|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1. РІВНОВАГА, СТІЙКІСТЬ І
КЕРОВАНІСТЬ ЛІТАЛЬНИХ АПАРАТІВ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Залежно від режиму польоту на вертоліт діють масові,
аеродинамічні та інерційні сили і моменти. Останні виникають на несталих
режимах польоту, коли вертоліт рухається з прискореннями, які є причиною
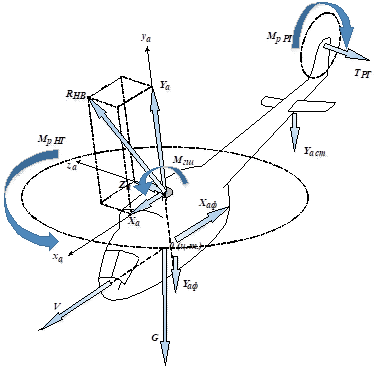
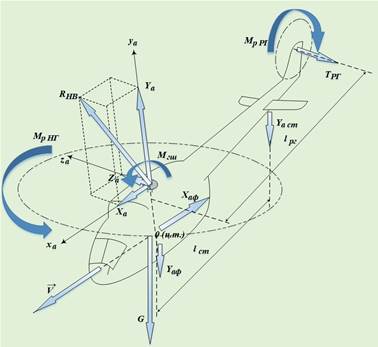
виникнення інерційних сил та моментів. На вертоліт одногвинтової схеми в сталому польоті діють
такі сили і моменти (рис. 1.1.1):
Просторові напрямки сил та моментів, що діють на вертоліт у
польоті, значною мірою залежать від режиму польоту. Тому для зручності
аналізу динаміки польоту використовують прямокутні системи координат і в
рівняннях, які описують рух вертольота, використовують проєкції сил та
моментів. Переважно для аналізу використовують такі системи
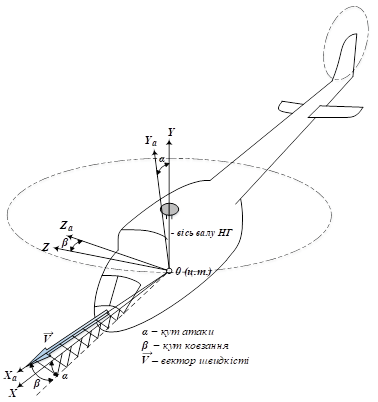
координат: – зв’язана; – швидкісна; – нормальна. Взаємозв’язок цих систем координат показано на рис.
1.1.2 та 1.1.3.
– вісь 0X розташована у горизонтальній площині
симетрії і спрямована вздовж будівельної горизонталі вертольота; – вісь 0Y розташована у вертикальної площині симетрії
і спрямована вздовж вала НГ; – вісь 0Z розташована в горизонтальної площині
перпендикулярно осям 0X і 0Y. – 0XaYaZa –
швидкісна система координат, осі якої пов’язані з вектором швидкості: – вісь 0Xa спрямована в напрямку вектора швидкості
незбуреного потоку – вісь 0Ya розташована у вертикальній площині
симетрії вертольота перпендикулярно осі 0Ya і відхилена відносно осі 0Y
на кут атаки (α); – вісь 0Zа спрямована перпендикулярно осям 0Xa
і 0Ya і відхилена відносно осі 0Z на кут ковзання (β).
Швидкісну систему координат зручно використовувати для
аналізу рівноваги і балансування на режимах польоту з поступальною швидкістю.
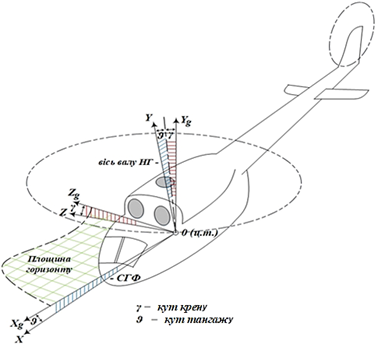
Рівновагу на вертикальних режимах і на віражах зручно аналізувати за
допомогою нормальної земної системи координат (0XgYgZg), осі 0Xg і
0Zg розташовані в площині горизонту (0XgZg): - вісь 0Xg розташована в площині горизонту; вісь 0Xg
спрямована вздовж лінії заданого курсу, кут між осями 0X і 0Xg
називається кутом тангажу (θ); - вісь 0Yg спрямована перпендикулярно площині
горизонту, її напрям із напрямом, протилежно вектору сили ваги ( - вісь 0Zg спрямована перпендикулярно площині 0XgYg
і відхилена від осі 0Z на кут крену
Аеродинамічні сили залежать від орієнтації вертольота щодо
вектора швидкості.
Рівняння описує рух вертольота навколо центру мас під
впливом моментів цих сил, записується в проєкціях на осі зв’язаної системи
координат.
Рівняння описує рух вертольота навколо центру мас під
впливом моментів цих сил, записується в проєкціях на осі зв’язаної системи
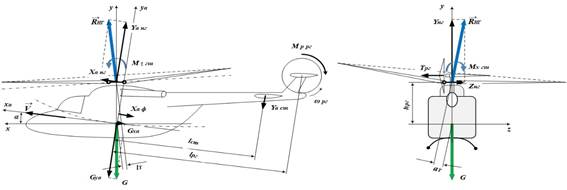
координат. На рис. 1.1.5 наведено сили, що діють на вертоліт
одногвинтової схеми з крилом і кілем, а також їх проєкції на швидкісні осі
системи координат за відсутності крену і ковзання вертольота.
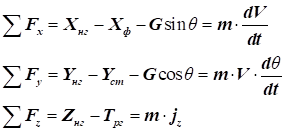
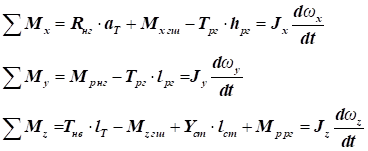
Перші три рівняння описують рух центру мас
вертольота, інші три – рух
вертольота навколо центру мас. Інерційні та масові сили прикладені в центрі мас вертольота,
аеродинамічні сили прикладені в центрі тиску або аеродинамічному фокусі. Напрямок складових сили тяжіння визначається з урахуванням
знака кута нахилу траєкторії. Підіймальні сили НГ
– Yнг (і
крила – Yкр)
у вертольотів завжди спрямовані за позитивним напрямком осі 0у. Під дією сил, наведених на рис. 1.1.5, вертоліт
виконуватиме розгін із набором висоти за криволінійною траєкторією,
позначеною штриховою лінією. При цьому, якщо пілот утримує вертоліт від крену
і ковзання, не втручається в поздовжнє управління, темп зміни швидкості
польоту і кута нахилу траєкторії буде безупинно змінюватися у зв’язку зі
зміною величин і співвідношень сил, що діють уздовж координатних осей, як у
зв’язку зі зміною кута якості (θ), так і внаслідок зміни кута
тангажу. Траєкторію і залежність характеристик руху вертольота від
часу можна отримати розв’язанням системи з шести рівнянь. Сукупність характеристик (параметрів) польоту, як-от швидкість, висота
польоту, крен і тангаж вертольота, темп їх зміни визначає режим польоту
вертольота. Розрізняють несталі й сталі режими польоту. Несталим називають політ зі змінною за величиною або
напрямком швидкістю (розгін або
гальмування в горизонтальному польоті, криволінійні маневри, зліт, посадка
вертольота тощо). Несталі режими польоту зазвичай є перехідними від
одного сталого режиму до іншого. Сталим називають політ вертольота з постійною
за величиною і напрямком швидкістю за відсутності прискорення. Це означає, що
всі діючі на вертоліт сили і їх моменти взаємно урівноважені.
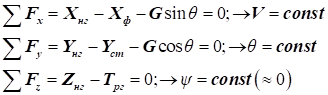
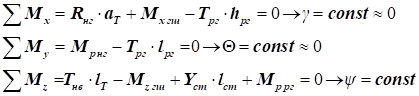
За рівноваги вертольота праві частини всіх рівнянь руху
стають рівними нулю і кожне з цих рівнянь виражає умову сталості відповідного
параметра польоту:
Виконання умов першого рівняння забезпечує сталість
швидкості за величиною, виконання другого рівняння – сталість кута нахилу
траєкторії, виконання третього рівняння – сталість курсового кута. Для
виконання цих умов необхідні сталість кутів крену, рискання і тангажу
вертольота, що забезпечується відсутністю неврівноважених моментів щодо
будь-якої з координатних осей. При цьому через природний завал вісь конуса НГ
зазвичай відхилена назад і момент Мz,гш
> 0. Для переходу до сталого режиму польоту вертоліт має бути
попередньо збалансованим. Балансуванням вертольота називається процес керування, в процесі якого
пілот урівноважує вертоліт за силами і моментами. Рівновага поздовжніх (уздовж осі 0х) і поперечних (уздовж осі 0у) сил, а також поздовжніх (щодо поперечної осі 0z) моментів забезпечується
встановленням кута загального кроку НГ (φош) і поздовжнім відхиленням ручки
керування відповідно до режиму польоту. Рівновага бічних сил (ΣFz = 0), а також поперечних (Мx)
і рискання (Мy) моментів досягається встановленням відповідної величини
сили тяги рульового гвинта РГ
за допомогою педалей і поперечного відхилення сили тяги НГ Rнг за допомогою
ручки керування вертольотом. Відповідні рівноваги вертольота, положення важелів
керування, а також значення кутів, що характеризують просторове положення
вертольота і його орієнтування щодо вектора швидкості, називають балансувальними. Режим польоту вертольота, який пілот задає встановленням
важелів керування в певне балансувальне положення, може порушуватися
зовнішніми впливами (збуреннями). Сталий політ вертольота без
впливу збурень називається незбуреним рухом. Рух вертольота після впливу збурення (без втручання пілота в
керування) називається збуреним. Характеристики збуреного руху є
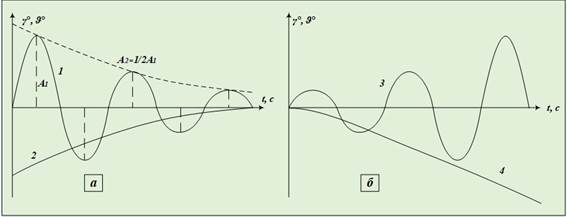
характеристиками власного руху вертольота. Збурений рух може бути коливальним і неколивальним (аперіодичним). Відхилення характеристик
руху від заданих із плином часу можуть зменшуватися, при цьому вихідний режим
польоту відновлюватиметься. Під стійкістю
руху вертольота розуміють здатність його повертатися без
втручання пілота до вихідного режиму усталеного польоту після припинення дії
збурювальних причин. Характер збуреного руху вертольота залежить насамперед від
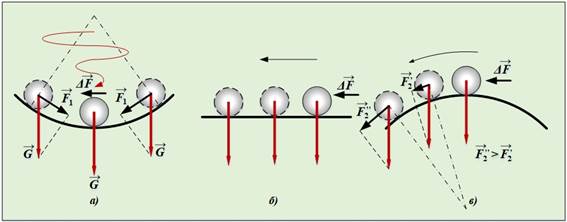
напрямку сил і моментів, що з’являються у разі порушення рівноваги (рис. 1.1.6). Для забезпечення стійкості
руху необхідно, щоб за відхилення від вихідного режиму вертоліт мав
властивості створювати відновлювальні сили і моменти сил, що перешкоджають
розвитку збурень і відходу від стану рівноваги, які прагнуть відновити
вихідне положення (рис. 1.1.7).
Статичні характеристики стійкості відповідають на питання
про те, в яких умовах рівноваги сил і моментів – стійкої, нейтральної або
нестійкої – виконується політ (рис. 1.1.8).
Наявність статичної стійкості є необхідною, але
недостатньою умовою для повернення вертольота до вихідного режиму, зокрема
для забезпечення стійкості руху (динамічної стійкості). Подальший розвиток збуреного руху після початкового
відхилення залежить не тільки від статичних характеристик стійкості, а й від
наявності демпфування. Демпфування полягає в появі
аеродинамічних, демпфувальних сил і їх моментів МД, що сприймають енергію збуреного руху і
розсіюють її в навколишнє середовище, гасячи тим самим цей рух.
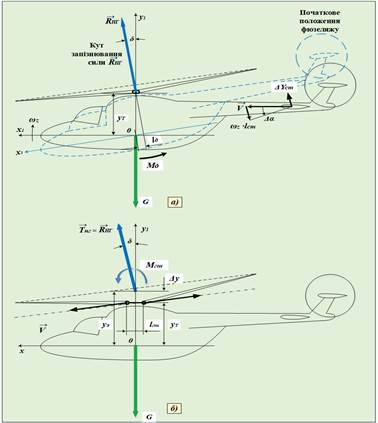
Демпфувальні властивості має і несучий гвинт. За зміни кута
тангажу (або крену) вертольота вісь конуса і
сила Тнг внаслідок
інерції лопатей і шарнірної їх підвіски дещо відстають від осі вала НГ (на кут δ=kωx),
як наведено на рис. 1.1.8. Відставання то більше, що більше кутова
швидкість тангажу або крену, що важче лопаті і то менше частота обертання НГ. При цьому створюється
спрямований проти обертання демпфувальний момент сили Тнг
Величина демпфувального моменту
Тільки за наявності статичної стійкості і достатнього
демпфування вертоліт має стійкість руху (має динамічну стійкість). Розгляд поздовжнього збуреного руху дає змогу отримати
характеристики поздовжньої стійкості вертольота. В інших випадках можна виокремити бічний рух, а саме
переміщення уздовж осі Oz і
обертання за креном і рискання (відносно осей 0х і Оу). Розглядаючи розвиток бічного збуреного руху, можна
визначити характеристики бічної стійкості. Поділ руху вертольота на поздовжній і бічний найбільш
правомірний для симетричних в аеродинамічному відношенні схем вертольотів –
співвісної і меншою мірою – поздовжньої і поперечної. У вертольотів
одногвинтової схеми такий поділ руху здебільшого є досить умовним, тому що
насправді ці види руху тісно пов’язані. Зокрема, поздовжні коливання
спричинюють зміну величини і напрямків результуючих аеродинамічних сил несучих
і кермового гвинтів, що призводить до зміни моментів крену і рискання і
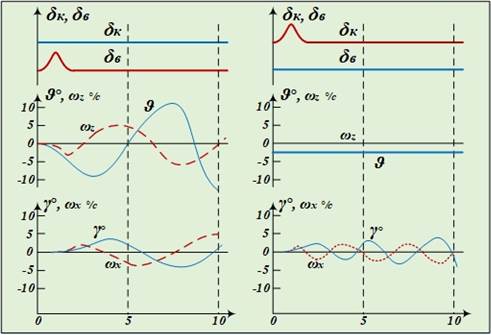
виникнення сумнівів щодо поздовжньої і нормальної осей (рис. 1.1.9, а). Якщо вертоліт має стійкість руху, але повернення до
вихідного режиму польоту займає тривалий час, пілот може, не чекаючи
закінчення цього процесу, відхиленням важелів керування швидше відновити
вихідний режим польоту. Втручання пілота в керування вертольотом потрібно ба
більше, якщо вертоліт нестійкий, тому що в процесі збуреного руху він не
здатний повернутися самостійно до вихідного режиму. Нестійкий вертоліт,
реагуючи на зовнішні впливи, легко виходить зі стану рівноваги. На такому
вертольоті сам пілот може ненавмисно порушити рівновагу найменшими неточними
рухами важелів керування. Виконання польоту на нестійкому вертольоті вимагає
особливої техніки пілотування та постійної уваги пілота. Отже, за будь-яких характеристик
стійкості вертольота виконання польоту можливо тільки за наявності
відповідної керованості. Напрямок і темп віддачі, величина ходу і зусилля на
важелях керування залежать не тільки від характеристик стійкості, але і від
того, як вертоліт реагує на переміщення важелів керування, зокрема від
характеристик його керованості. Керованістю вертольота називається його здатність
реагувати на керуючі дії пілота (переміщення
важелів керування). Керованість вертольота визначається, з одного боку, його
динамічними властивостями у вільному русі, з іншого – можливостями створення
керуючих сил і моментів. Кількісними характеристиками керованості вертольотів
є: потужність, ефективність, чутливість управління і запізнювання в
керуванні.
Потужність керування визначається величиною
максимального керуючого моменту Мкер..макс
, що виникає за
відхилення важеля керування від нейтрального положення до упору. Цей момент
має забезпечити на всіх режимах польоту можливість парирування збурень, що
діють на вертоліт. Але в польоті максимальний наявний керуючий момент буде
різним на різних режимах залежно від балансування положення відповідного
важеля керування. Тому потужність керування виконується так, щоб на граничних
режимах польоту за гранично допустимих центруваннях її залишок (за мінімальних запасів ходу
важелів керування – 20%) все ж забезпечував необхідну
керованість за парирування збурень.
Розрізняють ефективність поздовжнього, поперечного і
шляхового керування. Що більше величина керуючого моменту за одиничного
відхилення важеля керування, то вище ефективність такого виду керування. Тому
ефективність поздовжнього і поперечного керування то вище, що більше сила
тяги НГ, вертикальне центрування вертольота, а також розніс ГШ. Ефективність шляхового керування то вище, що більше тяга
рульового гвинта РГ і відстань від його осі до центру мас вертольота. Знаючи ефективність керування, можна на різних режимах
польоту визначити величину зміни керуючого моменту за відхилення важеля
керування на величину Δδ:
Однак величина ефективності керування ще не характеризує
поведінку вертольота за того чи іншого відхилення ручки керування або
педалей. Адже керуючому моменту протидіють демпфувальні, інерційні і
стабілізаційні моменти. Реакція вертольота на керуючий вплив характеризується
чутливістю керування, яка є основним показником керованості вертольота. Чутливість керування визначається величиною
сталої кутової швидкості обертання вертольота за відхилення важеля керування
на одиницю ходу. Чутливість
керування то вище, що більше ефективність керування і менше
демпфувальні властивості вертольота. Чутливість – важлива
характеристика керування, тому що, з огляду на фізіологічні особливості
пілота, погано, коли вертоліт має надмірно високу чутливість керування і коли
вона у нього дуже низька. Низька чутливість керування робить вертоліт
малоповоротним, пілотові доводиться відхиляти на більшу величину один із
важелів керування, щоб досягти бажаної кутової швидкості повороту. За високої
чутливості керування вертоліт стає «суворим у
пілотуванні» – на невеликі, практично непомітні, рухи ручки
керування він реагуватиме з великою кутовою швидкістю, що може призвести до
розгойдування вертольота. Отже, чутливість керування залежить від співвідношення між
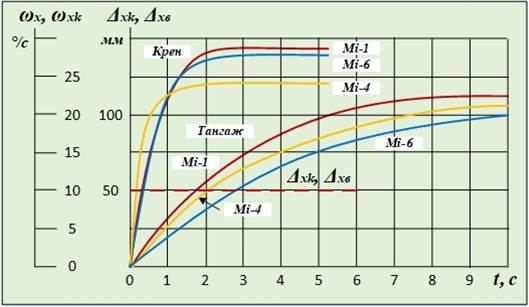
ефективністю керування та показником демпфування
За
ступінчастого відхилення ручки керування: Δхк = Δх = 50 мм. Співвідношення між ефективністю керування і демпфуванням,
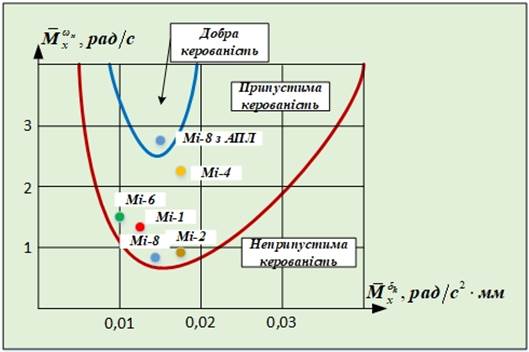
що характеризує чутливість керування, відіграє велику роль в оцінюванні
комплексу пілотажних характеристик вертольота. Для прикладу на рис. 1.1.11 наведено граничні
співвідношення між відносними ефективністю керування і демпфуванням, що
вважаються добрими і прийнятними. Запізнення в керуванні вимірюється часом τзап від
початку відхилення ручки керування не почне обертатися вертоліт. Запізнення
спостерігається в поздовжньому і поперечному керуванні вертольотів і
визначається переважно тривалістю створення керуючих моментів від НГ.
У процесі пілотування пілот відчуває запізнення керування в
тому, що вертоліт із запізненням ходить за ручкою керування. Для
поліпшення керованості (зменшення часу
перехідного процесу) пілот використовує запобіжні, але досить малі за
величиною переміщення ручки керування, відхиляє її в потрібний бік на більшу
величину, ніж потрібно для балансування на новому режимі, щоб отримати
необхідну кутову швидкість обертання. Потім, ще до моменту нахилу вертольота
на необхідний кут, ручка управління переміщається в нове балансувальне
положення. Таке переміщення ручки управління називається подвійним. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ;
; ;
;