|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. УСТАЛЕНИЙ
РУХ ЛІТАЛЬНИХ АПАРАТІВ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Під режимом горизонтального польоту розуміється сталий прямолінійний
рух вертольота з постійною швидкістю без набору висоти і зниження. У
горизонтальному польоті НГ працює в умовах косого обдування. Це більш
економічний режим роботи НГ, як порівняти з осьовим обдуванням, тому
що витрати потужності СУ є меншими. На режимі горизонтального польоту
вертоліт більш стійкий, має великі запаси керування, особливо на середніх
швидкостях польоту. Однак зі збільшенням швидкості зростає шкідливий опір
фюзеляжу і політ на швидкостях, близьких до максимальної, є напруженим як для
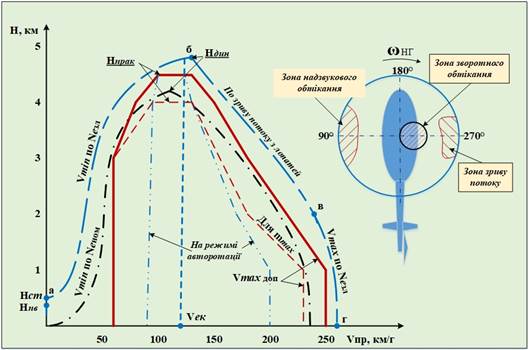
НГ, так і всієї конструкції вертольота. У практичній аеродинаміці вертольотів розрізняють такі
основні характерні швидкості горизонтального польоту: мінімальну,
економічну, крейсерську і максимальну (рис. 2.2.1).
На рис. 2.2.1 точки перетину кривих розрахункових і
необхідних потужностей за висотами визначають можливості висіння і польоту на
мінімальній швидкості (Vмін).
З погляду практичної аеродинаміки, така швидкість досить
універсальна. Під час польоту на економічній швидкості (Vек) забезпечуються найбільші
запаси поздовжнього, поперечного і шляхового керування, а також і запас за
кутом установки НГ від його збалансованого положення до використання
злітної потужності двигунів. Для цієї швидкості характерний максимальний
запас (надлишок) потужності під час виконання встановленого
горизонтального польоту. Наявний у цьому випадку максимальний надлишок
потужності можна реалізувати для отримання максимальної вертикальної
швидкості усталеного набору висоти за нахиленою траєкторією. Тому економічна
швидкість є водночас і найвигіднішою швидкістю (Vн,наб) усталеного набору висоти за нахиленою траєкторією (швидкість максимальної
скоропідйомності). Під час виконання горизонтального польоту на економічній
швидкості (Vек) досягається найбільша тривалість польоту. Під час виконання встановленого зниження за нахиленою
траєкторією на економічній швидкості
(Vек) за постійного (зменшеного, як порівняти з
горизонтальним польотом) значення потужності, а також і за зниження на
режимі самообертання НГ забезпечує мінімальну вертикальну швидкість.
Тому політ на зниження на економічній швидкості (Vек) іноді називають найвигіднішою
швидкістю зниження (планування). Зазвичай економічну швидкість указують для нормальної
злітної маси (mнорм) вертольота. Від зміни польотної маси вертольота значення економічної
швидкості є за такою залежністю:
За незначних змін маси цією поправкою можна знехтувати. За
збільшення шкідливого опору вертольота (за однієї і тієї самої маси), наприклад за рахунок
зовнішньої підвіски озброєння або вантажу на тросі тощо, значення економічної
швидкості трохи зменшується, тому що в цьому випадку збільшується потужність
на виконання руху. З практики відомо, що під час перевезення вантажів на
зовнішній підвісці більш економічний політ на меншій швидкості, ніж Vек, на 5–10 км/год. Зі збільшенням висоти польоту, зазвичай до 3000 м, економічна швидкість
за приладом (індикаторна) залишається незмінною.
Змінюється тільки її справжнє значення. На великих висотах економічна
швидкість зменшується внаслідок збільшення профільної потужності (зриву потоку з лопатей).
На рис. 2.2.1 точки перетину кривих потрібних і
наявних потужностей визначають значення максимальної швидкості (Vмакс) за висотою. Мінімальна і максимальна швидкості горизонтального польоту
за висотами визначають загалом діапазон можливих швидкостей і висот польоту
вертольота.
До висоти статичної стелі (НСТ, точка а) за mнорм.
і стандартних умов (MCA) вертоліт може виконувати
горизонтальний політ на приладовій швидкості (Vпр = 0), т. ч. на мінімальній
швидкості (Vмін = 0). На висоті понад статичну
стелю (Нст) для висіння не вистачає
розрахункової потужності (і тяги), тому горизонтальний політ можливий тільки
на поступальній швидкості, а саме коли НГ переходить на косе обдування
і можливості його зі створення тяги за злітної потужності двигунів
збільшуються. Під час польоту на мінімальній швидкості (Vмін) за Н >
Нст відсутні запаси за потужністю СУ і, зазвичай,
дуже малі запаси з шляхового керування, а також обмежено час роботи двигунів
на злітному (максимальному) режимі. Політ у цьому
випадку на деяких вертольотах супроводжується підвищеним рівнем тряски,
можливий самовільний рух вертольота.
2.1. Через зрив потоку з лопатей НГ (рис. 2.2.1, лінія бв). Зі збільшенням швидкості і
висоти польоту на лопаті, що відступає (в азимутах 270–3000) внаслідок збільшення швидкості змаху донизу і роботи
регулятора змаху місцеві кути атаки стають близькими до критичних, як
результат порушується плавність обтікання профілів лопаті в цьому секторі і
утворюється зрив потоку. Крім того, для деяких вертольотів характерне утворення
зриву потоку і в зоні зворотного обтікання (азимут 2700), і в зоні надзвукового
обтікання (азимут 900). По суті, зрив потоку – одна
з головних причин обмеження максимальних швидкостей польоту для всіх
вертольотів на висотах понад 1000–1500
м. Політ на цих швидкостях і відповідних їм висотах супроводжується
підвищеною тряскою (вібрацією) всього вертольота,
мимовільним креном його праворуч, розгойдуванням у поздовжньому і особливо в
поперечному напрямках, а також загальним погіршенням стійкості і керованості.
Підвищена вібрація вертольота під час польоту на цих швидкостях свідчить про
великі місцеві знакоперемінні навантаження лопатей НГ і системи
керування. 2.2. Через максимальну розрахункову потужність силової
установки за роботи
двигунів на злітному режимі – по Ne,взл
(рис. 2.2.1, крива вг). Під час польоту на цих
швидкостях Nр = Nгп.
і вертоліт не може збільшити швидкість у горизонтальному польоті через
відсутність запасу потужності і тяги НГ. Політ на цих швидкостях і
висотах обмежений також за часом роботи двигунів на злітному режимі. Завдяки конструктивному рішенню сучасні вертольоти в
льотній експлуатації не мають обмежень максимальних швидкостей польоту за
флатером лопатей несучого і рульового гвинтів, а також крила на тих
вертольотах, де воно встановлюється. Зазвичай швидкості, за яких можливе
виникнення флатера, перевищують максимальну, обмежену розрахунковою
потужність НГ, на 100–150
км/ч. Вони визначаються розрахунковим шляхом і потім
перевіряються під час випробувань на моделях. Найбільша висота польоту (точка б), де мінімальна швидкість
майже дорівнює максимальній і немає надлишку потужності, називається
динамічною стелею (Ндін) вертольота.
Практичне досягнення динамічної стелі вертольота
представляє певну складність, тому що час набору цієї висоти значно
перевищено час роботи двигунів на злітному режимі і, крім того, ускладнюється
техніка пілотування внаслідок близькості обмежень за зривом потоку з лопатей
і відсутності запасу за потужності СУ. Діапазон висот і швидкостей польоту вертольота змінюється залежно від
різних чинників: польотної маси вертольота, атмосферних умов (тиску, температури, вітру,
турбулентності атмосфери), режиму роботи двигунів і обертів НГ.
Збільшення маси вертольота призводить до зменшення висоти
статичної стелі вертольота. При цьому знижується і межа мінімальних
швидкостей польоту (рис. 2.2.1). Крім того, збільшення маси
вертольота за збереження висоти польоту, коли потужність Nе,взл = const призводить до необхідності
підвищення мінімальної швидкості польоту і зменшення максимальної. Тут чіткої
математичної залежності немає, але це бачимо за зміною потрібної потужності
для горизонтального польоту (рис. 2.2.1, а). Практично найбільш відчутно
скорочується діапазон швидкостей і висот польоту зі збільшенням маси
вертольота за рахунок зменшення статичної і динамічної стелі вертольота (приблизно, збільшення маси на 100 кг вище нормальної зменшує висоту
статичної і динамічної стелі на 100 м).
У реальних умовах на тій чи іншій висоті польоту як
температура, так і тиск повітря можуть відрізнятися від MCA. Це так
само призводить до зміни масової щільності повітря, а отже, і сил, що діють
на вертоліт. Під час виконання польотів поблизу обмежень необхідно для
визначення висоти встановлювати на барометричному приладі тиск 760 мм рт. ст. Зміна тиску на
висоті (відносно MCA) призводить до зміни тільки
істинної висоти польоту над місцевістю прольоту, а приладова висота
відповідатиме стандартним умовам. Тому зміну масової щільності потрібно
враховувати тільки залежно від температури зовнішнього повітря, відмінної від
стандартної для цієї висоти. Збільшення температури порівняно зі стандартною на цій
висоті призводить до зменшення масової щільності повітря, отже, падає
розрахункова і зростає необхідна потужність (рис. 2.2.1, б), як результат знижується
висота статичної і динамічної стелі і загалом скорочується діапазон
швидкостей і висот польоту.
Це призводить до збільшення мінімальних і зменшення
максимальних швидкостей польоту. Загалом політ в умовах інтенсивної бовтанки
є достатньо складним за технікою пілотування, і це необхідно враховувати,
скорочуючи діапазон швидкостей і висот польоту вертольота.
Знижений режим роботи двигунів зменшує значення
розрахункової потужності для НГ. При цьому зменшується висота
статичної і динамічної стелі вертольота, а саме значно скорочуються його
висотно-швидкісні властивості. На рис. 2.2.1 штрих-пунктирною лінією
показано діапазон висот і швидкостей польоту вертольота за використання
номінального режиму роботи двигунів і для нормальної злітної маси вертольота.
Зменшення обертів НГ призводить до зменшення тяги НГ.
Це можна компенсувати тільки збільшенням коефіцієнта тяги НГ (Ст), а саме за рахунок збільшення
загального кроку НГ. Зазвичай, збільшення загального кроку (φош) призводить до певного
зростання потрібної потужності на обертання НГ і зниження статичної
стелі за умови, що є достатній запас ходу правої педалі. Річ у тім, що
зменшення обертів НГ істотно знижує і величину сили тяги РГ. Як
результат падіння тяги РГ збільшується запас ходу вперед правої
педалі, що призводить (за знижених
запасів за ходом правої педалі) до встановлення її на упор. На
статичній стелі це може призвести до такого явища, як самовільний розворот
вертольота ліворуч. За розвороту вертольота ліворуч потрібна потужність на
обертання РГ ще додатково збільшується, що призводить так само до
додаткового відбору потужності від НГ і до ще більшого зменшення його
обертів, компенсувати яке збільшенням загального кроку НГ виявляється
неможливим, і вертоліт починає мимоволі знижуватися. Отже, на максимальних
швидкостях польоту падіння обертів НГ призводить до зменшення
максимальної швидкості (Vмакс)
як на висотах, де вона обмежується розрахунковою
потужністю, так і вище, де обмеження викликані зривом потоку з лопатей, що
відступають, через збільшення загального кроку НГ і потужності
горизонтального польоту (φош і Nгп). Тому зменшення обертів НГ під час польоту
на швидкостях, близьких до максимальної, небажано. Приблизно можна вважати,
що зменшення обертів НГ на 1%
(за вказівником) знижує максимальну швидкість
майже на 10 км/год. Польоти на швидкостях і висотах, що обмежують їх діапазон,
вважають польотами на критичних режимах і в льотній практиці, зазвичай,
заборонені, тому що для їх виконання пілот не має достатніх запасів за
потужністю СУ і керування, тому можливі мимовільні рухи вертольота,
які загрожують безпеці польотів. На рис. 2.2.1, як приклад, наведено експлуатаційний
діапазон швидкостей і висот польоту вертольота Мі-8 з нормальною польотною масою (Мнорм) для стандартних умов (суцільна лінія). Порівнюючи діапазон
можливих швидкостей і висот польоту (лінія абвг) з експлуатаційним, бачимо, що
на всіх висотах є певний запас за швидкістю польоту. За наявного запасу за
швидкістю і висотою, а саме за потужністю СУ і керування, пілот може
ненавмисно вийти за обмеження, якщо не контролюватиме швидкість, висоту й
інші умови польоту. За певного (негативного)
поєднання
деяких експлуатаційних чинників (збільшення
польотної маси, підвищення температури, зменшення тиску повітря, обертів НГ
тощо) можливе таке скорочення діапазону можливих швидкостей і
висот польоту, що він стає рівним експлуатаційному. У такому випадку
політ на межі експлуатаційного діапазону може супроводжуватися тими самими
явищами, що і під час польоту на межі діапазону можливих швидкостей і висот
польоту. Якщо пілот нехтуватиме врахуванням цих експлуатаційних
чинників, він може ненавмисно потрапити в умови, аналогічні польоту на
критичному режимі, тому в Керівництві з льотної експлуатації вказано
експлуатаційний діапазон швидкостей і висот польоту для максимальної злітної
маси вертольота (рис. 2.2.1). Отже, пілот, крім контролю
швидкості і висоти польоту, змушений ураховувати різні експлуатаційні чинники
та знати особливості поведінки вертольота під час польоту на критичному
режимі, щоб своєчасно прийняти правильне рішення і не допустити розвитку
аварійної ситуації в польоті, зокрема під час польоту на межі діапазону
можливих швидкостей і висот польоту.
Тому за ненавмисного зменшення швидкості менше мінімально
допустимої, особливо на висотах вище статичної стелі, необхідно негайно
перевести вертоліт НГ на розгін і, якщо є запас потужності СУ,
плавно збільшити загальний крок НГ до злітного режиму. Однак зменшення швидкості менше мінімально допустимої (Vмін.доп) дозволяється за Керівництвом
з льотної експлуатації тільки під час польоту на стелі висіння і нижче
для цієї (граничної) маси вертольота, визначеної
за номограмами, під час виконання спеціальних завдань (наприклад, рятувальних робіт з
висіння, висадки десанту тощо) і посадки по-вертолітному. Для деяких типів вертольотів можливі й інші причини
обмежень мінімально допустимої швидкості польоту. Крім того, можливе
обмеження мінімально допустимої швидкості (Vмін,доп) під час польоту на
швидкостях менше ніж 40 км/год
через нестійкість показань приладу повітряної швидкості, внаслідок складності
визначення швидкості візуально по землі за висіння на висотах понад 200 м тощо.
обмежена Керівництвом з льотної експлуатації для
забезпечення необхідного запасу керування, за віброміцністю елементів
конструкції вертольота, а також на випадок можливих помилок у техніці
пілотування, як-от різке переміщення ручки керування на себе, різке
збільшення загального кроку НГ, ковзання тощо. Тому за ненавмисного збільшення швидкості більше
максимально допустимої для цієї висоти польоту, особливо на висотах, де
основною причиною обмеження є зрив потоку і можливі мимовільний нахил
вертольота праворуч («валежка»), збільшення тряски, «затягування» в пікірування, слід негайно
зменшити швидкість польоту, для чого необхідно спочатку зменшити загальний
крок НГ, а потім плавно перевести вертоліт у набір висоти.
З огляду на складності техніки пілотування під час
виконання польоту на динамічній стелі для кожного типу вертольота в Керівництві
з льотної експлуатації вказано максимально допустиму висоту польоту з
такою (нормальною або
максимальною) масою. Ця висота називається практичною стелею
вертольота (Hпрак). Під час виконання польоту на
практичній стелі пілот має необхідний запас швидкості (рис. 2.2.1), приладової швидкості (Vпр = 90–130
км/год) і потужності СУ для витримування
встановленого режиму горизонтального польоту. Політ на межі експлуатаційного діапазону швидкостей і висот
польоту вважається польотом на граничному режимі, і перевищення встановлених
обмежень забороняється.
Залежно від швидкості усталений горизонтальний політ може
виконуватися на першому або другому режимах. Необхідність
такого поділу усталеного польоту пов’язана з низкою важливих особливостей
поведінки вертольота, які пілоту необхідно враховувати під час пілотування. Рівновага сил тяги НГ, шкідливого опору і сили ваги
вертольота в умовах прямолінійного горизонтального польоту на різних
швидкостях польоту може бути стійкою і нестійкою за умови витримування
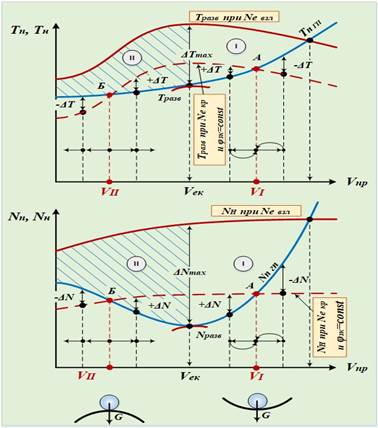
пілотом ручки керування, відсутності вертикальної швидкості (Vy = 0). З графіка зміни потрібних і наявних (що розвиваються) несучим гвинтом тяг (рис. 2.2.2) бачимо, що за підведення до НГ
однієї і тієї самої потужності Nподп
(загальний крок НГ постійний) усталений горизонтальний політ
може виконуватися як на попередній швидкості, так і на швидкості VI (точки перетину потрібної і
такої, що розвивається, тяг НГ a і
б). На швидкості VІ
(перший режим) в точці А рівновага сил Трозв
і Тгп стійка,
тому що за випадкової зміни швидкості, як порівняти із заданою, відбувається
така взаємна зміна рушійної сили НГ Тх і шкідливого опору вертольота Хв, що вертоліт без
зміни положення важеля загального кроку НГ відновлює вихідну швидкість
польоту. При цьому пілот, керуючи вертольотом, зберігає тільки
горизонтальність траєкторії (Vy
= 0). Наприклад, за входу в зустрічний потік повітря (зустрічний порив вітру) швидкість за приладом (Vnp) через короткий
проміжок часу відновиться до колишньої величини, але вертоліт щодо землі
летітиме з меншою шляховою швидкістю. Під час польоту на швидкості VII (точка Б) цього вже не
спостерігається. За випадкової зміни швидкості польоту VПР вертоліт під дією зміненого співвідношення
поздовжніх сил йтиме від початкового значення швидкості польоту за умови, що
загальний крок НГ залишається постійним і пілот ручкою керування чітко
витримує горизонтальність траєкторії (Vy
= 0). За випадкового збільшення швидкості, наприклад під
час входу в зустрічний потік повітря, швидкість за приладом збільшиться і
вертоліт почне розганятися, поки не вийде на швидкість VІ першого
режиму, де розрахункова тяга дорівнюватиме потрібній.
З наведеного прикладу бачимо, що для відновлення
початкового значення швидкості приладової швидкості (Vпр) в процесі витримування встановленого
горизонтального польоту необхідно змінювати положення загального кроку НГ,
з тим щоб зберегти необхідну рівновагу поздовжніх сил за випадкового його
порушення. Інакше кажучи, якщо під час виконання встановленого
горизонтального польоту в області першого режиму за випадкової зміни
швидкості немає необхідності змінювати значення загального кроку НГ («переміщати важіль «крок-газ»), то у разі виконання польоту
в області другого режиму за випадкової зміни швидкості необхідно змінити
загальний крок НГ, щоб своєчасно відновити порушену рівновагу сил. Отже, для виконання встановленого польоту на швидкостях
другого режиму (як порівняти з польотом на першому режимі) можна виокремити такі характерні особливості: 1) за дотримання горизонтального польоту випадкова зміна швидкості
викликає необхідність негайного переміщення важеля загального кроку НГ,
щоб забезпечити збереження швидкості й горизонтальності траєкторії (за випадкового збільшення
швидкості спільний крок НГ необхідно зменшити і в процесі повернення до
вихідної швидкості повернути його у вихідне балансувальне положення, а за
зменшення – збільшити і також у процесі повернення до вихідної
швидкості повернути в початкове положення), а саме доводиться
виконувати постійно подвійні рухи важелем загального кроку НГ,
особливо під час польоту в неспокійній атмосфері; 2) зменшення
швидкості в горизонтальному польоті від вихідної надалі
супроводжується прогресуючим падінням тяги, що розвивається НГ і
зростанням інтенсивності гальмування, особливо, якщо пілот за постійного
кроку НГ намагатиметься однією ручкою керування за рахунок збільшення
кута тангажу зберегти горизонтальність траєкторії (Vy – 0); 3) сталий
горизонтальний політ виконується за подвійних рухів важелем «крок-газ», що додатково порушує
оптимальні умови роботи двигунів і призводить до підвищеної витрати палива.
Межею, що розділяє сталі режими горизонтального польоту на перший і другий, є
економічна швидкість (Vек). За швидкостей польоту,
менших за економічну, горизонтальний сталий політ здійснюється на другому
режимі. Під час пілотування вертольота на швидкостях другого режиму слід
уважніше контролювати швидкість і висоту, тому що за зменшення швидкості (якщо пілот не збільшить крок
НГ) вертоліт утрачає висоту. Це особливо небезпечно під час
польоту на гранично-малих висотах. Хоча поділ на перший і другий режими
належить до усталених режимів польоту, однак, за невстановлених режимів усе ж
виявляються такі особливості. У льотній практиці за гасіння швидкості в горизонтальному
польоті (Vy = 0) пілоту необхідно
враховувати, що за зменшення швидкості від максимальної до економічної
спільний крок НГ слід зменшувати, а за подальшого зменшення швидкості
менше Vек,
навпаки, збільшувати. До того ж збільшувати загальний крок НГ
необхідно своєчасно з урахуванням прийомистості двигунів. Інтенсивність горизонтального гальмування в діапазоні
швидкостей першого режиму зменшується в міру падіння швидкості до економічної
швидкості (Vек), і гальмування може
припинитися, якщо крок зменшений до балансувального положення, відповідного
польоту, наприклад, на економічній швидкості (Vек), а в діапазоні швидкостей
другого режиму, навпаки, зростає. На практиці деякі пілоти часто плутають особливості
рівноваги сил на першому і другому режимах зі статичною стійкістю за
швидкістю. Тут є суттєва різниця, на яку слід звернути увагу. У визначенні статичної стійкості за швидкістю в основу
покладено дослідження рівноваги поздовжніх моментів, що визначає реакцію
вертольота за тангажем, на зміну швидкості, коли пілот у керування не
втручається. У визначенні та розподілі режимів усталеного польоту на
перший і другий в основу покладено дослідження стійкості рівноваги поздовжніх
сил, що визначають рух вертольота вздовж траєкторії за незмінного загального
кроку НГ, але за умови, що пілот увесь час ручкою керування балансує
вертоліт на такому режимі (Ту, = G і
Vy – 0), а саме керує вертольотом.
Найбільш складні умови з техніки пілотування за дотримання
заданого усталеного режиму за швидкістю характерні для польоту в умовах
поривів вітру на статично нестійкому за швидкістю вертольоті в діапазоні
швидкостей другого режиму.
Для горизонтального польоту швидкість обирається з вимог і
умов завдання: чи буде це політ для досягнення найбільшої дальності або
найбільшої тривалості, або це політ, на який необхідно витратити мінімальний
час, тощо. За обраними швидкостями, висотою польоту і польотною масою пілот
установлює заданий режим польоту. За дотримання заданого режиму він виконує
умови рівноваги, балансує вертоліт, а саме відхиляє важелі керування в певне
балансувальне положення, що відповідає цьому центруванню, швидкості і висоті
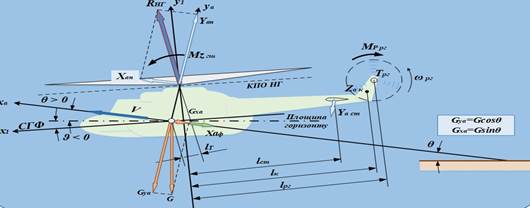
польоту, і потім їх невеликими відхиленнями витримує сталий режим польоту (рис. 2.2.3). Керувати вертольотом за
дотримання заданого режиму необхідно координовано і доцільно виконувати політ
без ковзання (з невеликим
креном γнв у той
чи інший бік). Цей балансувальний крен, що виключає ковзання,
водночас не має створювати і розворот, а саме курс має бути постійним, а за
відсутності бічного вітру не має бути і зносів у той чи інший бік. Політ без
ковзання, з енергетичної позиції, більш вигідний, тому що витрати потужності
менше (менше
шкідливий опір вертольота). При цьому, якщо виконати всі зазначені умови,
покажчик повороту і ковзання, встановлений у кабіні пілота вздовж осі вала НГ,
показуватиме за невеликого нахилу праворуч наявність правого ковзання (кульку на 1/8 діаметра праворуч від нейтралі). Якщо ж пілот спробує за
правого крену «загнати» кульку в центр, а саме
відхилить уперед праву педаль, то як результат вийде координований розворот
праворуч і курс збільшуватиметься. Інакше кажучи, особливістю одногвинтових
вертольотів потрібно вважати нормальне відхилення кульки від нейтралі за
балансувального значення крену, тому що це є результатом крену, а не
ковзання. Звичайно, якщо крен ще збільшити і водночас домагатися, щоб не
змінювався курс польоту, можливий уже політ із правим ковзанням і кулька піде
на половину свого діаметра від центра. На тих вертольотах, де є конструктивний нахил осі вала НГ
праворуч на кут 2,50
від вертикалі до підлоги кабіни екіпажу (до того ж авіагоризонт і покажчик повороту і ковзання встановлені не
вздовж осі вала НГ, а вздовж вертикалі до підлоги кабіни), політ без крену і за
положення кульки в центрі виконується без ковзання тільки на тих швидкостях,
на яких балансування кут крену вздовж осі НГ дорівнює 2,50. На інших
швидкостях можливий лівий крен за вказівником крену і тангажу (або за авіагоризонтом), отже, за його усунення
політ виконується з правим ковзанням, а за дотримання ще й кульки в
центральному положенні відбувається невеликий правий розворот. Ці особливості
слід враховувати під час польоту за приладами в закритій кабіні й у складних
метеоумовах. Під час пілотування одногвинтових вертольотів, зазвичай, не «ганяються за кулькою», а прагнуть витримати курс. Витримування встановленого горизонтального польоту на
швидкостях другого режиму має свої особливості, які необхідно враховувати
пілоту в інтересах безпеки, особливо в процесі польотів на гранично-малих
висотах в умовах сильної турбулентності атмосфери і поривчастого вітру. За випадкового збільшення швидкості польоту, щоб не було
набору висоти і подальшого розгону, пілот має своєчасно перемістити донизу важіль
«крок-газ», дотримуючись при цьому координації і певної відповідності
рухів важелями керування для збереження висоти і напрямку польоту. Якщо з яких-небудь зовнішніх причин швидкість польоту
зменшилася, щоб не допустити зниження і падіння швидкості, пілот має
своєчасно перемістити важіль «крок-газ» догори, також дотримуючись координації і відповідності
рухів іншими важелями керування. Після того як швидкість відновиться до заданої, необхідно
плавно перемістити важіль «крок-газ», ручку керування й педалі в початкове положення. Виконання польоту на швидкостях першого режиму, а саме на швидкостях вище
економічної, більш просте. Після ретельного балансування вертольота на
заданому режимі й зняття навантаження з ручки керування і педалей (тримування) на деяких вертольотах можна «кинути» керування (зокрема важіль
«крок-газ») і вертоліт протягом досить тривалого часу (до 1–2 хв) здатний зберігати заданий йому режим польоту. Техніка пілотування за дотримання режиму ще більш
спрощується у разі виконання польоту з увімкненим автопілотом або САУ.
За пілотом залишається тільки функція контролю і періодичного балансування.
Набір висоти за нахиленою траєкторією є основним видом
набору висоти вертольотом і застосовується у всіх випадках, коли дозволяють
умови. Такий набір висоти, як порівняти з вертикальним підйомом,
економічніший, тому що НГ працює в режимі косого обтікання. На цьому
режимі можна отримати найбільшу вертикальну швидкість усталеного набору і
досягти динамічної стелі польоту вертольота, яка, зазвичай, у кілька разів
більше статичної.
Техніка пілотування на цьому режимі майже не відрізняється
від виконання горизонтального польоту. Різниця тільки у величині потрібної
потужності (потрібного
значення загального кроку НГ), яка завжди під час набору
висоти трохи більше, ніж для таких самих умов горизонтального польоту. З
підйомом на висоту необхідно враховувати висотність двигунів, тому що за
зменшення їх потужності пілоту доводиться відповідно зменшувати загальний
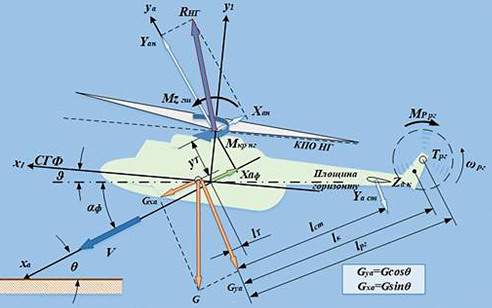
крок НГ, щоб оберти НГ залишалися в межах допустимих. Для початку виконання набору висоти слід збільшити тягу НГ
(Тнв) (рис. 2.2.4). З цією метою пілот збільшує
загальний крок НГ і підводить додаткову потужність (створює надлишок потужності). При цьому збільшується підіймальна
сила (Ту,), зростає нормальне
перевантаження і траєкторія вертольота викривляється вгору. Після досягнення
заданої вертикальної швидкості необхідно припинити подальше викривлення
траєкторії, для чого пілот віддає ручку керування від себе. Збалансувавши
вертоліт на траєкторії відповідним відхиленням важеля «крок-газ», ручки керування і педалей, пілот витримує постійними
вертикальну й поступальну швидкості за траєкторією.
Режим набору висоти за нахиленою траєкторією може виконуватися
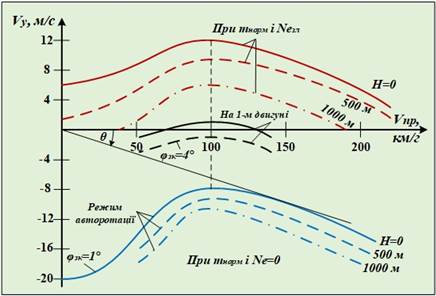
на різних швидкостях польоту вертольота. На рис. 2.2.5 наведено
основні, характерні для усіх вертольотів закономірності зміни вертикальної
швидкості (Vy) від швидкості польоту за траєкторією.
Максимальну вертикальну швидкість усталеного набору можна отримати під час
польоту на економічній швидкості (Vек) і за роботи двигунів на
злітному режимі. З підйомом на висоту через падіння надлишку потужності
зменшується і вертикальна швидкість. На сталому режимі набору висоти за нахиленою траєкторією,
як і в горизонтальному польоті, в наборі висоти можна виокремити перший і
другий режими польоту. На швидкостях менше швидкості найвигіднішого набору
висоти (Vн,наб) за дотримання постійної
швидкості пілот пілотує вертоліт так само, як і на другому режимі
горизонтального польоту. У такому випадку за випадкового збільшення
швидкості, але за збереження заданої вертикальної швидкості (наприклад, 2 м/с), вертоліт прагне ще більше
збільшити швидкість польоту. Якщо не зменшувати потужність, а саме не
переміщувати важіль «крок-газ» і зберігати вертикальну швидкість постійною, вертоліт продовжуватиме
збільшувати швидкість до відповідної швидкості на першому режимі, за якої
надлишок потужності дасть змогу витримувати задану вертикальну швидкість.
Під час виконання усталеного набору висоти на швидкостях
другого режиму польоту (Vпр < Vек) необхідно витримувати
постійними водночас і поступальну, і вертикальну швидкості. Тому в процесі
польоту в неспокійній атмосфері пілоту доводиться переміщати важіль «крок-газ» донизу за випадкового збільшення швидкості, догори – за
зменшення швидкості. За виконання усталеного режиму набору висоти на швидкостях
першого режиму (на відміну від
другого) переміщати важіль загального кроку НГ немає
необхідності, тому що за випадкової зміни швидкості польоту за траєкторією
з’являється надлишок або нестача потужності витрачається на відновлення
заданої приладової швидкості за умови, що пілот витримує постійною
вертикальну швидкість (Vy = 2 м/с = const) відхиленням ручки керування. Витримування тривалого сталого режиму набору висоти дуже
складне, тому що з її збільшенням змінюється потужність двигунів. Через це за
постійного загального кроку НГ зменшується надлишок потужності. Отже,
витримування встановленого набору висоти без додаткового збільшення
загального кроку НГ неможливе. На практиці іноді збільшується висота
за постійного загального кроку НГ. У цьому випадку витримується
постійною тільки швидкість за приладом (наприклад, Vек = Vн.наб), а вертикальна швидкість за
варіометром поступово зменшуватиметься. На висоті, де двигуни за заданого
кроку НГ вийдуть на злітний режим, необхідно стежити за обертами НГ
і відповідно змінювати загальний крок НГ за збереження максимального
злітного режиму роботи двигунів. З цього моменту вертикальна швидкість
починає падати швидше, тому що значно падає надлишок потужності. З підйомом на висоту внаслідок зменшення вертикальної
швидкості зменшується і кут нахилу траєкторії, який на висоті динамічної
стелі дорівнюватиме нулю. В інтересах набору висоти за мінімальний час
рекомендовано витримувати швидкість, що дорівнює економічній, під час роботи
двигунів на максимальному режимі. При цьому необхідно стежити за часом
безперервної роботи двигунів на цьому режимі, який, зазвичай, обмежений. Зниження вертольота за нахиленою траєкторією може виконуватися як за
працюючих двигунів (моторне
зниження), так і в режимі самообертання несучого гвинта (зниження на РСНГ). Зниження вертольота за нахиленою траєкторією з поступальною
швидкістю за працюючих двигунів є основним видом зниження і застосовується у
всіх випадках, коли дозволяють умови. Воно вимагає меншої потужності, як
порівняти з вертикальним зниженням, отже, більш економічне. За такого
зниження можна отримати будь-яку малу вертикальну швидкість і будь-який малий
кут нахилу траєкторії. Цим зниження за нахиленою траєкторією вигідно
відрізняється від планування на РСНГ. Зниження на РСНГ по своїй суті нагадує зниження
вертольота з вимкненим двигуном (без тяги), тому що в цьому випадку
зміна потенційної енергії вертольота переходить у кінетичну енергію обертання
НГ, а саме на створення тяги для польоту зі зниженням. Зниження на РСНГ – це не аварійний політ, а звичайний, чітко розрахований і
безпечний режим польоту. Цей режим застосовується не тільки в разі відмови
двигунів (двигуна), але і для термінового
зниження, з навчальною метою. За зниження за нахиленою траєкторією як за працюючих, так і
вимкнених двигунів НГ працює в умовах косого обдування. При цьому
зберігаються достатні стійкість і керованість, досить великі запаси у
відхиленні важелів керування і простіше техніка пілотування, ніж на
вертикальному зниженні. Крім того, виключається можливість виникнення вихрового
кільця, тому таке зниження більш безпечне.
Зниження за нахиленою траєкторією виконують, коли
підводиться до НГ потужність менше потрібної потужності для горизонтального
польоту. Недостатня потужність для сталого польоту на тій самій швидкості, що
і в горизонтальному польоті, підводиться до НГ від повітряного потоку
за рахунок зміни потенційної енергії за зниження. Тому залежно від ступеня
дроселювання двигунів і швидкості польоту за траєкторією витримуватимуться
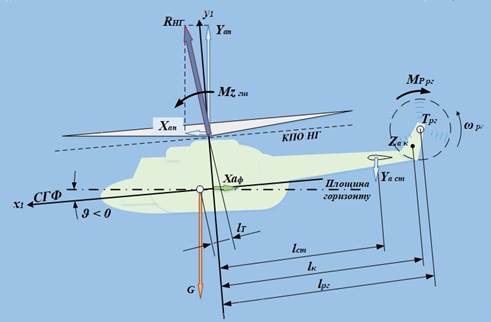
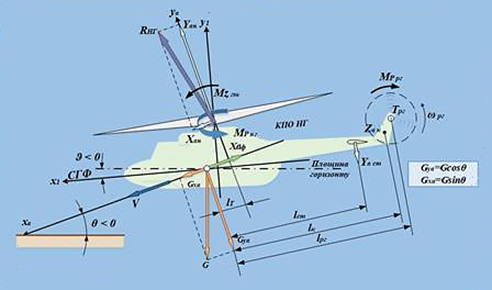
вертикальна швидкість зниження і відповідний кут нахилу траєкторії (ϴ). За повного дроселювання двигунів вертоліт знижується на РСНГ. За сталого зниження за нахиленою траєкторією всі сили і
моменти, що діють на вертоліт, мають бути врівноважені (рис. 2.2.7). Це досягається пілотом у
процесі балансування. Техніка пілотування фактично мало відрізняється від
горизонтального польоту. Тут також можна виокремити перший і другий режими
усталеного зниження за нахиленою траєкторією. За дотримання постійними
приладової і вертикальної швидкостей (Vпр
і Vу) пілот
змушений у міру втрати висоти коригувати падіння вертикальної швидкості
відповідним зменшенням загального кроку НГ. Зменшення загального кроку
НГ тут зумовлено збільшенням потужності (ΔN). Вертикальна швидкість зниження (за однієї і тієї самої приладовій швидкості (Vпр) залежить від установленої потужності двигунів,
польотної маси вертольота, атмосферних умов і виcоти польоту. На рис.
2.2.6 показана залежність вертикальної швидкості зниження від швидкості
зниження на РСНГ. Якщо проаналізувати залежність вертикальної швидкості
зниження від швидкості польоту вертольота, то найменша вертикальна швидкість
буде досягатися на економічній швидкості. Як за зменшення поступальної
приладової швидкості (Vпр),
так і за збільшення більш економічної швидкості (Vек) (за постійного
загального кроку НГ) вертикальна швидкість зниження збільшується. Отже, з погляду оптимальності руху за траєкторіями
зниження, під час виконання практичних завдань можна виокремити дві швидкості
зниження. В інтересах мінімальної годинної витрати, а саме тривалішого планування за
певного запасу палива, краще зниження і планування виконувати на економічній
швидкості (Vек)
для такого типу вертольота. В інтересах же максимальної дальності планування,
а також за зниження на найбільшу дальність за найменшої кілометрової витрати
палива зниження і планування доцільно виконувати на швидкості більшій, ніж
економічна, приблизно на 50–60 км/год. Цю швидкість можна
отримати, якщо провести дотичну з початку координат до кривої вертикальних
швидкостей. На вертольотах, на відміну від літаків, часто дуже важко
визначити кут нахилу траєкторії, тому що і в горизонтальному польоті, і в
наборі висоти, і на зниженні кут тангажу змінюється незначно, тоді як кут
нахилу траєкторії (θ) може змінюватися від нуля до 900 (за вертикального зниження). Це завдання можна дещо
спростити, якщо побудувати вказівник глісади планування і зниження. У цьому
випадку доцільно будувати залежність вертикальної і приладової швидкостей (Vy від Vпр)
в однаковому масштабі осей абсцис і ординат. З огляду на те, що приймач
повітряної швидкості вимірює не швидкість польоту за траєкторією, а її
горизонтальну складову, а саме, приблизно, ту саму швидкість, що і в
горизонтальному польоті, і, крім того, до висоти H = 1000 м – приладову швидкість (Vпр) можна вважати рівною істинній швидкості (Vi), справедливо рівняння Vy = Vпр tg
θ. За цією формулою розраховують значення кута тангажу (θ), що близькі до практичних, на швидкостях польоту від 50 км/год до максимальної.
Кути нахилу траєкторії можна визначити графічно, якщо провести через точку,
відповідну швидкостям приладової і вертикальної (Vпр і Vy), лінію, що сполучає цю точку на вказівнику з
початком координат (рис. 11.2.7). Кут між проведеною лінією і
віссю приладової швидкості (Vпр)
і є кут нахилу траєкторії (θ). Зниження за працюючих двигунів за нахиленою траєкторією
може виконуватися на різних поступальних швидкостях польоту вертольота аж до
максимально допустимих. Однак ширяння на РСНГ має обмеження за
мінімально і максимально допустимими швидкостями польоту за висотами через
можливе збільшення вертикальної швидкості внаслідок падіння обертів НГ
(рис. 2.2.7).
Перехід на РСНГ одногвинтових вертольотів за відмови
(вимкнення) двигунів супроводжується
енергійним «кидком» вертольота за курсом і креном
праворуч з одночасним падінням обертів НГ. Це прагнення виникає
внаслідок різкого падіння до нуля крутного моменту, а реактивний момент НГ
на фюзеляж не передається. При цьому порушується насамперед рівновага
шляхових, а потім і поперечних моментів. Під дією моменту від сили тяги РГ
вертоліт енергійно розвертається праворуч, що зумовлює виникнення лівого
ковзання і призводить до крену також праворуч. На додаток до цього пілот,
реагуючи передусім на зміну напрямку, переміщує вперед ліву педаль. При цьому
зменшується тяга РГ, а поперечна сила тяги (Тz) на плечі уТ створюватиме
неврівноважений додатковий момент на збільшення крену праворуч. Що більше
швидкість польоту, то більше реактивний момент. На максимальних швидкостях польоту кутова швидкості крену
праворуч може досягти 200/с
і більше. Якщо пілот запізниться зі своєчасним відхиленням важелів керування,
то через 1,5–2 с
крен може досягти 400.
На гранично-малих висотах це може призвести до небажаних наслідків. Із
перерахованих тенденцій вертольота випливають необхідні дії пілота.
Насамперед пілот має подбати про збереження обертів НГ. Для цього слід
негайно зменшити загальний крок НГ. Водночас ручка керування
відхиляється ліворуч і дається енергійно вперед ліва педаль. Переміщення ручки керування в поздовжньому напрямку має
свої особливості залежно від вихідної швидкості польоту. На малих
швидкостях ручка керування енергійно має віддаватися від себе з метою
виходу в процесі зниження на економічну швидкість (або близьку до неї) для такого типу вертольота. Якщо врахувати
перераховані вище тенденції вертольота за креном, сумарний рух ручки
керування в цьому випадку на одногвинтових вертольотах буде вздовж діагоналі,
від себе і ліворуч. На
максимальних швидкостях і близьких до них, особливо на гранично малих
висотах, ручку керування необхідно енергійно відхилити вздовж діагоналі, на
себе і ліворуч, і збільшити кут тангажу на 10–150 від початкового значення для
запобігання швидкій втраті висоти. Таке переміщення ручки керування з одночасним скиданням
загального кроку НГ і лівої педалі вперед забезпечує найкращі (оптимальні) умови переходу НГ на режим
самообертання. Поздовжнє переміщення ручки керування на себе на великих
швидкостях польоту переводить НГ на позитивні кути атаки, а саме на
режим, за якого майже за будь-якого початкового значення загального кроку
потрібна потужність на обертання НГ зменшується. Як результат такого
переміщення ручки керування оберти НГ зберігаються і навіть
збільшуються, якщо пілот одночасно зменшуватиме загальний крок НГ. Ба
більше, енергійне переміщення ручки керування на себе на великих швидкостях
створює додаткове збільшення підйомної сили НГ (Ту), а отже, збільшиться нормальне перевантаження, що
призводить до переведення вертольота в набір висоти. Отже, з’явиться (нехай короткочасно) позитивна вертикальна швидкість.
Можливий невеликий набір висоти, який залежить, зазвичай, від ступеня
завантаження вертольота, його маси, початкової швидкості й висоти польоту. Звичайно, перераховані дії призведуть до досить енергійного
гальмування вертольота. Тут важливо за зменшення швидкості до економічної (Vек) своєчасно перевести вертоліт на планування, не
допускаючи його подальшого падіння. Переміщення ручки керування від себе за
відмови двигунів на швидкості, близькій до максимальної, є помилкою. Таке
переміщення ручки керування з одночасним скиданням загального кроку НГ
і віддачею вперед лівої педалі призводить у цих умовах до додаткового крену
вертольота праворуч під дією гіроскопічного моменту НГ. Крім того,
хоча оберти НГ і зберігаються, на цій швидкості польоту вертоліт
швидко, майже через 1,5–2 с,
розвиває велику вертикальну швидкість зниження (на деяких вертольотах – до 20 м/с). Щоб погасити її, недостатньо виконати дії, докладно
описані вище. На гранично-малих висотах 50
м висоти за таких дій можна втратити за 1,5–2 с. Посадка ж на РСНГ на великій
поступальній швидкості може призвести до льотної пригоди. Збалансувавши вертоліт на плануванні відповідним відхиленням
важелів керування, пілот надалі витримує сталість вертикальної і поступальної
швидкостей невеликими відхиленнями ручки керування. При цьому на вертоліт
діятимуть сили і моменти, які схематично зображено на рис. 2.2.7. На
відміну від зниження з використанням потужності двигунів, у цьому випадку НГ
передає на фюзеляж реактивний момент (Mкр), який прагне розвернути ніс
вертольота праворуч. Цей шляховий момент пілот урівноважує моментом від сили
тяги РГ, яка спрямована тепер уже праворуч. Щоб не було ковзання, ця
сила врівноважується складовою поперечної тяги НГ (Tz), спрямованої в протилежний бік, тобто ліворуч.
Виконуючи тривале планування, пілот потрібен стежити за
обертами НГ, не допускаючи виходу їх за обмеження. Планування на
великих висотах здійснюється за більшого значення загального кроку НГ.
Зі зменшенням висоти за збереження обертів НГ спільний крок НГ
дещо зменшується. Не слід переміщенням ручки керування на себе намагатися
збільшити оберти НГ. У такому випадку оберти НГ збільшуються
короткочасно, тільки в період переміщення ручки керування. Надалі вони почнуть
зменшуватися в міру гасіння поступальної швидкості. Цією особливістю –
короткотимчасовим збільшенням обертів НГ за енергійного переміщення
ручки керування на себе – доцільно користуватися, тільки виконуючи
вирівнювання перед посадкою. Для забезпечення оптимальних умов на посадці треба до
передпосадкового зниження зберігати швидкість планування не менше економічної
(Vек) і оберти НГ
не менше мінімально допустимих, щоб потім за енергійного вирівнювання
використовувати цей запас кінетичної енергії руху вертольота і обертання НГ
для виконання безпечного приземлення. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 .
.