|
|
|
АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ
ПРОЦЕСІВ І СИСТЕМИ АВТОМАТИЧНОГО
КЕРУВАННЯ Електронний посібник |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1. ОСНОВИ АВТОМАТИЗАЦІЇ СІЛЬСЬКОГОСПОДАРСЬКОГО ВИРОБНИЦТВА |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1.4. Вибір елементів
систем автоматизації 1.4.1. Вибір елементів систем автоматизації 1.4.2. Вибір, налагодження частотних перетворювачів 1.4.3. Характеристика та критерії вибору мікроконтролера 1.4.4. Характеристика та вибір провідних та безпровідних ліній зв’язку 1.4.5. Загальна характеристика і класифікація інтерфейсів 1.4.6. Вибір щитів і пультів керування 1.4.7. Розміщення приладів і засобів
автоматизації 1.4.8. Проєктування віртуальних пристроїв в середовищі LabWIEW
·
захисні,
· командні, · проміжні, · виконавчі, · сигнальні.
Під час вибору елементів потрібно
враховувати режими роботи робочих машин та механізмів, вимоги до техніки
безпеки, протипожежні правила.
До них належать шляхові та кінцеві вимикачі,
поплавкові, манометричні, температурні та інші реле, контактні термометри
тощо. Шляхові та кінцеві вимикачі призначені для замикання і розмикання кіл
керування за допомогою упорів (кулачків) в автоматизованих установках, де
потрібна подача командних імпульсів за певного положення механізму (рис.
1.4.1).
Вони можуть мати контакти миттєвої та немиттєвої дії. Шляхові та кінцеві вимикачі
з контактами немиттєвої дії можна застосовувати в тих випадках, коли машина
рухається зі швидкістю 0,4 м/хв, за швидкостей менших за 0,4 м/хв потрібно
застосовувати кінцеві і шляхові вимикачі з миттєвим розмиканням контактів. Командні
апарати вибирають за напругою, струмом, кількістю і видом контактів, виконанням
захисту від довкілля.
До проміжних апаратів можна віднести реле
напруги різних типів, реле часу тощо. Промисловість випускає проміжні реле різних серій РП, ПЕ,
МКУ та ін. Вони різняться напругою котушки, кількістю і видом
(замикаючий, розмикаючий) контактів та розривною
потужністю контактів або струмом, які можуть комутувати контакти. Із всіх можливих типів реле потрібно вибирати те,
яке споживає найменшу потужність (рис.
1.4.2). Реле часу створює витримку часу
між моментом подачі командного імпульсу на замикання або розмикання кола керування та моментом
здійснення цих операцій (рис. 1.4.3).
Деякі реле часу (програмні реле) мають
багатоконтактну систему і керують низкою процесів у наперед заданій
послідовності. За принципом дії сповільнювального органу реле часу поділяють
на механічні (маятникові), електромеханічні, моторні, електромагнітні,
електропневматичні, електронні та ін. Реле часу вибирають за витримкою часу (витримка часу
визначається ходом технологічного процесу), за напругою живлення,
розривною потужністю контактів, кількістю програм тощо.
Датчик вибирають так, щоб величина, яку він вимірює знаходилась
у межах 1/3–2/3 діапазону його шкали. Струм, який може комутувати датчик має бути
більшим робочого струму Ін.а.
До виконавчих апаратів автоматизованого і автоматичного
керування відносяться електромагнітні пускачі, контактори, електромагнітні клапани, виконавчі механізми з електродвигунним приводом, який може
бути однообертовим і багатообертовим. До однообертових відносяться механізми типу МЕОБ, МЕСК, ДР-М, ДР-ІМ,
ІМ-2/120, ІМТМ-4/25, до багатообертових механізми типу МЕМ, двигуни
постійного струму типу МІ, СЛ, ДПМ. Особливістю однообертових виконавчих
механізмів є те, що їх вихідний вал обертається з постійною швидкістю на кут
не більший ніж 360°. Необхідний кут повороту встановлюється за допомогою
кінцевих вимикачів.
Виконавчі механізми з електродвигуним приводом вибирають
залежно від значень моменту необхідного для приводу заслінок (рис. 1.4.4). Момент обертання
заслінки визначають за формулою:
де К =
(2...3) – коефіцієнт, що враховує затяжку сальників і забрудненість
трубопроводу; МР – реактивний момент, обумовлений намаганням потоку речовини закрити
заслінку; Мт – момент тертя в
опорах. Реактивний момент визначають за формулою
де Рр.о.
– перепад тиску на заслінці (рекомендується приймати рівним надлишковому
тиску перед заслінкою); ДУ – діаметр заслінки. Момент тертя в
опорах:
де Рн
– надлишковий тиск перед заслінкою; Гш – радіус шийки вала заслінки; X – коефіцієнт тертя в
опорах (Х= 0,15). Момент обертання на валу виконавчого механізму
повинен бути не меншим моменту необхідного для приводу заслінки:
До звукових сигнальних апаратів належать дзвінки,
сирени, ревуни. Деякі типи сигнальних звукових апаратів наведено в
табл. 1.15. Таблиця 1.15 Технічна характеристика звукових
сигнальних апаратів
До світлових апаратів сигналізації належать сигнальні
лампи. Промисловість випускає арматуру для сигнальних ламп різних типів АЕР –
з лампами розжарювання потужністю 10 Вт і АСЛ – з люмінесцентними лампами (рис. 1.4.5). В арматуру вмонтовано баластні опори.
Сукупність сигнальних, релейних і комутаційних апаратів
утворює систему сигналізації. Залежно від призначення системи сигналізації
вони бувають: інформаційні, попереджувальні, аварійні. Сигналізація положення інформує обслуговуючий персонал
про стан і положення електричних апаратів, машин і кіл, наприклад,
електродвигун увімкнено, справний чи несправний тощо. Сигнальні
апарати вибирають за напругою, кольором лінз. Для сигналізації положення
застосовують, білі, жовті, зелені лінзи. Для аварійної сигналізації – червоні.
·
типу та потужності електродвигуна, що
підключається, ·
точності і діапазону регулювання швидкості, ·
точності і підтримки моменту обертання на валу
двигуна. · розміри, · форма, ·
можливість винесення пульта управління та ін. Під час роботи зі стандартним асинхронним
двигуном перетворювач слід вибирати з відповідною потужністю. Якщо потрібен
великий пусковий момент чи короткий час розгону або уповільнення, вибирайте
перетворювач вище номінального.
Під час вибору перетворювача для роботи зі
спеціальними двигунами (двигуни з гальмами, заглибні двигуни, синхронні
двигуни, високошвидкісні тощо) слід керуватися, перш за все, номінальним
струмом перетворювача, який має бути більше номінального струму двигуна, а
також особливостями настройки параметрів перетворювача. У цьому випадку,
бажано проконсультуватися з фахівцями постачальника.
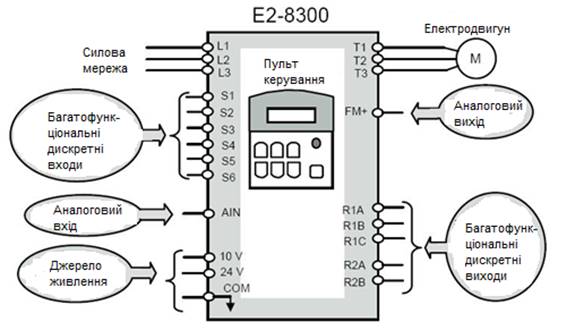
Рис. 1.4.7. Підключення
малогабаритного векторного перетворювача частоти Веспер E2-8300 1. Застосовувати частотний метод (U/f) у випадках, коли залежність моменту
навантаження двигуна відома і навантаження практично не змінюється за одного
і того ж значення частоти, а так само нижня межа регулювання частоти не нижче
5–10 Гц за незалежного від частоти моменту. Під час роботи на відцентровий
насос або вентилятор (це типові навантаження з моментом, що залежать від
швидкості обертання) діапазон регулювання частоти – від 5 до 50 Гц і вище.
Також під час роботи з двома і більше двигунами. 2. Частотний зі зворотним зв'язком за швидкістю (U/f з датчиком) – для прецизійного регулювання
(необхідно використовувати інкрементальний енкодер. Енкодер – це цифровий датчик кута повороту з відомою залежністю моменту
від швидкості обертання (рис. 1.4.8).
3. Векторний – для випадків, коли в процесі
експлуатації навантаження може змінюватися на одній і тій же частоті, тобто
немає чіткої залежності між моментом навантаження і швидкістю обертання, а
також у випадках, коли необхідно отримати розширений діапазон регулювання
частоти за номінальних моментів, наприклад, 0–50 Гц для моменту 100% або
навіть короткочасно 150–200% від Мном. Векторний метод працює нормально, якщо
введені правильно паспортні величини двигуна і успішно пройшло його
автотестування. Цей метод реалізується шляхом складних розрахунків у
реальному часі, вироблених процесором перетворювача на основі інформації за
вихідного струму, частоти і напруги. Процесором використовується також
інформація про паспортні характеристики двигуна, які вводить користувач. Час
реакції перетворювача на зміну вихідного струму (моменту навантаження)
становить 50–200 мсек. Векторний метод дозволяє мінімізувати реактивний струм
двигуна під час зменшення навантаження шляхом адекватного зниження напруги на
двигуні. Якщо навантаження на валу двигуна збільшується, то перетворювач адекватно
збільшує напругу на двигуні. 4. Векторний зі зворотним зв'язком за швидкістю –
для прецизійного регулювання (необхідно використовувати інкрементальний
енкодер) швидкості, коли в процесі експлуатації навантаження може змінюватися
на одній і тій же частоті, тобто немає чіткої залежності між моментом
навантаження і швидкістю обертання, а також у випадках, коли необхідний
максимальний діапазон регулювання частоти за моментів близьких до
номінального. Перетворювач Веспер E2-8300 є векторним перетворювачем частоти без зворотного
зв'язку. Може працювати як в режимі векторного, так і в режимі скалярного
управління. Програмування режимів роботи перетворювача проводиться
користувачем в константі 0-00. Скалярний режим (U/f) є основним і застосовується для простого управління
швидкістю електродвигуна в більшості застосувань. Векторний режим необхідний
у випадку підвищених вимог до точності підтримки швидкості обертання
електродвигуна. Перетворювачі
частоти Е2-8300 розраховані на потужності двигунів від 0,4 кВт до 55 кВт.
Основні застосування перетворювача частоти Е2-8300 – управління агрегатами з
невисокою динамікою зміни навантаження і невеликим діапазоном регулювання за
швидкістю: водяні насоси, вентилятори, конвеєри тощо. · розвинений
інтерфейс (6 дискретних входів, 2 дискретних виходи, 2 аналогових входи, 1
аналоговий вихід, лінія послідовної зв'язку з комп'ютером RS-232, додатковий
конвертер інтерфейсів RS-232/485); ·
спрощений знімний пульт управління (з чотирирозрядним 7-сегментним
індикатором) з можливістю його виносу на максимальну відстань до 5 м; ·
можливість перенесення встановлених користувачем значень констант з
одного перетворювача в інший за допомогою модуля копіювання; · вбудований
програмований логічний контролер. Скалярне
управління перетворювача виконується за допомогою регулювання відносини
напруги / частота (U/f) в розімкнутому контурі. Перетворювач
частоти працює в режимі джерела напруги і формує в обмотки статора
електродвигуна амплітуду і частоту напруги за даними U/f, встановленими користувачем. Скалярний режим
застосовується для управління механізмами, які не потребують глибокого
регулювання швидкості обертання, великого стартового моменту і високих
динамічних характеристик (насоси, вентилятори, конвеєри та ін.).
·
до частотного перетворювача підключено одночасно кілька електродвигунів; ·
технологічний параметр має підтримуватися на заданому рівні в режимі зі
зворотним зв'язком від зовнішнього датчика (наприклад, тиск води у
водопроводі); ·
точні дані електродвигуна невідомі і автонастроювання у векторному режимі
не проходить; ·
потужність електродвигуна менше потужності частотного перетворювача більш
ніж на один типорозмір. Векторний
режим (константа 0-00 = 0000
або новий 0001) необхідний для управління електродвигуном в розширеному
діапазоні швидкостей і з більш високою точністю регулювання швидкості. Для
правильного функціонування перетворювача в векторному режимі потрібно
ввімкнути «Автонастройка». Під час роботи у векторному режимі, залежно від
навантаження на валу, частотний перетворювач визначає неузгодженість між
векторами потокозчеплення ротора і статора, і шляхом частотної компенсації
вихідної силової напруги підтримує цю неузгодженість оптимальною, зокрема, в
області малих частот, які можна порівняти з частотою ковзання. Управління
здійснюється в діапазоні швидкостей 1:50 з високим стартовим моментом (до
150%) і дозволяє подолати важкий старт машин навіть без датчика зворотного
зв'язку. Дозволяє обертати двигун з високою точністю в діапазоні швидкостей
обертання від 0,02Nmax до Nmax,
незалежно від впливу навантаження. Точність підтримки швидкості в векторному
режимі (без датчика зворотного зв'язку) ± 0,5% за зміни навантаження від 0 до
100%. Частотний
перетворювач дозволяє здійснити в цьому режимі легкий старт механізмів на
малих частотах та широкий діапазон точного регулювання швидкості. В останні роки під
час розробки систем управління об'єктами різного типу та рівня складності все
більше уваги приділяється мікроконтролерній техніці. Це пов'язано з її
бурхливим розвитком і широким асортиментом пропонованої продукції.
Під час розробки пристрою виникає необхідність у виборі
мікроконтролера, що задовольняє вимогам за продуктивністю, надійністю,
умовами застосування та ін.
Основна мета – обрати мікроконтролер (рис. 1.4.9) з мінімальною ціною (щоб знизити
загальну вартість системи), але в той же час задовольняє системної
специфікації, тобто вимогам за продуктивністю, надійністю, умовами
застосування. Загальна вартість системи включає все: інженерне дослідження та
розробку, виробництво (комплектуючі і праця), гарантійний ремонт, оновлення,
обслуговування, сумісність, простоту в обігу тощо. Другий крок – пошук
мікроконтролерів, які задовольняють всім системним вимогам. Він звичайно
включає підбір літератури, технічних описів і технічних комерційних журналів,
а також демонстраційні консультації. Остання стадія
вибору складається з кількох етапів, мета яких – звузити список прийнятних
мікроконтролерів до одного. Ці етапи включають аналіз ціни, доступність,
засоби розробки, підтримку виробника, стабільність та наявність інших
виробників. · розрядність
обчислювального ядра; ·
набір вбудованих периферійних пристроїв (таймери, АЦП і т.п.); · наявність
бітових операцій; ·
апаратну організацію обробки даних (структура машинного циклу, співвідношення
тактів ГТВ і машинних циклів); ·
можливість робота з переривання, за зовнішнім сигналом готовності або за
командами людини; ·
кількість керованих портів введення або виводу, характер передачі – байт
або бітів, програмна настройка напрямку передачі; ·
тип пристроїв введення або виводу, якими має управляти обирають МК в
проєктованій системі (термінали, вимикачі, реле, клавіші, датчики, цифрові
пристрої візуальної індикації, аналого-цифрові й цифро-аналогові перетворювачі, модулятори тощо); ·
підтримувані способи завантаження програм у мікроконтролер, можливість
внутрішньосистемного програмування (ISP), використання при цьому стандартизованих інтерфейсів
(SPI, I2C); ·
кількість і тип напруги живлення; · відмовостійкість
джерела живлення; · масогабаритне
та естетичні обмеження; ·
умови довкілля, необхідні для експлуатації. Вибір прикладної мови програмування (наприклад, С або Паскаль замість асемблер) може
сильно вплинути на продуктивність системи, яка потім може диктувати вибір 8-,
16- або 32-розрядної архітектури. Тактова частота або, більш точно, швидкість шини визначає, скільки
обчислень може бути виконана за одиницю часу. Деякі мікроконтролери мають
вузький діапазон можливої тактової частоти, в той час як інші можуть
працювати аж до нульової частоти. Іноді вибирається спеціальна тактова
частота, щоб згенерувати іншу тактову частоту потрібну в системі. В основному,
обчислювальна потужність, споживана потужність і вартість системи
збільшуються з підвищенням тактової частоти. Ціна системи під час підвищення
частоти збільшується з-за вартості не тільки мікроконтролера, але також і
всіх потрібних додаткових мікросхем, таких як ROM, RAM, PLD та контролери шини.
Під час вибору МК важливо також взяти
до уваги технологію, з використанням якої виготовлено процесор МК: N-канальний
метал-оксид-напівпровідник (NMOS) у порівнянні з комплементарних MOS високого
ступеня інтеграції (HCMOS). На відміну від ранніх NMOS - процесорів, в HCMOS сигнали змінюються від 0 до значення напруги живлення.
Так як ця обставина може значно впливати на рівень перешкод у схемі, звичайно
віддається перевага процесорам HCMOS. Крім того, HCMOS споживає меншу потужність і, таким чином, менше
нагріваються. Геометричні розміри HCMOS менші, що дозволяє мати більш щільні схеми і, таким
чином, працювати за більш високих швидкостей. Більш щільний дизайн також
зменшує вартість, так як на кремнієвій пластині того ж розміру можна зробити
більшу кількість чіпів. З цих причин більшість мікроконтролерів сьогодні
виробляються з використанням HCMOS-технології. Щоб досягти більш
високого рівня інтеграції та надійності за більш низької ціни, всі
мікроконтролери мають вбудовані додаткові пристрої. Ці пристрої під
керуванням мікропроцесорного ядра мікроконтролера виконують певні функції (рис. 1.4.10). Вбудовані пристрої підвищують надійність, тому що вони
не вимагають ніяких зовнішніх електричних ланцюгів. Вони попередньо
тестуються виробником і звільняють місце на платі, тому що всі електричні
з'єднувальні ланцюга виконані на кристалі в мікроконтролерів.
Деякими з
найпопулярніших внутрісхемних пристроїв є пристрої пам'яті, таймери (рис. 1.4.11),
системний годинник, генератор і порти вводу–виводу (I /O). Пристрої пам'яті включають оперативну пам'ять (RAM), постійні запам'ятовуючі пристрої (ROM), перепрограмуємо ROM (EPROM), електрично
перепрограмуємо ROM (EEPROM) і електрично
стираємо пам'ять (EEM).
До пристроїв введення-виведення відносять послідовні порти зв'язку, паралельні порти (I /O лінії), аналого-цифрові перетворювачі (A /D), цифро-аналогові перетворювачі (D /A), драйвери рідкокристалічного екрана (LCD) (рис. 1.4.12) і
драйвери вакуумного флуоресцентного екрана (VFD).
Іншими, рідше використовуються,
вбудованими ресурсами є внутрішня і зовнішня шина, таймер стеження за нормальним
функціонуванням системи (COP), охорона схема, система виявлення відмов
тактового генератора, конфігурація пам'яті, що вибирається, та системний
інтеграційний модуль (SIM). SIM звичайно замінює зовнішню логіку, необхідну
для взаємодії із зовнішніми пристроями через обрані контакти мікросхеми.
Для відлагодження програм
використовуються програмні симулятори (спеціальні програми для персональних комп'ютерів, що імітують роботу
мікроконтролера), внутрішньосхемні емулятори (електронні пристрої, що
імітують мікроконтролер, які можна підключити замість нього до вбудованого
пристрою, що розробляється) та інтерфейс JTAG. Мікроконтролер
SIMATIC S7-200 призначений для вирішення завдань управління і регулювання в невеликих
системах автоматизації (рис. 1.4.13).
При цьому, SIMATIC S7-200
дозволяють створювати як автономні системи управління, так і системи
управління, що працюють у загальній інформаційній мережі. Область
застосування контролерів SIMATIC S7-200 виключно широка і простягається від найпростіших
завдань автоматизації, для вирішення яких в минулому використовувалися прості
реле і контактори, до завдань комплексної автоматизації. SIMATIC S7-200
все більш інтенсивно використовується під час створення таких систем
управління, для яких в минулому з міркувань економії необхідно було
розробляти спеціальні електронні модулі. • складського господарства; • конвеєрних; • елеваторівя; • транспортування
матеріалів; • пакувальних
машиня; • змішувальних
установок; • опріснювальних
установок; • в установках із
очищення стічних вод; • зовнішніх
дисплеїв; • станцій
розподілу електроенергії; • регулювання
температури в приміщеннях; • нагрівальних та
охолоджувальних установок; • протипожежних
системах; • встановлення
кондиціонування повітря; • освітлювальних
установок; • насосних
станцій. CPU 221 – малогабаритний центральний процесор володіє досить високою
потужністю. Вбудовані дискретні входи на вибір можуть працювати як швидкі
32-розрядні лічильники (чотири лічильники), лінії переривання (чотири лінії),
або як звичайні дискретні входи. CPU 221 не має можливості розширення. CPU 222 – модель, яка завдяки великому обсягу пам'яті і численним
інтегрованим спеціальним функціям дозволяє з успіхом вирішувати досить
складні завдання автоматизації. CPU 222 має можливість нарощування через шину розширення
(до 2 зовнішніх модулів). CPU 224/226 – ці моделі володіють найкращими характеристиками в сімействі
під час управління процесами в реальному масштабі часу. 6 швидких
лічильників. CPU 224/226 мають можливість нарощування через шину розширення (до 7
зовнішніх модулів). CPU 224 XP –
остання модель з сімейства S7-200. Вона включає в себе всю функціональність CPU 224 і має додатково 2 аналогових входи і один вихід,
для роботи з аналоговими сигналами без додаткових модулів розширення. Для CPU 224 XP також є нарощування через шину розширення (до 7
зовнішніх модулів). Всі CPU серії S7-22x мають
вбудований PPI
інтерфейс (від точки до точки) використовується для з'єднання з программаторами
(PG), ПК, дисплеями TD200, TP070 та іншими панелями оператора. Інтерфейс PPI має швидкість передачі до 187.5 Кбіт / с і може
використовуватися для підключення S7-200 в якості веденого MPI пристрої (провідні пристрої: S7-300 / 400, панелі оператора, текстові дисплеї,
кнопкові панелі). Інтерфейс PPI може використовуватися для підключення модемів,
пристроїв зчитування бар-кодів, принтерів або для організації невеликих мереж
з контролерів, панелей оператора та ін. Всі CPU 22x здатні виконувати операції над числами з плаваючою комою і підтримують
алгоритм ПІД – регулювання.
Для функціонування комп’ютерних мереж необхідно забезпечити
надійне і швидке передавання даних лініями зв’язку. Лінії (канали) зв’язку забезпечують передавання і поширення сигналів від
передавача до приймача.
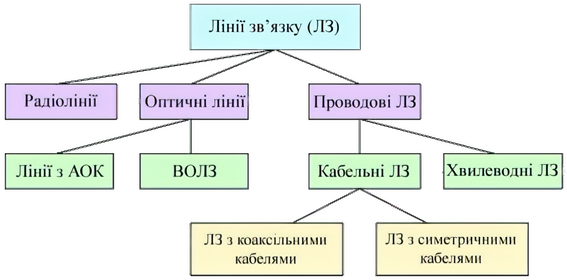
Лінії зв’язку можуть бути провідні і безпровідні (радіозв’язок). У свою
чергу дротовий зв’язок може реалізовуватися електричним кабелем та
оптоволоконною лінією (рис. 1.4.14).
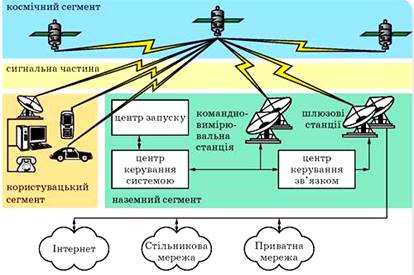
Радіозв’язок здійснюється супутниковими каналами із застосуванням космічних
ретрансляторів, радіорелейними лініями із застосуванням наземних
ретрансляторів і засобами стільникового зв’язку з використанням мережі
наземних базових станцій.
Зважаючи на середовище поширення
сигналів, лінії зв’язку можна поділити на три групи: радіолінії, проводові й
оптичні. У радіолініях сигнали передаються у вільному просторі, в проводових
лініях – металевими кабелями, хвилеводами, в оптичних лініях – волоконними
світловодами або у вільному просторі. Класифікацію цих ЛЗ наведено на рис.
1.4.14.
·
висока швидкість передавання інформації на відстань понад 100 км без
ретрансляторів; ·
захищеність інформації, що передається; ·
висока стійкість до електромагнітних завад; ·
стійкість до агресивних середовищ; ·
можливість передавати одним волокном одночасно до 10 мільйонів телефонних
розмов і одного мільйона відеосигналів; ·
гнучкість волокон; ·
малі розміри і маса; ·
іскро-, вибухо- та пожежобезпечність; ·
простота монтажу й укладання; ·
низька собівартість; ·
висока довговічність оптичних волокон – до 25 років. Бездротові системи зв’язку реалізуються радіоканалами (рис. 1.4.16).
Ідея мобільного стільникового зв’язку полягала ще й у застосуванні комп’ютерного
контролю за телефонним сигналом від абонента, коли він переходить від одного
стільникового осередку до іншого. Саме комп’ютерний контроль дозволив
упродовж тисячної частки секунди перемикати мобільний телефон з одного
проміжного передавача на інший. Коли абонент переміщається з однієї комірки
до іншої, комп’ютери передають абонента з однієї базової станції до іншої, а
також підключають абонента з «чужої» мережі до «своєї», коли він опиняється в
зоні її дії, – здійснюють роумінг – перевага мобільного стільникового
зв’язку – можливість користуватися зв’язком поза спільною зоною свого
оператора. Таким чином, стільниковий зв’язок забезпечує користувачу
можливість зв’язуватися телефоном із будь-якою країною, де б він не
знаходився. Нині поширення набувають смартфони і комунікатори, які поєднують
можливості стільникового телефону і кишенькового комп’ютера. · амплітудно-частотна характеристика; · смуга пропущення; · загасання; · перешкодостійкість; ·
перехресні наведення на ближньому кінці лінії; · пропускна здатність; · вірогідність передачі даних; · питома вартість. У першу чергу
розроблювача обчислювальної мережі цікавлять пропускна здатність і
вірогідність передачі даних, оскільки ці характеристики прямо впливають на
продуктивність і надійність створюваної мережі. Пропускна
здатність і вірогідність – це характеристики як лінії зв'язку, так і
способу передачі даних. Тому, якщо спосіб передачі (протокол) уже визначений,
те відомі і ці характеристики. Наприклад, пропускна здатність цифрової лінії
завжди відома, тому що на ній визначений протокол фізичного рівня, що задає
бітову швидкість передачі даних – 64 Кбіт/с, 2 Мбіт/с. Але не можна говорити
про пропускну здатність лінії зв'язку, до того як для неї визначений протокол
фізичного рівня. Саме в таких випадках, коли тільки має бути визначити, який
з безлічі існуючих протоколів можна використовувати на даній лінії, дуже
важливими є інші характеристики лінії, такі як смуга пропущення, перехресні
наведення, перешкодостійкість і ін. Для визначення характеристик лінії зв'язку часто використовують аналіз її
реакцій на деякі еталонні впливи. Такий підхід дозволяє досить просто
визначати характеристики ліній зв'язку будь-якої природи, не прибігаючи до
складних теоретичних досліджень. Найчастіше як еталонні сигнали для
дослідження реакцій ліній зв'язку використовуються синусоїдальні сигнали
різних частот. Це зв'язано з тим, що сигнали цього типу часто зустрічаються в
техніці і за їх допомогою можна представити будь-як функцію часу – як
безупинний процес коливань звуку, так і прямокутні імпульси, які генеруються
комп'ютером. Об'єднання окремих підсистем (пристроїв, модулів) ЕОМ в
єдину систему за допомогою ліній зв’язку ґрунтується на багаторівневому
принципі з уніфікованим сполученням між усіма рівнями – стандартним інтерфейсом.
· пропускною спроможністю інтерфейсу – кількістю
інформації, яка може бути передана через інтерфейс в одиницю часу; · максимальною частотою передачі інформаційних сигналів
через інтерфейс; · інформаційною шириною інтерфейсу – числом біт або байт
даних, що передаються паралельно через інтерфейс; · максимально допустимою відстанню між з’єднувальними
пристроями; · динамічними параметрами інтерфейсу – часом передачі
окремого слова або блоку даних з урахуванням тривалості процедур підготовки
та завершення передачі; · загальним числом проводів (ліній) в інтерфейсі.
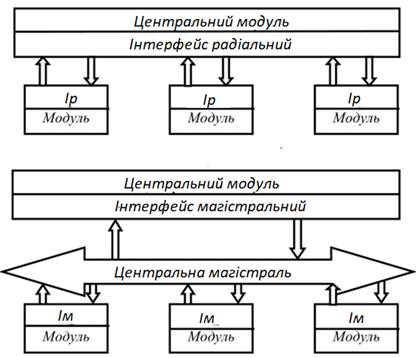
· спосіб з'єднання компонентів системи (радіальний,
магістральний, змішаний); · спосіб передачі інформації (паралельний, послідовний,
паралельно-послідовний); · принцип обміну інформацією (асинхронний, синхронний); · режим передачі інформації (двостороння почергова
передача, одностороння передача).
Радіальний
інтерфейс дозволяє всім модулям працювати незалежно, але має максимальну
кількість шин (рис. 1.4.17). Магістральний
інтерфейс (загальна шина) використовує принцип поділу часу для зв'язку між ЦМ
і іншими модулями. Він порівняно простий у реалізації, але лімітує швидкість
обміну. Паралельні
інтерфейси дозволяють передавати одночасно визначену кількість біт або байт
інформації по багатопровідній лінії. Послідовні інтерфейси використовуються
для послідовної передачі по двопровідній лінії. У разі синхронного
інтерфейсу моменти видачі інформації передавальним пристроєм і прийому її в
іншому пристрої мають синхронізуватися, для цього використовують спеціальну
лінію синхронізації. Під час асинхронного інтерфейсу передача здійснюється за
принципом «запит–відповідь». Кожен цикл передачі супроводжується
послідовністю керуючих сигналів, які виробляються передавачем і прийомними
пристроями. Передавальний пристрій може здійснювати передачу даних (байти або
декількох байтів) тільки після підтвердження приймачем свою готовність до прийому
даних. · машинні
системні інтерфейси; · локальні
шини; · інтерфейси периферійних пристроїв (малі інтерфейси); · міжмашині
інтерфейси. Машинні (всерединімашинні) системні
інтерфейси призначені для організації зв'язків між складовими компонентами
ЕОМ на рівні обміну інформацією з центральним процесором, ОП і контролерами
(адаптерами) ПУ.
Локальною шиною
називається шина, безпосередньо електрично під’єднана на контакти мікропроцесора, і призначена
для збільшення швидкодії відеоадаптерів і контролерів дискових накопичувачів (рис. 1.4.18). Вона зазвичай об'єднує процесор,
пам'ять, схеми буферизації для системної шини і її контролер, а також деякі
допоміжні схеми. Типовими прикладами локальних шин є VLB і PCI. Призначення
інтерфейсів периферійних пристроїв (малих інтерфейсів) полягає у виконанні
функцій сполучення контролера (адаптера) з конкретним механізмом ПУ. Міжмашинні
інтерфейси використовуються в обчислювальних системах і мережах. З метою зниження вартості
деякі комп'ютери мають єдину шину (загальна шина) для пам'яті і пристроїв
введення–виведення. Персональні комп'ютери перших поколінь, як правило,
будувалися на основі однієї системної шини в стандартах ISA, EISA або МСА. Необхідність збереження балансу
продуктивності у міру зростання швидкодії мікропроцесорів призвела до
багаторівневої організації шин на основі використання декількох системних і
локальних шин. У сучасних комп'ютерах шини інтерфейсів ділять на шини, що
забезпечують організацію зв'язку процесора з пам'яттю, і шини
введення-виведення. Шини процесор-пам'ять порівняно короткі, зазвичай
високошвидкісні і відповідають організації підсистеми пам'яті для
забезпечення максимальної пропускної здатності каналу пам'ять-процесор. Шина
введення–виведення комп'ютера розглядається як шина розширення; забезпечує
поступове нарощування пристроїв введення–виведення. Тому стандарти відіграють
значну роль, дозволяючи розробникам комп'ютерів і пристроїв
введення-виведення працювати незалежно. Розглянемо основні
шини розширення, які забезпечують зв'язок комп’ютера з периферійними
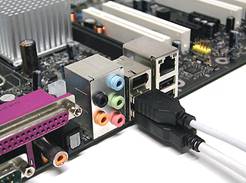
пристроями. USB (Universal Serial Bus) – використовується для підключення зовнішніх
периферійних пристроїв, а в точності для: миші, клавіатури, цифрової камери,
портативних жорстких дисків, принтерів, сканерів, webкамер, та інших пристроїв (рис.
1.4.19).
Швидкість передачі
для стандарту: 12 Мбіт / с (USB 1.1) Швидкість передачі
для Hi-Speed: 480 Мбіт / с (USB 2.0) Роз'єми в даних
стандартах – однакові. Різниця становить собою тільки швидкість передачі і в
наборі функцій. USB постачає пристрої живленням, в зв'язку з цим пристрої функціонують від
інтерфейсу без додаткового живлення (500 мА на 5 В).
У роз'ємів,
призначених для мобільних пристроїв модифікації найбільш помітні. Старий
роз'єм Micro-B USB 2.0 був шириною 6,86 мм, проте нині ширина роз'єму USB 3.0 Micro-B для
мобільних плеєрів, МР4 (mp3), мобільних телефонів і смартфонів підвищилася до
12,25 мм. Роз'єми розроблені таким чином, щоб бути сумісним із USB 2.0. Кабель FireWire з 6-контактною виделкою
Офіційна назва IEEE-1394 – це послідовний інтерфейс (рис. 1.4.22), що застосовується для роботи з
цифровими відеокамерами, зовнішніми жорсткими дисками і різними мережевими
пристроями. «Тюльпан» (Cinch / RCA): композитний відео, HDTV, аудіо Вилки «Тюльпана»,
для більш простого користування розробники зробили кожен роз'єм особливого
кольору (рис. 1.4.24).
Білий або чорний –
звук, лівий канал Червоний – звук,
правий канал (також див. HDTV) Жовтий – відео,
композитний Зелений –
компонентний HDTV (яскравість Y) Синій –
компонентний HDTV Cb/Pb Chroma Червоний –
компонентний HDTV Cr/Pr Chroma Помаранчевий/жовтий
– звук SPDIF Інтерфейс PS/2
Використовується
він для під’єднання миші та клавіатури (рис.
1.4.25) Зелений: миша Фіолетовий: клавіатура Інтерфейс VGA
Використовується
для підключення монітора (рис. 1.4.26). Інтерфейс DVI
DVI – це інтерфейс монітора, спеціально розробленим, для цифрових сигналів (рис. 1.4.27). Графічна карта з
двома портами DVI дає можливість посилати цифрові сигнали відразу на два монітори.
за
виконанням: ·
на відкриті (панелі) ·
захищені (шафні); за
призначенням: • на оперативні, в яких ведеться контроль і
керування технологічним процесом; • неоперативні, призначені для установки апаратів
і приладів, які не використовуються безпосередньо оператором; • для керування і спостерігання за ходом
технологічного процесу.
•
місцеві – розташовані поблизу установки; • агрегатні, на яких встановлюється апаратура керування
контролю і сигналізації для одного агрегату; • блочні – включають в себе засоби автоматизації
декількох агрегатів; • центральні, в яких розташовують апаратуру керування і автоматизації,
яка відноситься до всього технологічного процесу цеху (корівник, свинарник,
кормоцех тощо). Згідно з нормативними документами необхідно
позначати відповідно до ОСТ 36.13-76 (табл. 1.16). Таблиця 1.16 Позначення щитів і пультів
Шафні щити
застосовують у виробничих приміщеннях з підвищеним вмістом пилу, з
великою пологістю, якщо не виключена можливість пошкодження апаратури
і проводки, яка розміщена в щиті, якщо всередині щита необхідно розмістити
допоміжну апаратуру (реле, джерела живлення, сигналізацію) для
захисту обслуговуючого персоналу від дотику до струмоведучих частин
апаратів, затискачів. Панельні щити з
каркасом встановлюють у спеціальних приміщеннях, які для цього призначені (диспетчерські,
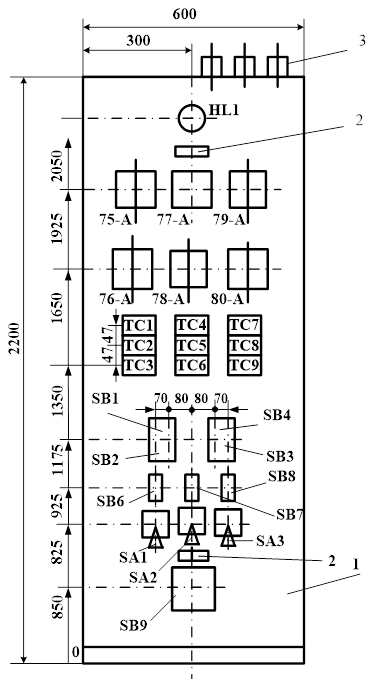
операторські пункти керування). Креслення загального виду повинно мати вид спереду (фронтальна площина), де
спрощено показано прилади і апарати з необхідною координацією, щоб
підготувати місце на фронтальній площині під прилади. Координація здійснюється
за рахунок прив'язки апаратури до основи щита і осьової лінії (рис. 1.4.29).
Біля зображень приладів
показують її буквено-цифрове позначення за принциповими схемами.
Для пояснення призначення приладу або апарата під приладом, або апаратом встановлюють
рамку з надписом (вид спереду, двері закриті) показують без координації
апаратів. У кресленнях загальних видів наведено також перелік елементів. У кресленнях
загальних видів наводиться також перелік елементів. У переліку зазначають:
позиції приладів і засобів автоматизації (табл. 1.17). Таблиця. 1.17 Перелік елементів
Ввід у щит електричних трубних проводок
передбачається, як правило, знизу або
зверху і як виключення – збоку. Для зручності монтажу
і експлуатації за інших рівнозначних умов перевага має надаватись вводу проводок знизу щита
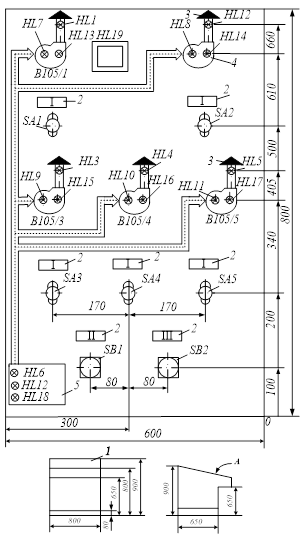
або пульта. Для більш наочної
інформації протікання технологічного процесу, окремих операцій можуть
застосовуватись мнемосхеми, які встановлюють у диспетчерських
пунктах. Мнемосхема дозволяє оператору швидко оцінювати ситуацію і хід
технологічного процесу. На мнемосхемі відображаються всі основні
контури об'єктів керування, але ступінь деталізації не має
бути надто великою. На мнемосхемах не показують другорядні елементи
технологічного процесу, які відвертають увагу оператора і
ускладнюють оцінку стану протікання процесу. Окремі технологічні
машини, апарати, трубопроводи, лінії зв'язку на мнемосхемах зображають
символами. Контури символів, як правило, мають бути подібними
контурам відповідних машин і апаратів. Зберігати масштаб при цьому
необов'язково і навіть недоцільно. Як приклад на
рис.1.4.30 наведено мнемосхему пульта керування насосними агрегатами станції
зрошування. Більшість приладів і засобів автоматизації мають
розміщуватись у щитах або пультах, це означає, що розміри щитів і пультів
залежать від розмірів технічних засобів. Розглянемо деякі положення, якими необхідно
керуватись під час визначення розмірів щитів (рис. 1.4.30).
Рис. 1.4.30. Загальний вигляд пульта з мнемосхемою
Щити з дверима, у яких глибина, тобто
відстань від дверей до протилежної стінки не перевищує На внутрішніх стінках рекомендується
встановлювати тільки збірки затискачів. Під час розміщення приладів і апаратів у щитах і
пультах відстань між відкритими струмоведучими елементами різних фаз, а
також між елементами і неізольованими металевими частинами має бути не менше
·
трансформатори і інші джерела живлення малої
потужності на відстані 1700– ·
панелі з вимикачами, запобіжниками, автоматами на
відстані 700– ·
реле
на відстані 600– ·
збірки затискачів за вертикального розташування з
урахуванням підключення
знизу: нижній край збірки – ·
збірки затискачів за горизонтального
розташування – 350– ·
відстань між збірками затискачів – ·
відстань від приладу до стінки щита – · відстань між
приладами по горизонталі – Апарати, які виділяють під час роботи значну
кількість тепла (резистори, лампи розжарювання) необхідно розташовувати у
верхній частині щита. Апарати з рухомими частинами (рубильники,
магнітні пускачі, реле) необхідно розташовувати так, щоб вони під дією
сили тяжіння не могли самостійно замкнути коло. Електричні проводки в
щитах і пультах виконують відкритими, об'єднуючи їх у джгути. Не
дозволяється з'єднувати в загальні джгути проводки кіл живлення, керування і сигналізації з
вимірювальними колами приладів. Загальна прокладка кіл різного призначення призводить до того, що
в колах вимірювальних приладів виникають
електричні перешкоди, які значною мірою спотворюють результати вимірів. Вимірювальні кола прокладають окремо.
Монтаж проводок всередині щитів виконують проводом з мідними жилами марки ПВ, а монтаж проводок до приладів, які
встановлені на рухомих елементах (двері, поворотні рамки) – гнучкими
проводами марки ПГВ. Сучасна світова практика
вказує на стійку тенденцію до впровадження віртуальних вимірних засобів для
проведення досліджень реальних процесів. Зокрема, в американських та
французьких університетських навчально-наукових лабораторіях знайшли широке
застосування віртуальні пристрої фірми «National Instruments». Проведений аналіз стану і тенденцій проєктування
віртуальних інструментів показав наявність двох основних принципів побудови.
Перший – реалізує концепцію вбудови мікроконтролера в корпус приладу і
другий, більш перспективний – з’єднання персонального комп’ютера з платою
збирання даних.
Концепція
віртуальних пристроїв полягає у синтезі вимірювальних приладів, стандартних
пристроїв узгодження і персонального комп’ютера з гнучким програмним
забезпеченням. Причому віртуальність
таких пристроїв полягає в тому, що вони не є постійними промисловими виробами
та конструктивно завершеними, а тимчасовими для проведення конкретних
електрофізичних дослідів. Проєктування нового віртуального інструменту
розпочинається зі створення діалогового вікна командою New-Blank BI. У загальному для створення віртуальних інструментів у
середовищі LabWIEW
використовується: фронтальна панель, блок-діаграма і 3 палітри (елементів
курування та відображення інформації, функцій та інструментальна). На першому етапі проєктно-віртуальної діяльності визначаються зовнішні
щодо даної системи цілі досягнення бажаного результату. Зокрема, створюється
загальне уявлення про результат проєктування і оформлюється у вигляді
користувацького інтерфейсу на лицьовій панелі. Такий інтерфейс представлений елементами
вводу–виводу даних: цифровими контролами, реостатами, індикаторами,
осцилографами та елементами дизайну. Другий етап є найбільш важливим і полягає у моделюванні віртуальних інструментів на
блок-діаграмі. Зокрема, після проєктування інтерфейсу користувача, переходять
до розробки основного коду програми, який доповнений додатковими елементами
палітри Function.
Зокрема, віртуальними циклами, масивами, кластерами, генераторами симуляції
сигналів (Sine Pattern) тощо. При цьому
представлення інформації можна здійснити наочно у вигляді масивів у табличній
чи графічній формах. Найзручнішою є наочна інтерпретація експериментальних
даних у файл типу «крупноформатна таблиця», а також за допомогою осцилографів
Waveform. Після розробки
блок-діаграми переходять до налагодження роботи віртуальної схеми у
середовищі LabWIEW. Для
цього підійде інструмент «Highlight Execution», що вмикає режим анімації потоку даних і режимами
покрокового налагодження та редагування програми. Специфіка даного IDE полягає у можливості роботи в режимі «підказки».
Тобто, програма керує діями програміста, надаючи коментарі і блокується під
час здійснення недопустимих помилок. Проєктування
завершували конструкторським етапом, який передбачав конфігурацію спеціальних
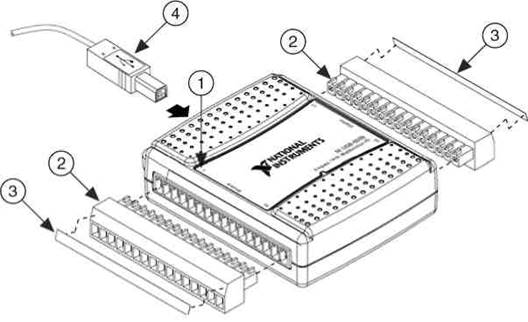
пристроїв збирання даних (DAQ) та під’єднання вхідних і вихідних елементів (рис.
1.4.31).
Рис. 1.4.31. Загальний вигляд
плати вводу-виводу типу USB 6008: 1 – напис на кришці; 2 – роз’єм
для блоків клем; 3 – наклейки, що ідентифікують
сигнали; 4 – USB-кабель Проєктування
віртуальних пристроїв може бути використано для вирішення таких завдань
автоматизації та вимірювання: регулювання рівня води у водонапірній вежі;
реверсивний пуск асинхронного електродвигуна; частотне регулювання
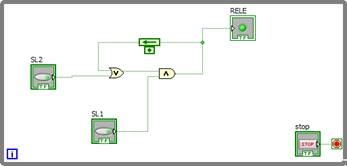
електропри-воду; таймери; ШІМ-контролери тощо. Приклад
регулювання рівня води у водонапірній вежі у середовищі LabWIEW (рис. 1.4.32, рис. 1.4.33).
·
зниженням матеріальних витрат унаслідок застосування лише віртуальних
інструментів; ·
більшою точністю проведення експериментальних досліджень; ·
багатофункціональністю вимірних пристроїв для реалізації різнорідних
технічних завдань; ·
підвищенням показників надійності системи автоматичного управління та
вимірювання внаслідок зменшення аварійних режимів роботи; ·
підвищенням наочності збирання, обробки та відображення інформації в
табличній і графічній формах; ·
доступного налагодження роботи віртуальних пристроїв за рахунок
покрокового режиму й анімації потоків даних по програмних провідниках; • вирішенням екологічних проблем. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||