантаження. Крім того, контроль заданого перевантаження в цьому
випадку здійснюється за зусиллями на ручці керування. Це значно розвантажує
увагу пілота в процесі маневрування. 6. За
нейтральної стійкості за перевантаженням теж досить просто пілотувати
вертоліт, але потрібно більше уваги приділяти контролю величини заданого перевантаження.
На такому вертольоті за збільшення, наприклад, перевантаження ручка керування
переміщається на себе, але у разі «підходу» перевантаження до заданого
значення ручку керування необхідно відразу ж повертати в початкове положення.
Тут важче дозувати перевантаження за величиною ходу ручки і за зусиллями на
ній, тому що одному і тому самому балансувальному положенню ручки може
відповідати різне перевантаження. Тому під час маневрування пілот змушений
виконувати серію подвійних рухів і постійно контролювати величину
перевантаження за вказівником, щоб не допустити її перевищення більше
допустимого значення. Якщо на вертольоті не встановлено покажчик нормальних
перевантажень, дотримуватися допустимих експлуатаційних обмежень на такому
вертольоті досить складно. Зазвичай, вводяться різні інші обмеження (за креном, за темпом взяття
ручки управління на себе, за величиною ходу ручки тощо). Техніка пілотування під час маневрування на вертольоті,
нестійкому за нормальним перевантаженням, ще більш ускладнюється. У такому
випадку пілот має для збільшення перевантаження взяти ручку керування на
себе, а потім у разі «підходу» перевантаження до заданого
значення віддати ручку від себе за вихідне положення, та ще й на більшу
величину, ніж вона бралася на себе. Якщо цього не зробити, вертоліт
збільшуватиме перевантаження понад необхідну величину. Пілотувати нестійкий
за перевантаженням вертоліт на граничних режимах дуже складно. Практично,
незважаючи на прагнення пілота зберегти задане значення перевантаження і запобігти
її випадковому перевищенню, завжди можливий вихід за експлуатаційні
обмеження.
Зміна кута ковзання вертольота призводить до одночасної
зміни як моментів «рискання» Мy, так і моментів крену МХ. Останнє зумовлює зміну крену. І навпаки,
рух вертольота за креном викликає рух «рискання». Взаємозв’язок цих рухів у міру збільшення
швидкості польоту безперервно зростає. Тому ці два види руху не можна
розглядати окремо, про них говорять як про одне – бічний рух вертольота («бічний» тому, що необхідною
умовою такого руху є поява або зміна кута ковзання). Характеристики стійкості цього руху називають
характеристиками бічної стійкості вертольота. Їх можна отримати, розглянувши
збурений рух вертольота за креном і рисканням. Вертоліт має
бічну стійкість, якщо без втручання пілота здатний зберігати (відновлювати) вихідні кути крену і
ковзання, а саме рівновагу бічних сил, моментів крену і рискання. Зазвичай зміна рівноваги (бічний порив вітру, рух ручки тощо) спочатку викликає відхилення
будь-якої однієї з характеристик бічного руху – кута ковзання або кута крену.
Це відхилення потім призводить до розвитку бічного збуреного руху за всіма
його параметрами. При цьому, як і в поздовжньому русі, на стійкість бічного
руху великий вплив робить первісна реакція вертольота на збурення, а саме на
статичні характеристики його бічної стійкості. Отже, важливо визначити, як змінюється результуючий (сумарний) момент рискання за
відхилення за кутом ковзання і моментом крену за відхилення за креном.
Під статичною шляховою (флюгерною) стійкістю розуміють початкову тенденцію вертольота відновити
вихідний кут ковзання в момент випадкової його зміни. Фізично для статично стійкого в шляховому відношенні
вертольота це означає, що за випадкової появи ковзання виникає додатковий
момент рискання, розвертає вертоліт на усунення цього ковзання, інакше
кажучи, зміна результуючого моменту рискання Мy має сприяти усуненню випадково виниклого
ковзання. Отже, відносно збільшення моменту рискання ΔMy до зміни
кута, ковзання Δβ
(в межі – похідна Ліве ковзання вважається негативним, а результуючий
шляховий момент (момент рискання), розвертає вертоліт ліворуч,
– позитивним. Тому для статично стійкого в шляховому відношенні вертольота
критерій статичної стійкості має бути негативним - Зміна результуючого моменту рискання залежить від того, як
змінюються аеродинамічні шляхові моменти від фюзеляжу, кіля (кільової балки) і рульового гвинта. На висінні, в штиль, вертоліт за кутом рискання є статично
нейтральним, оскільки після випадкової зміни кута рискання (курсу) шляхові моменти від згаданих
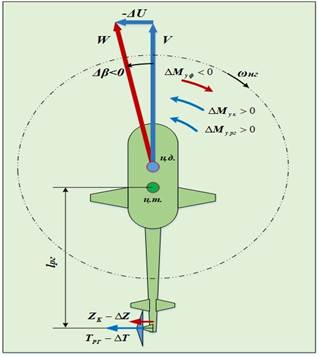
частин вертольота не змінюються і вертоліт залишається у вихідному положенні. За поривів вітру ліворуч тяга РГ зменшується і
зменшується її шляховий момент. Під дією реактивного моменту НГ
вертоліт прагне розвернутися на вітер, зменшуючи кут ковзання, а саме є
статично стійким за кутом ковзання (в шляховому
відношенні). Наявність кіля, на якому створюється бічна сила ZK, підвищує
ступінь статичної шляхової стійкості. За пориву вітру малої швидкості праворуч тяга РГ
може дещо зрости. Разом із дією бічної сили кіля це забезпечує певний рівень
статичної шляхової стійкості. Однак за великих швидкостей вітру праворуч (зазвичай, перевищують
допустимі обмеження) відбувається падіння тяги РГ внаслідок
розвитку зривної зони на його лопатях. Вертоліт стає нестійким і
розвертається хвостом на вітер (рис. 1.2.8). Під час польоту вперед всі вертольоти мають статичну
шляхову стійкість, оскільки цьому сприяють рульовий гвинт і кіль, у яких Ступінь шляхової статичної стійкості вертольота значно
змінюється залежно від швидкості польоту і кута атаки фюзеляжу. Для всіх вертольотів, особливо за наявності кіля,
характерно, що шляхова статична стійкість збільшується зі зростанням
швидкості польоту і від’ємного кута атаки фюзеляжу (рис. 1.2.8). За позитивного кута атаки
фюзеляжу відбувається затінення кіля і зменшення його ефективності. Як
результат можливе різке зменшення шляхової статичної стійкості, що є однією з
причин появи бічних коливань вертольота. Статична
шляхова нестійкість вертольота вкрай небажана, тому що за випадкової
появи ковзання вертоліт прагнутиме ще більше збільшити її. При цьому
погіршується шляхова керованість, ускладнюється техніка пілотування. Тому для
сучасних вертольотів характерно збільшення площі кіля, щоб якомога більше
збільшити ступінь статичної шляхової стійкості на всіх режимах польоту.
Під статичною поперечною стійкістю розуміють
прагнення вертольота відновити вихідний кут крену після випадкової його зміни.
Однак вертоліт безпосередньо на крен не реагує. Зміна нахилу призводить до
зміни рівноваги бічних сил і появи ковзання. Ковзання ж призводить до зміни
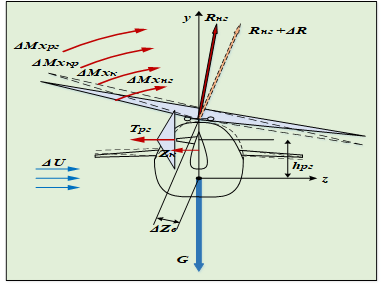
не тільки шляхових, а й поперечних моментів. Майже всі елементи конструкції вертольота, особливо несучий
гвинт і крило, сприяють статичній поперечній стійкості вертольота (рис. 1.2.9). Тому для всіх одногвинтових
вертольотів характерний досить високий ступінь поперечної стійкості. Він
збільшується за збільшення швидкості польоту і кута атаки вертольота. Надмірно висока статична поперечна стійкість вертольота
може виявитися зайвою за недостатньої шляхової стійкості. У такому випадку
відхилення за креном усувається швидше, ніж розвинене ковзання, і вертоліт за
такого самого ковзання переходить у крен протилежного напрямку. За великого значення відношення
Поведінка вертольота в процесі бічного збуреного руху
визначається насамкінець величиною і співвідношенням ступенів його статичних
поперечної і шляхової стійкості, інерційними характеристиками і властивостями
демпфування. 1. На висінні і малих
швидкостях польоту (до V = 30–40 км/год) бічний рух усіх одногвинтових вертольотів
коливально нестійкий внаслідок того, що на цих режимах взаємозв’язок рухів
крену і рискання ще невеликий, а рух за креном (аналогічно руху за тангажем на висінні) нестійкий. Але період коливань за креном становить 8–10 с, а час подвоєння амплітуди також досить великий – 4–8 с. Це дає змогу пілоту своєчасно втрутитися в керування
і погасити випадково виниклі коливання і такі, що розвиваються. 2. На великих швидкостях
польоту, аж до максимальних, усі вертольоти, зазвичай, мають
стійкість бічного збуреного коливального руху. Це пояснюється наявністю
статичної стійкості в шляховому і поперечному відношеннях, а також
збільшенням демпфування з боку рульового гвинта, кіля та інших елементів
конструкції. Коливання, які виникають за креном і кутом рискання з періодом 3–7 с, мають
загасальний характер. Однак на тих режимах, на яких значення поперечних коливань
стає надмірно високим, вертоліт енергійніше реагує за креном на виникнення
ковзання і можлива поява коливальної нестійкості в бічному русі. Це ускладнює
техніку пілотування пілота і роботу автопілота, а також ускладнює виконання
завдань, як-от прицілювання і ведення стрільби та в інших випадках.
1. У
шляховому і поперечному коливаннях пілот пілотує вертоліт, орієнтуючись на
положення скління кабіни відносно земних орієнтирів і лінії горизонту, а також
за вказівником курсового кута і авіагоризонту. Ці прилади дають змогу
пілотові визначати кути рискання і крену. При цьому він контролює наявність
ковзання за покажчиком повороту і ковзання, або за авіагоризонтом, або за
вказівником крену і тангажу. Ці прилади показують наявність або відсутність
ковзання. Зсув кульки приладу від центра ліворуч відповідає лівому ковзанню,
зміщення праворуч – правому. Але величину кута ковзання пілот може оцінити
дуже наближено, і то тільки у візуальному польоті. У разі якщо ковзання значне і сам вертоліт гасить його
повільно, пілот може усунути ковзання відхиленням ножної педалі. Педаль
відхиляється в бік виникнення ковзання (в бік відхилення кульки). За правого ковзання відхиляється
вперед права педаль – ковзання усувається, кулька повертається в центр, як
кажуть, «біжить» від педалі. У разі появи крену вертоліт також сам
усуває його. Пілот може допомогти швидшому відновленню крену. У процесі маневрування, якщо пілот працює важелями
керування некоординовано, у разі переміщення ручки в поперечному напрямку
з’являється крен і розвивається ковзання в бік крену. На статично стійкому в
поперечному відношенні вертольоті ковзання викликає появу моменту крену,
спрямованого у бік, протилежний керуючому, і вертоліт, реагуючи на ковзання,
прагне вийти з крену. 2. Якщо
вертоліт нейтральний у шляховому відношенні на цьому режимі, за випадкового
виникнення ковзання момент рискання, що діє на вертоліт, не змінюватиметься.
Отже, вертоліт не змінить кут рискання (курс польоту), а ковзання не усуватиметься шляховим моментом. 3. Якщо вертоліт статично нейтральний у поперечному
відношенні, за появи крену і пов’язаного з ним ковзання він не виправлятиме
крен і за дотримання заданого режиму пілоту необхідно втручатися в керування,
щоб усунути ковзання, яке виникає. Переміщення ручки керування в поперечному
напрямку подвійні подібно вищеописаним для статично нейтрального вертольота
за кутом атаки. Тому, зокрема, на висінні і на вертикальних режимах, коли
вертоліт майже нейтральний за кутом атаки в разі ковзання, дії ручкою
керування в поздовжньому і поперечному напрямках аналогічні. Якщо вертоліт статично нестійкий у поперечному відношенні,
то за появи крену він сам прагне кренитися в бік крену, а розвиваюче ковзання
буде тільки сприяти цьому. Техніка пілотування ручкою керування в поперечному
каналі аналогічна вищевикладеній для статично нестійкого вертольота за кутом
атаки. Характерним прикладом ускладнення техніки пілотування в
поперечному напрямку може служити політ в умовах значного зриву потоку з
лопатей в азимутах 260–3000 за перевищення
максимально допустимих швидкостей. За випадкового крену праворуч збільшується
зона зриву потоку з лопатей, отже, момент крену праворуч. Замість звичайного
вирівнювання за креном у процесі розвитку ковзання вертоліт продовжує
кренитися праворуч. Якщо пілот, прагнучи звичною дією парирувати розвиток
крену, відхилить ручку ліворуч, то збільшаться кути встановлення в районі
зривної зони, що призведе до її додаткового збільшення, і замість необхідного
збільшення підіймальної сили в цьому секторі вона падає, водночас
збільшується момент, вертоліт крениться праворуч. Подальше переміщення ручки
керування ліворуч до упору лише погіршує становище, і вертоліт може так і не вийти
з правого крену, а увійде в спіралеподібний рух.
Під час польоту з ковзанням збільшується (порівняно з
польотом без ковзання) шкідливий опір вертольота Хф, з’являється бічна сила фюзеляжу Zф і змінюється
бічна сила кіля ZK.
Для НГ суттєвої різниці в режимі обтікання немає, але умови роботи РГ
значно змінюються, тому що змінюється його кут атаки, тому виконання польоту
з ковзанням за інших рівних умов завжди вимагає додаткових витрат потужності СУ. У льотній практиці найчастіше застосовується короткочасне
нестале ковзання під час маневрування. У разі створення сталого ковзання в той чи інший бік зі
збереженням швидкості польоту за приладом, що дорівнює вихідній, необхідно
додатково збільшити загальний крок НГ. При цьому порушується не тільки
шляхова і поперечна, а й поздовжня рівновага. Це особливо помітно на
швидкостях, близьких до максимальної, і за кутів ковзання більше 100. Якщо на малих і середніх швидкостях польоту аеродинамічним
впливом бічного руху на поздовжнє для всіх вертольотів можна знехтувати, то
на максимальних швидкостях для деяких вертольотів це може призвести до
помилкових висновків. На максимальних швидкостях за створення ковзання з
кутами понад 100 відбувається
зміщення зон зриву і зворотного обтікання на НГ, що призводить до
зміни поздовжнього моменту від НГ. Істотною є в цьому випадку роль стабілізатора.
Якщо стабілізатор перебуває в зоні впливу індуктивного потоку НГ, то
за таких кутів ковзання цей вплив змінюється. Як результат у процесі
створення ковзання порушується поздовжня рівновага. Під час виконання усталеного польоту з ковзанням необхідне
одночасне відхилення ручки керування і ножних педалей. Для статично стійкого вертольота в поперечному і шляховому
відношеннях характерно таке: що більше кут ковзання, то більше потрібно
відхиляти ручку керування в бік ковзання (наприклад, за ковзання ліворуч і ручку – ліворуч). За спроби створити ковзання
одними педалями з’являється низхідна спіраль, оскільки в цьому випадку на
розвивальне ковзання вертоліт реагує зворотним креном. Перевантаження
залишається майже незмінним, вертоліт розвертається в бік крену із втратою
висоти. За спроби створити ковзання однією ручкою керування, а саме креном
вертольота, вертоліт також входить у низхідну спіраль, якщо не збільшувати
нормальне перевантаження, тому що на появу ковзання вертоліт реагуватиме
рисканням (зміною курсу) в бік крену. |
||||||||||||||||||||||||||||||||||||||||||||||||||||
 .
. .
.