|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3. НЕУСТАЛЕНИЙ РУХ ЛІТАЛЬНИХ АПАРАТІВ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
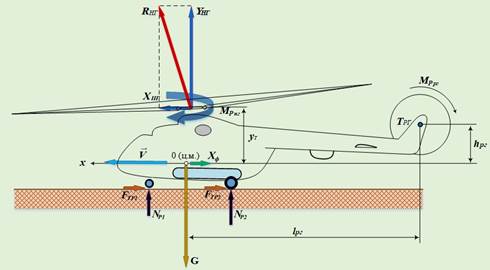
Рух вертольота по землі в процесі руління, розбігу під час
зльоту та пробігу під час посадки має низку істотних особливостей, як
порівняти з польотом у повітрі, які пілот має враховувати. Зокрема, крім
аеродинамічних сил і сили тяжіння (а на землі – сили ваги), на вертоліт діють ще сили реакції землі (Npeaк) (нормальні) і сили тертя коліс (Fтр,) (тангенціальні), які наведено на рис.
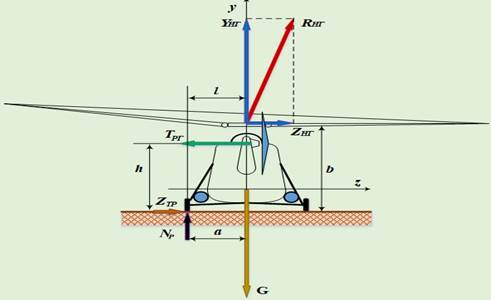
3.2.1, можливі й бічні сили тертя (Zтр)
(рис. 3.2.2). Рух по землі може бути
сталим і несталим. Хоча вертоліт, що рухається по землі, не має свободи
обертання відносно поздовжньої і поперечної осей, проте, через високе
розташування центру тяжіння і несиметричне розташування аеродинамічних сил за
певних умов можливі поворот вертольота щодо цих осей і навіть перекидання.
Тому під час руління, розбігу і пробігу важливо витримувати рівновагу поперечних
сил і моментів. За прямолінійного руху реактивний момент (МPНГ) має бути
урівноважений моментом від тяги РГ (ТРГ * lрг). Крім того,
щоб не було крену і рівномірно розподілялося навантаження на колеса і
амортизаційні стійки шасі (в поперечному
напрямку), має виконуватися рівність ZНГ * уТ = ТРГ *
hРГ. З останньої умови рівноваги моментів бачимо,
що за різної довжини плечей yТі
і hрв. порушується
рівність бічних сил ZНГ
і ТРГ і
з’являється бічна сила реакції (ZTP). Пілот під час руління (розбігу або пробігу) не може цілком
проконтролювати виконання всіх перерахованих умов рівноваги. Особливо важко
контролювати рівність бічних сил і моментів. Тому основне, на що пілот має
постійно звертати увагу під час руління, – це не допустити юзу і крену
вертольота, особливо під час руління по м’якому ґрунту. На рис. 3.2.2
наведено схему сил за відриву вертольотом переднього і основного правого
коліс. У цьому випадку має місце перекидний момент ліворуч Тенденція вертольота по крену в той чи інший бік зросте в
разі бічного вітру, порушення шорсткості шасі (слабкої зарядки амортизатора), збільшення переднього (хТ) і зменшення
вертикального центрування (уТ),
нахилу (ухилу) майданчика, а також великої
величини швидкості рулювання і особливо швидкості розвороту. У зв’язку з цим у Керівництві з льотної експлуатації
передбачено певні обмеження за швидкістю вітру, рулінням, розбігом і
пробігом, нахилом майданчиків, величиною загального кроку НГ під час
руління та інші. Під час руху вертольота по землі може виникнути особливе
явище, що має назву земного резонансу.
Під земним резонансом розуміють самозбуджувальні
коливання вертольота на шасі зі зростаючою амплітудою під час руління, зльоту
та посадки. Це явище небезпечне, тому що нерідко воно призводило до
перекидання і поломки вертольотів. Земний резонанс може виникнути на
вертольотах із м’яким шасі, у яких лопаті НГ мають вертикальні
шарніри. Натепер під час конструювання прагнуть цілком виключити ймовірність
потрапляння вертольота в земний резонанс раціональним підбором
характеристик демпферів вертикальних шарнірів лопатей, амортизацією шасі,
спеціальними гасителями коливань тощо.
Однак земний резонанс все ж може виникнути в процесі
експлуатації за деяких несправностей вертольота і за неправильного його
технічного обслуговування. Тому для пілота важливо знати природу цього явища,
особливості поведінки вертольота і необхідні дії у разі випадкового
потрапляння в земний резонанс. Природа резонансних коливань полягає в
певному поєднанні (складанні) одних коливань з іншими.
Коли частоти таких коливань збігаються, виникає резонанс, зростає амплітуда
коливань. Зокрема, земний резонанс виникає як результат додавання
коливань обертових лопатей НГ у площині обертання відносно
вертикальних шарнірів і власних коливань вертольота на шасі. Коливання лопатей у площині обертання НГ виникають унаслідок порушення
геометричної (і масової) симетрії розташування
лопатей щодо центру обертання. Наприклад, розбіжність загального центру мас
лопатей із центром обертання може статися за стоянки і непрацюючих двигунів,
коли лопаті під дією своєї маси «збігаються» вздовж нахиленої площини в
бік відхилення осі НГ. Аналогічна картина спостерігається під час
руління в разі швидкого відхилення вала НГ щодо обертових лопатей
через наїзд на купину або потрапляння одного з коліс у яму. Як результат
такої розбіжності центру мас лопатей НГ з центром їх обертання виникає
змінна неврівноважена відцентрова сила, яка і призводить до розгойдування
вертольота. У вертольота, розташованого на пружному шасі, ці коливання
можуть гаситися, залишатися незмінними або збільшуватися (земний резонанс). За розкручування НГ під час запуску двигуна майже на
всіх вертольотах спостерігається характерне розгойдування. У міру зростання
обертів НГ зменшується амплітуда і збільшується частота цих коливань.
Однак коливання вертольота за розкручування НГ можуть перерости в земний
резонанс у разі певних відмов амортизації шасі, демпферів тощо. Земний
резонанс під час руління й розбігу (пробігу) має велику частоту і можливий тільки за певних
швидкостей руху вертольота по землі, що для деяких вертольотів є однією з
основних причин обмеження швидкості руління. Джерелом енергії для коливань вертольота є обертовий НГ,
а саме, що підводить до нього потужність. Виникнення земного резонансу
визначається за збільшенням амплітуди коливань. Спочатку вертоліт
розгойдується без відриву коліс від ґрунту, потім розгойдування дуже швидко
досягає такої величини, що вертоліт ударяється поперемінно то одним, то іншим
колесом. Увесь процес таких коливань може тривати не більше ніж 6–7 с до небезпечного
крену, коли лопаті НГ можуть торкнутися землі. Тому дії пілота мають
бути дуже швидкими і своєчасними. Для запобігання потраплянню в земний резонанс
необхідно насамперед чітко виконувати всі вказівки інструкції з
експлуатації цього вертольота. Крім того, від пілота потрібне дотримання
певних заходів під час запуску й руління, а також зльоту та посадки.
У разі потрапляння вертольота в земний резонанс слід
швидко повернути ручку керування в нейтральне положення, скинути важіль «крок-газ» донизу, вивести корекцію
ліворуч до відмови і зупинити вертоліт. Якщо коливання не припиняються,
вимкнути двигуни і швидко загальмувати НГ. Для деяких вертольотів за виникнення земного резонансу
на швидкостях більше ніж 30–40
км/год у процесі розбігу можна рекомендувати відхід від землі тільки
в разі, якщо гальмування на землі більш небезпечно. Не можна у разі
виникнення земного резонансу намагатися парирувати коливання вертольота
відхиленнями ручки керування. Такі дії, зазвичай, причин не усувають, а
навпаки, сприяють їх зростанню, тому що пілот ненавмисно запізнюється зі
своєчасним їх відхиленням і потрапляє в резонанс із відхиленнями вертольота.
З огляду на наведені вище особливості та експлуатаційні
обмеження, рух вертольота по землі доцільно здійснювати тільки підготовленими
(знайомими) майданчиками, рульовою
доріжкою. У всіх інших випадках краще виконати підліт. Найбільш відповідальний момент початку руління – зрушення.
У цей момент мають бути плавними рухи важелями керування, особливо якщо
вертоліт тривалий час стояв на м’якому і в’язкому ґрунті або пухкому снігу.
Тому для зрушення, щоб подолати опір тертя та інерцію вертольота, необхідно
ввести корекцію, плавно збільшити загальний крок НГ (у допустимих межах) і відхилити ручку керування
трохи від себе. Як тільки вертоліт почне рух вперед, плавно зменшити
загальний крок НГ до рекомендованої величини. На одногвинтових
вертольотах не слід для зрушення відхиляти ручку керування від себе до упору
і «допомагати» знакозмінними відхиленнями
педалей, тому що при цьому збільшується вібрація вертольота (удари лопатей по упорах) і відбувається додаткове
навантаження передньої стійки. Колесо, ще більш заглибившись у ґрунт,
перешкоджає зрушенню, а зміна тяги РГ розгойдує вертоліт і сприяє його
перекиданню. Іноді зрушенню заважає переднє колесо, розвернуте під 900 ліворуч, або
загальмовані основні колеса. У такому випадку одногвинтовий вертоліт у
процесі зрушення прагне розвернутися ліворуч. Деякі пілоти, прагнучи вирулити чітко прямо, припускаються
помилки – відхиляють уперед до упору праву педаль, перешкоджаючи розвороту
ліворуч. Наприклад, на вертольоті Мі-8
за загального кроку НГ φ
= 40 і відданої уперед ручки керування створюється значний
перекидний момент щодо осі, що з’єднує розвернуте ліворуч переднє колесо й
основне ліве колесо. Вертоліт замість рушання починає кренитися ліворуч –
уперед. Такий рух вертольота пілотом сприймає як незвичний. У цій ситуації
треба плавно зменшити загальний крок НГ і з’ясувати причину, що
перешкоджає вирулюванню. На рулінні необхідно витримувати швидкість. Особливо
важливо стежити за швидкістю на розворотах за наявності бічного вітру, щоб
зменшити ймовірність перекидання. Напрямок під час руління слід зберігати
плавним відхиленням педалей. За наявності бічного вітру ручка керування
відхиляється в бік вітру. За появи крену в той чи інший бік необхідно відразу ж
парирувати його ручкою керування, водночас доцільно відхилити вперед педаль у
бік крену (крен лівий – уперед ліву педаль) і зменшити загальний крок НГ. Такі заходи,
зазвичай, запобігають подальшому крену й перекиданню. Це особливо важливо
враховувати на одногвинтових вертольотах у разі розворотів праворуч на
великій швидкості. За парирування крену не можна різко скидати загальний крок
НГ. Річ у тім, що за різкого скидання загального кроку вертоліт також
різко опускається на основне колесо і починає енергійно розгойдуватися, що
може викликати земний резонанс або перекидання у разі неправильних дій
пілота. Для зупинення або гальмування під час пробігу не можна різко
і до відмови брати ручку керування на себе. Це особливо небезпечно робити на
одногвинтових вертольотах з одночасним натисканням на важіль гальмування
коліс. Вертоліт різко зупиняється, до того ж за інерцією «киває вниз», а несучий гвинт
відхиляється назад, що за зустрічного вітру створює сприятливі умови для
удару лопатями НГ по хвостовій балці. Отже, зупиняти вертоліт треба
також плавними відхиленнями важелів керування.
Його можна порівняти з маневром, тому що всі елементи
виконують разом у певній послідовності для досягнення цілком конкретної мети.
По суті, це комплекс різних режимів. У зліт входять вертикальний підйом,
висіння, горизонтальний розгін, введення вгору і майже сталий режим набору
висоти за нахиленою траєкторією. Обов’язковою умовою для зльоту є наявність
певного надлишку тяги (потужності) на НГ. На вертольотах широко застосовують два способи зльоту: по-вертолітному
і по-літаковому.
Той чи інший спосіб зльоту обирають залежно від характеру
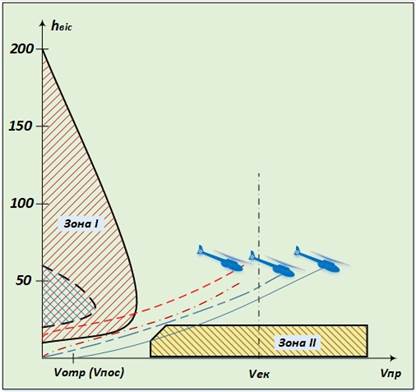
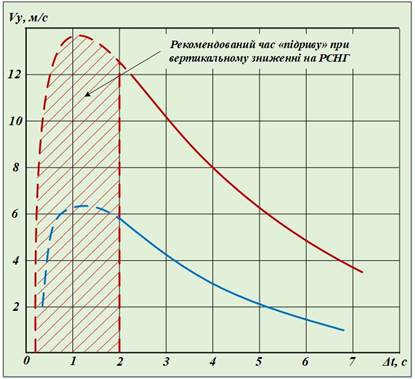
майданчиків, зовнішніх умов, завантаження вертольота і надлишку потужності. Під час виконання зльоту важливо враховувати так звані
небезпечні зони за відмови одного або обох двигунів, які наведено на рис.
3.2.3. Виконуючи зліт, необхідно намагатися за можливості уникати
входження в них. Зона I – вважається
небезпечною за відмови всіх двигунів, установлених на вертольоті, тому що в
цьому випадку не забезпечується достатньою мірою безпечна посадка, особливо
якщо пілот запізнюється зі своєчасним скиданням загального кроку НГ і
переведенням вертольота на поступальний політ. При цьому знижуються оберти НГ
і швидко наростає вертикальна швидкість зниження. Однак за своєчасних (без запізнення) і правильно виконаних дій
пілота можливе безпечне приземлення навіть за відмови двигунів у цій зоні. Зона розділена пунктирною лінією на дві частини.
Додатково заштрихована зона небезпечна навіть за відмови одного з двигунів,
якщо на вертольоті силова установка складається з декількох двигунів. Зона II – являє
певну небезпеку під час виконання розгону з великими негативними кутами
тангажу (більше ніж 200) і використанням максимальної
потужності СУ. У такому випадку за відмови двигуна (двигунів) пілот не встигає зреагувати
і вертоліт, зачепившись переднім колесом об землю, перекидається. З урахуванням цих експлуатаційних обмежень траєкторія
польоту вертольота під час зльоту за можливості має проходити з безпечного «коридору» (рис. 3.2.3). За вимушеного заходу в небезпечні зони необхідно прагнути
скоротити час перебування в них до мінімуму. Слід зауважити, що небезпека зон
значно знижується з підвищенням якості техніки пілотування пілота його
підготовленості до дій в аварійній ситуації і натренованості. Цьому сприяють
тренування на тренажерах і тренажних комплексах під час моделювання аварійних
ситуацій, що можуть статися в польоті. Під час зльоту пілоту необхідно враховувати експлуатаційні
обмеження щодо граничної маси. Обмеження швидкості зустрічного вітру враховують дві
основні причини: першу – можливість удару лопатей по хвостовій балці за
розкручування НГ під час запуску і зупинки після вимкнення двигунів, і
другу – за швидкостей вітру понад 25
м/с, зазвичай, спостерігається велика турбулентність повітря, а саме,
значні за величиною швидкості висхідні й низхідні потоки повітря поблизу
землі, а також великі зміни швидкості (пориви) вітру, і політ у таких умовах є небезпечним. Швидкість бічного вітру обмежується переважно за запасами
шляхового керування, щоб виключити потрапляння вертольота в мимовільний
розворот. Як було показано раніше, потреби віддачі педалей збільшуються за
висіння з лівим і правим вітром. Крім того, за швидкостей вітру праворуч
більше ніж 10 м/с під час
розкручування і зупинки НГ можливий удар лопатей по хвостовій балці. Швидкість попутного вітру обмежується за запасами
поздовжнього керування у разі гранично-заднього центрування вертольота і
через можливість потрапляння гарячих газів на вхід у двигуни.
Не менш важливим під час зльоту є дотримання обмежень за
темпом переміщення важеля загального кроку НГ вгору і обертами НГ.
Переважно темп обмежений через прийомистість двигуна (двигунів). Зазвичай,
переміщення важеля «крок-газ» швидше, ніж зазначено в Керівництві
з льотної експлуатації, призводить до падіння обертів НГ. Через
те, що оберти НГ зменшуються не відразу, можливий навіть відрив
вертольота від землі і набір висоти, але потім неминуче відбувається
самовільне зниження справного в усіх відношеннях вертольота. Тому, щоб не
сталося мимовільного зниження вертольота, пілот має постійно контролювати
темп переміщення важеля загального кроку НГ і число обертів НГ.
Крім того, навіть якщо двигуни мають досить високу прийомистість, пілот
змушений дотримуватися певного темпу переміщення важеля «крок-газ». Загалом пілоту доводиться перед зльотом ураховувати досить
велику кількість суперечливих чинників, щоб забезпечити безпеку зльоту і
польоту. Виконання контрольного висіння дає змогу пілоту ще раз переконатися
в наявності певного запасу потужності для виконання зльоту та в надійності
роботи СУ, всіх систем і агрегатів вертольота. Крім того, контрольне
висіння необхідно і для визначення можливості посадки з урахуванням
передбачуваних або відомих умов на майданчику майбутнього приземлення. Безумовно, для визначення запасу потужності на висінні,
особливо у високогірних умовах, потрібен певний досвід. Проте, як показує
практика, можна рекомендувати для перевірки можливостей вертольота такі правила.
У всіх випадках, якщо польотна маса вертольота не дає змогу
застосувати обраний спосіб зльоту, необхідно її зменшити.
Зліт по-вертолітному є майже для всіх вертольотів основним
способом зльоту. Він простий за технікою виконання і достатньою мірою
забезпечує безпеку польоту за зльоту з майданчиків обмежених розмірів. Цей
спосіб зльоту можна виконувати з різними траєкторіями (види зльоту), які визначаються такими
умовами: розміром майданчика, висотою перешкоди, підходами, перевищенням
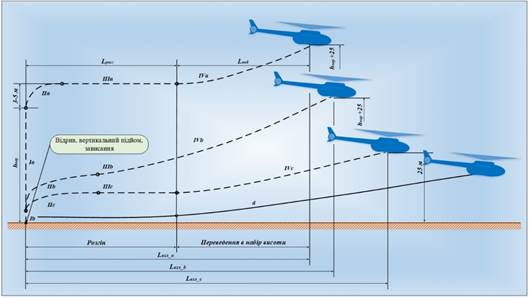
над рівнем моря, температурою зовнішнього повітря, злітною масою вертольота (рис. 3.2.4). Траєкторію зльоту по-вертолітному можна умовно розділити на
чотири характерних етапи: I – відрив вертольота від землі і вертикальний підйом зі
швидкістю 1–1,5 м/с; II – короткочасне зависання і плавний перехід на розгін; III – горизонтальний або нахилений розгін до швидкості 0,5–0,7 від Vек: IV – перехід у набір висоти з подальшим збільшенням
швидкості до Vпр = Vек. Зліт по-вертолітному можна виконувати: а) з розгоном у зоні впливу повітряної подушки; б) за нахиленою траєкторією; в) з розгоном поза зоною впливу повітряної подушки.
1. Зліт по-вертолітному з розгоном у зоні впливу
повітряної подушки застосовується, зазвичай, з майданчиків, що мають
відкриті підходи (на аеродромах). З навчальною метою такий
вид зльоту виконують з неповним використанням усього надлишку потужності (а саме, за роботи двигунів на
номінальному режимі), щоб був ще, так би мовити, «невикористаний» запас і щоб не створювати на
розгоні поблизу землі великі негативні кути тангажу. Перевагою такого виду зльоту по-вертолітному треба вважати
можливість виконання зльоту з майданчиків обмежених розмірів, які не мають
перешкод у напрямку зльоту. Цей вид зльоту набув найбільш широкого
застосування. 2. Зліт по-вертолітному за нахиленою траєкторією рекомендується застосовувати
на майданчиках обмежених розмірів, що мають у напрямку зльоту перешкоди
заввишки 3–5 м. Цей
вид зльоту має перевагу – він дає змогу цілком використовувати максимальну
злітну потужність СУ водночас на розгін швидкості й набір висоти. Особливо раціонально застосування цього виду зльоту на
вертольотах, які мають значний запас потужності. Крім того, такий вид зльоту
найбільш безпечний на випадок відмови обох двигунів, тому що вертоліт слідує
фактично «коридором
безпеки» (рис. 3.2.3) і може здійснити посадку на
майданчик зльоту, а за відмови одного з двигунів такий вид зльоту забезпечує
навіть продовження польоту. 3. Зліт по-вертолітному з розгоном поза зоною впливу
повітряної подушки застосовується також із майданчиків обмежених
розмірів, коли маса вертольота дає змогу виконати висіння над майданчиком на
висоті, що перевищує радіус НГ. Такий вид зльоту використовують для
перевезення вантажів на зовнішній підвісці, під час зльоту із запорошених
майданчиків або майданчиків, покритих снігом, який щойно випав, а також і з
навчальною метою. Такий зліт виконується майже за повного використання
потужності двигунів, а саме на граничній можливості НГ. Крім того, за
такого зльоту вертоліт входить у небезпечну зону I (рис. 3.2.3).
Під час виконання зльоту необхідно, дотримуючись зазначених
обмежень, відокремити вертоліт від землі. Переміщення важелів керування має
бути координованим, парирувати тенденції вертольота до крену і розвороту
ліворуч. Набравши необхідну для того чи іншого виду зльоту висоту з
вертикальною швидкістю 1–1,5
м/с, слід виконати короткочасне зависання (висіння), потім плавним переміщенням ручки керування від себе
і з одночасним збільшенням загального кроку НГ перевести вертоліт на
розгін, зберігаючи при цьому координацію напрямку польоту і висоту. Після
досягнення швидкості, що дорівнює приблизно (0,5–0,7) Vек, плавно перевести вертоліт
у набір висоти з подальшим збільшенням швидкості до Vпр = Vек, яка майже на всіх
вертольотах є найвигіднішою швидкістю набору висоти. Особливість зльоту на деяких типах вертольотів, із шасі, що
випускаються в польоті, полягає в тому, що після встановлення швидкості
доцільно прибрати шасі, тому що на великих швидкостях погіршується
економічність польоту. Зліт вважається закінченим після досягнення висоти
стандартної перешкоди – 25 м.
Зліт
по-літаковому застосовується на вертольотах рідше, зазвичай, з
перевантажувальною масою в умовах, коли провести зліт іншими способами
практично неможливо через нестачу потужності СУ. Цей зліт вимагає
рівного майданчика (вертодрому)
для
розбігу, щоб виключити можливість виникнення земного резонансу. Зліт із запорошених (засніжених) майданчиків зі щільним і рівним ґрунтом (сніжним покривом), розміри яких перевищують
довжину злітної дистанції, більш раціонально виконувати по-літаковому з
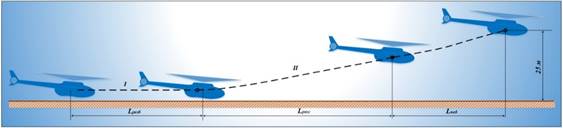
відривом вертольота після того, як запорошена (снігова) хмара залишиться позаду нього. Траєкторію зльоту по-літаковому умовно можна розділити на
три етапи (рис. 3.2.5): - I – розбіг по землі до
швидкості відриву (Vотр ≈ 0,5Vек); - II – відрив
і витримування з розгоном швидкості в зоні впливу повітряної подушки; - III – переведення
в набір висоти з подальшим розгоном до швидкості найвигіднішого набору висоти
(Vпр = Vек).
Особливості виконання зльоту, виходячи з перерахованих етапів: 1) плавно відхилити ручку керування від себе з одночасним
переміщенням важеля загального кроку НГ вгору до досягнення потужності
Nе,ном, а правою
педаллю вперед зрушити вертоліт і виконати розбіг до швидкості 0,5Vек, потім
подальшим збільшенням загального кроку НГ до Nе,взл і невеликим переміщенням ручки керування
на себе відокремити вертоліт від землі; 2) у процесі розгону за надмірно великого відхилення ручки керування від себе
майже для всіх одногвинтових вертольотів характерно прагнення відірвати від
землі спочатку основні колеса. Зліт із переднього колеса небезпечний через
можливість його руйнування, тому що за підвищеного навантаження та великої
швидкості (понад 80 км/год) можуть виникати мимовільні
коливання носового колеса (явище шиммі). Тому пілот має стежити за
поведінкою вертольота і своєчасним узяттям ручки керування на себе парирувати
цю тенденцію вертольота; 3) після відриву з поступовим відходом від землі вертоліт
розганяється до швидкості 0,7 Vек
і плавно переводиться в набір висоти з розгоном до Vпр = Vек.
Посадка, так само як і зліт, являє собою маневр, оскільки
всі її елементи виконуються разом у певній послідовності, взаємопов’язані між
собою і призначені для однієї мети – зробити безпечне приземлення на заданому
(необхідному) місці. У посадку входять багато
з викладених вище режимів: зниження за нахиленою траєкторією з працюючими
двигунами (планування на РСНВ), виведення з планування з одночасним гасінням
швидкості (вирівнювання), майже горизонтальне гальмування (витримування),
висіння, вертикальне зниження, приземлення і пробіг. З позиції
енергетики, посадка – це неусталений (уповільнений) рух, під час якого гаситься кінетична енергія
вертольота для безпечного приземлення. Для виконання посадки без бічних зсувів і втрати напрямку
слід чітко дотримуватися умов бічної рівноваги координованим відхиленням
важелів керування. У процесі гальмування, вирівнювання і витримування
необхідно забезпечити зниження вертольота за заданою траєкторією із заданими
вертикальною і поступальною швидкостями. Виконуючи перераховані режими, треба
стежити за тими особливостями роботи НГ і СУ, які було
розглянуто вище, щоб не допустити виходу вертольота за обмеження і
потрапляння в самовільне зниження і розворот. На вертольотах застосовують два способи посадки: по-вертолітному
і по-літаковому.
Застосування того чи іншого способу посадки зумовлено
розмірами і покриттям майданчиків, польотною масою вертольота, запасом
потужності, зовнішніми умовами. Розгляньмо основні експлуатаційні обмеження та деякі
особливості під час виконання того чи іншого способу посадки: 1) насамперед,
будуючи маневр, для виконання посадки необхідно враховувати зазначені основні
небезпечні за відмови двигуна (двигунів) зони I і II (рис. 3.2.3). Оптимальною можна вважати
траєкторію, яка за швидкостями і висотами розташовується в «коридорі
безпеки» між цими зонами. Всі перераховані обмеження для зльоту за
зовнішніми умовами, темпом переміщення важеля загального кроку НГ та
інші застосовуються і до посадки. Крім того, під час посадки по-літаковому Vпос має
дорівнювати або бути близькою Vотр.; 2) захід і
розрахунок на посадку виконують побудовою прямокутного маршруту або з
прямої. У процесі побудови такого маневру необхідно випустити шасі (на тих вертольотах, де воно
прибирається в польоті) і уточнити швидкість і напрямок вітру. Для
полегшення загалом складного процесу виконання посадки захід на посадку
рекомендується проводити чітко проти вітру. Це збільшує запаси за потужністю
і шляховим керуванням, необхідні в інтересах більшої безпеки. Розрахунок на посадку, зазвичай, уточнюється на зниженні зі
зміни поступальної і вертикальної швидкостей польоту приблизно до висоти 100 м, при цьому віддалення
від місця приземлення має бути не менше ніж 1000 м. З цієї висоти, зазвичай, пілот виконує
передпосадкове зниження і фактично з цього моменту можна вважати, що
виконується посадка. У ході такого маневру пілот прагне виконати рух за
заданою траєкторією (глісадою) зниження для приземлення
чітко в зазначеному (обраному) місці; 3) у процесі зниження за
нахиленою траєкторією треба поступово гасити поступальну і вертикальну
швидкості, щоб до місця приземлення підійти з нульовою поступальною і
вертикальною швидкостями.
Посадка по-вертолітному майже для всіх вертольотів є
основним способом посадки. Її настільки широко застосовують завдяки простоті
техніки виконання та наявності у вертольотів запасу потужності, що забезпечує
безпеку приземлення навіть на майданчику обмежених розмірів із перешкодами на
підходах. Цей спосіб посадки можна виконувати за різними траєкторіями, які
тією чи іншою мірою зумовлюються багатьма експлуатаційними чинниками, як-от
розмір майданчика, висота перешкод, підходи, перевищення над рівнем моря,
температура зовнішнього повітря, польотна (посадкова) маса тощо. Траєкторію
посадки по-вертолітному можна умовно поділити на такі найбільш
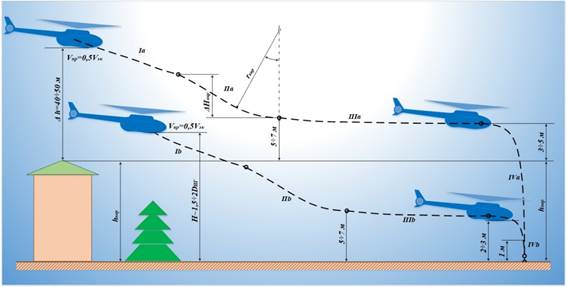
характерні етапи (рис. 3.2.6): - І –
вирівнювання (зниження) з Н = (1,5–2) DнГ за нахиленою траєкторією на
швидкості 0,7Vек
з вертикальною швидкістю 2–3
м/с за гальмування вертольота до швидкості
польоту 0,5 Vек і
вертикальної швидкості 0,5–1
м/с; - II –
витримування (подальше
зменшення швидкості до зависання) з одночасним гасінням
вертикальної швидкості до нуля; - ІІІ –
короткочасне зависання й вертикальне зниження з Vу = 2 4 1,5 м/с до висоти 1 м; - IV –
вертикальне зниження з висоти 1 м
з поступовим гасінням Vy
до 0,2–0,1 м/с і
приземлення.
1. Посадка по-вертолітному із зависанням у зоні впливу
повітряної подушки (рис. 3.2.5, а) застосовується для приземлення як на майданчики обмежених
розмірів із відкритими підходами і невисокими перешкодами (3–5 м), так і на аеродроми й підготовлені
майданчики з навчальною метою. Цей вид посадки має ту перевагу (порівняно з іншими видами
посадки), що дає змогу здійснити посадку на майданчик обмежених розмірів
із мінімальним запасом потужності. Він забезпечує досить високу безпеку
польоту і, крім того, простий за технікою пілотування і виконання розрахунку.
Особливістю цієї посадки є те, що вирівнювання закінчується на висоті, що
дорівнює приблизно половині радіуса НГ вертольота (рис. 3.2.5, а), в подальшому витримування і зависання виконують на
швидкостях і висотах (1–2 м), де найбільш ефективний вплив
повітряної подушки. 2. Посадка по-вертолітному із зависанням поза зоною впливу повітряної подушки застосовується для приземлення на майданчики
обмежених розмірів із перешкодами на підходах заввишки більше радіуса НГ
вертольота. Цей вид посадки використовується і у випадках здійснення посадок
на запорошених майданчиках, майданчиках, покритих снігом, який щойно випав,
під час перевезення вантажів на зовнішній підвісці, а також із навчальною
метою. Така посадка виконується, зазвичай, за повного використання потужності
двигунів і, звичайно, більш небезпечна за їх відмови, тому що вхід і
зависання здійснюються в небезпечній зоні
I (рис. 3.2.3). 3. Особливості виконання посадки по-вертолітному Після проходу контрольної точки Н = 100 м із заданими Vпр
і Vy пілот починає плавним відхиленням
ручки керування на себе зменшувати поступальну швидкість. При цьому почне
збільшуватися вертикальна швидкість, тому що політ виконується на швидкостях другого
режиму. Але згідно з прийнятим законом збереження кута нахилу траєкторії
необхідно, щоб вертикальна швидкість не збільшувалася, а навпаки,
зменшувалася. Тому друга обов’язкова умова – збільшення загального кроку НГ.
Темп гасіння вертикальної і поступальної швидкостей має бути таким, щоб за
виходу на висоту (1,5–2,0) Dнв
швидкість Vпр
дорівнювала (0,5–0,7) Vек,
a Vy дорівнювала
0,1 Vпр. Збільшувати
загальний крок НГ і кут тангажу треба з таким розрахунком, щоб не
допускати збільшення вертикальної швидкості більше 2 м/с. Надалі більш енергійним переміщенням ручки керування на себе
і збільшенням загального кроку НГ вертоліт виводять з кута планування.
При цьому не можна (майже для всіх
одногвинтових вертольотів) різко і надмірно збільшувати кут тангажу (більше ніж 100). У разі якщо вертикальна швидкість
зменшується недостатньо, швидко ще додатково збільшити загальний крок НГ. За енергійного збільшення кута тангажу НГ швидко
переходить на позитивні кути атаки. При цьому збільшуються оберти НГ і
внаслідок цього скидається потужність двигунів (зменшуються оберти турбокомпресора nтк). У наступну мить, коли вертоліт закінчить
вирівнювання, через швидке зменшення швидкості в момент відхилення ручки
керування від себе починають зменшуватися оберти НГ. Як результат
розвивається мимовільне зниження вертольота, іноді супроводжується
розворотом, тому що і тяга РГ зменшується. Таке різке вирівнювання зі
збільшенням кута тангажу більше ніж 100
на вертольотах із ГТД потрібно вважати помилкою льотчика. Крім того, в процесі вирівнювання можна запізнитися зі
збільшенням загального кроку НГ, тому що пізнє та різке переміщення
призводить, зазвичай, до перетягування важеля «крок-газ» і
перенавантаження НГ. У процесі підходу вертоліт проходить так звану швидкість
тряски, тривалий політ на якій небажаний. Тому на цій швидкості доцільно не
затримуватися, для чого своєчасно збільшується загальний крок НГ і,
щоб кут тангажу не перевищував 100,
ручка віддається від себе. Ці дії відбуваються майже над місцем приземлення
на заданій висоті, в цей момент вертольоту надається посадкове положення,
потім плавним відхиленням важеля загального кроку НГ донизу
встановлюється вертикальна швидкість зниження 1 м/с, яка гаситься поступово на висоті 1 м, і в подальшому
витримується Vy
не більше ніж 0,2 м/с до
приземлення. Після приземлення спільний крок НГ необхідно відразу ж
скинути до упору і вивести корекцію.
Посадка по-літаковому
застосовується на вертольотах рідше, за винятком
вертольотів Мі-6, де цей
спосіб посадки вважається основним. Застосування посадки по-літаковому обмежено через деяку
складність виконання приземлення і можливості виникнення земного резонансу,
шиммі переднього колеса, руйнування рульового гвинта, вузлів підвіски
двигунів та інших агрегатів конструкції за грубого приземлення. Однак такий спосіб посадки застосовується
на всіх вертольотах вимушено за перевантажувальної маси для таких умов, коли
посадку по-вертолітному виконати неможливо через брак потужності, а, крім
того, за відмови (вимкнення) двигуна. На рис. 3.2.7 а, б наведено різні види
траєкторії посадки по-літаковому за працюючих двигунів і на режимі
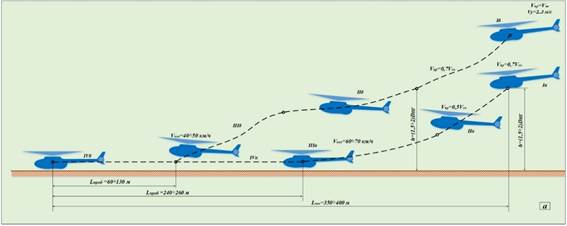
самообертання НГ. Траєкторію посадки по-літаковому можна умовно поділити на
чотири послідовні етапи (рис. 3.2.7 а): I передпосадкове зниження (планування) до Н = (1,5–2) Dнв
за нахиленою траєкторією з гальмуванням вертольота до Vпр = 0,7 Vек; II вирівнювання (виведення з кута зниження) в зниженні до 3–5 м з гальмуванням
вертольота до Vпр = 0,5
Vек і гасінням вертикальної швидкості до 0,5 м/с; III витримування (гальмування вертольота до Vпос) з гасінням вертикальної
швидкості до 0,2 м/с і зниженням до h = 1 м; IV приземлення з Vy = 0,1–0,2 м/с і
пробіг із гальмуванням до повної зупинки. Посадка по-літаковому з працюючими двигунами застосовується в разі браку
потужності для виконання посадки іншим способом (із навчальною метою) тільки на спеціальний майданчик (аеродром), що забезпечує безпечний
пробіг після приземлення. Основна її перевага – можливість виконання
безпечної посадки на майданчик порівняно невеликих розмірів (завдовжки 250÷300 м) з перевантажувальною масою вертольота. Це значно підвищує
економічність використання вертольотів у конкретних умовах експлуатації.
Особливістю посадки по-літаковому з працюючими двигунами є
зниження за більш пологою траєкторією, ніж за посадки по-вертолітному, до
того ж вертоліт знижується в точку початку вирівнювання, яка має відстояти
від точки приземлення приблизно на 150–200
м (залежно від типу вертольота), на висоті, що приблизно дорівнює
висоті стандартної перешкоди – 25 м,
швидкість за траєкторією в цій точці дорівнює 0,7 Vек, вертикальна швидкість при цьому може
досягати 3–5 м/с. Вирівнювання виконується більш
плавно з одночасним збільшенням загального кроку НГ з таким розрахунком,
щоб закінчити його на висоті 2–3
м на V = 0,5 Vек
і щоб вертикальна швидкість зменшилася до 0,5 м/с. Далі після невеликого витримування вертоліт плавно
приземляється, при цьому його можна ще «підтримати» зміною загального кроку НГ. Після приземлення необхідно зменшити загальний крок НГ,
ручку керування поставити в нейтральне положення й загальмувати колеса. На
деяких вертольотах можна здійснити гальмування гвинтом, для чого ручку
керування після приземлення слід трохи відхилити на себе (але не до упору, тому що
збільшується ймовірність удару лопатями по хвостовій балці). Відпрацювання такої глісади зниження на посадці в звичайних
польотах необхідне для застосування в разі відмови одного з двигунів.
Особливістю посадки з одним двигуном, що відмовив, як порівняти зі звичайною
посадкою по-літаковому, є більш енергійне та більш потрібне збільшення кроку НГ
за виконання «підриву» для забезпечення м’якого
приземлення (з Vy
= 0,2 м/с).
Посадка на РСНГ
– режимі самообертання несучого
гвинта (двигуни
відмовили або вимкнені) є різновидом способу посадки по-літаковому. Посадка
на РСНГ за методикою виконання значно
відрізняється від описаної вище за працюючих двигунів більш крутої глісади
планування одночасним виконанням вирівнювання і «підриву» та швидкоплинністю всіх основних етапів посадки.
Зазвичай, планування на РСНГ виконують на Vек. Розрахунки показують, що кут планування на
Vпр = Vек
майже для всіх вертольотів є в межах 14–160. А це означає, що для
розрахунку обраного майданчика, на який може спланувати вертоліт,
рекомендується застосувати правило для грубої прикидки: вибір майданчика
дорівнює приблизно чотирьом висотам (за планування на швидкості найбільшої дальності вибір дорівнює п’яти
висотам). За планування на РСНГ з
поступальною швидкістю вертоліт володіє запасом кінетичної енергії руху та
обертання НГ. Фізичний сенс посадки вертольота на РСНГ полягає
в тому, що кінетичну енергію руху вертольота і обертання НГ пілот
використовує за дії важелями керування в інтересах зменшення до мінімального
значення вертикальної швидкості в момент приземлення.
1. Метод по-літаковому може бути застосований у разі
відмови керування важелем загального кроку НГ, коли неможливо
перемістити його догори. При цьому для безпечного приземлення і пробігу
необхідний рівний без купин майданчик (аеродром) з відкритими підходами, тому що у вертольота буде
досить велика швидкість приземлення і через це збільшений пробіг. Крім того,
цей метод вимагає значного збільшення кута тангажу (до 15–180), щоб вивести вертоліт із планування. На одногвинтових
вертольотах це створює небезпеку торкання поверхні землі рульовим гвинтом. 2. Метод з «підривом» у чистому вигляді
застосовується теж тільки у виняткових випадках, зазвичай, за відмови одного
або обох двигунів на вертикальних режимах, а також під час польоту на малих
швидкостях і гранично-малих висотах, коли немає можливості перейти на
поступальний політ. Крім того, цей метод важкий для пілота через необхідність
точного розрахунку початку переміщення важеля загального кроку НГ
догори, щоб забезпечити безпечне приземлення. Отже, із навчальною метою його
виконувати не можна. Сутність цього
методу – реалізувати енергетичні можливості НГ, що
обертається, для гасіння вертикальної швидкості. Обертаючись, гвинт може
віддати значну кількість енергії (потужності) повітряному потоку за
раціонального його використання, отже, здатний погасити значну вертикальну
швидкість. Однак важливо пам’ятати, що цією можливістю НГ можна
скористатися лише один раз і час цього використання обмежений часом падіння
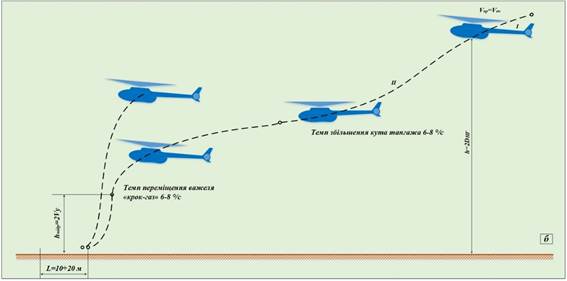
обертів НГ приблизно до 70%. На рис. 3.2.7, як приклад, показана залежність часу «підриву» для гасіння різних вертикальних
швидкостей за вертикального зниження на вертольоті Мі-8. Вертикальний шлях, пройдений при цьому вертольотом (втрата висоти), дорівнює приблизно двом
вертикальним швидкостям зниження перед початком виконання «підриву», а саме: Нподр = (1,5–2) Vy
(рис. 3.2.6). У момент підходу вертольота
до висоти «підриву» необхідно енергійно за
півтори – дві секунди перемістити важіль «крок-газ» до крайнього верхнього положення з темпом 6–80/с, не
допускаючи збільшення кута тангажу, крену і бічних переміщень. Збереження
обертів НГ в експлуатаційних межах перед початком виконання «підриву» є необхідною умовою для
успішного виконання безпечної посадки. На рис. 3.2.7 наведено величини
вертикальних швидкостей, які можна погасити за максимальних і мінімальних
обертів НГ у момент «підриву». Збереження обертів НГ
в експлуатаційних межах перед початком виконання «підриву» є необхідною умовою для успішного виконання
безпечної посадки. На рис. 3.2.8 наведено величини вертикальних
швидкостей, які можна погасити за максимальних і мінімальних обертів НГ
в момент «підриву». Темп падіння обертів за «підриву», як показує практика, перебуває в межах 10%/с, а оберти НГ, за
яких НГ не створює перевантаження пу
≥ 1,
дорівнюють приблизно 70%.
За «підриву» з обертів 100% несучий гвинт протягом 3 с створює перевантаження nу = 1,8–1,6,
а з обертів 85% протягом 1,5 с – перевантаження не
більше ніж 1,5. З цього
прикладу і простого розрахування зрозуміло, наскільки важливим є збереження
обертів НГ за відмови двигунів.
Несучі гвинти вертольотів Мі-2, Мі-6 і Мі-8 можуть, поки падають оберти НГ до
70%, погасити вертикальну
швидкість зниження до 12–14
м/с, необхідна висота при цьому має бути 20–28 м. Така сама закономірність зберігається і
для менших швидкостей вертикального зниження (наприклад, якщо Vy
= 6–8 м/с Нподр. = 10–15 м). Але якщо вертикальна
швидкість зниження буде більше ніж 15
м/с, погасити її цілком практично не вдається. У цьому і полягає
небезпека зазначеної вище зони I
(рис. 3.2.3). Під час виконання «підриву» можливі дві помилки пілота: ранній або пізній
початок виконання «підриву». За раннього початку
переміщення важеля «крок-газ» вгору можливе передчасне
зависання і потім падіння вертольота із заданої висоти. За пізнього
переміщення важеля «крок-газ» тяга НГ не встигає до
кінця погасити вертикальну швидкість, при цьому теж можливий удар з непогашеною
вертикальною швидкістю. Тому пілоту необхідно тренувати окомір у точному
визначенні висоти, порівнюючи її з величиною вертикальної швидкості зниження,
що дасть змогу значно скоротити небезпечну зону і в аварійній ситуації
забезпечить збереження вертольота та життя екіпажу. 3. Комбінований метод посадки на РСНГ був найбільш поширеним. Він являє собою синтез двох
попередніх методів і дає змогу найбільш повно використовувати енергетичні
можливості НГ і вертольота. Перевагою такого методу є можливість виконання посадки з
мінімальною вертикальною і поступальною швидкостями, що забезпечує безпечне
приземлення на непідготовлений майданчик з мінімальним пробігом, навіть за
відмови всіх двигунів, на гранично малій-висоті. Однак під час виконання
посадки комбінованим методом необхідне чітке виконання вказівок Керівництва
з льотної експлуатації з витримування швидкості планування, висоти
початку вирівнювання і моменту початку виконання «підриву». Швидкість планування, близьку до економічної,
приблизно до висоти початку вирівнювання доцільно витримувати майже на всіх
вертольотах. Початок вирівнювання визначають візуально за висотою
залежно від типу вертольота і його маси в межах 30–50 м. Вирівнювання необхідно виконувати
енергійним переміщенням ручки керування на себе зі збільшенням кута тангажу
до 150.
Енергійне виведення з планування дає (через збільшення кута атаки НГ) додаткову розкрутку НГ
і більш енергійне зменшення поступальної швидкості. При цьому вертикальна
швидкість може зменшитися на 3–4
м/с і вертоліт має бути виведений на висоту 10–15 м. Зростання обертів НГ в цьому
випадку – дуже важливий чинник для успішного виконання «підриву». Наступний важливий етап – це надання вертольоту посадкового
положення і визначення висоти виконання «підриву» (Нподр). «Підрив» у такому випадку, на відміну
від розглянутого вище, має свої особливості, оскільки вертикальна швидкість
менше і вертоліт має певну поступальну швидкість. Початок переміщення важеля «крок-газ» має бути на висоті Нподр. = 1,5 Vy,
а темп переміщення важеля «крок-газ» такий самий –
6–80/c.
Переміщати важіль «крок-газ» слід також безперервно і до відмови. За
комбінованого методу посадки, як порівняти з посадкою по-літаковому необхідно
в момент виконання «підриву» більш енергійно зменшувати позитивний кут тангажу до посадкового
значення для цього вертольота.
Під час виконання виконанні посадки з граничною масою іноді
пілоти змушені будувати маневр для заходу на майданчик із бічним вітром,
швидкість якого близька або перевищує обмеження за Керівництвом з льотної
експлуатації. Це може статися, наприклад, у горах, в ущелині або в
бойовій обстановці. У цих випадках, щоб виключити потрапляння одногвинтового
вертольота на зависанні в мимовільний розворот ліворуч, необхідно вести
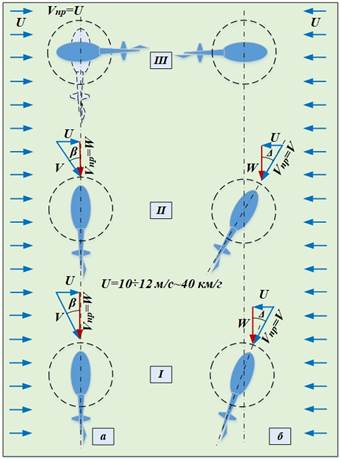
боротьбу зі зносом. 1. За лівого бічного вітру доцільно здійснювати боротьбу
зі зносом на посадковому курсі за допомогою ковзання (рис. 3.2.9). Для цього пілот у процесі
зниження і передпосадкового гальмування кренить вертоліт у бік вітру,
зберігаючи прямолінійний рух і компасний курс (КК) постійними. Тут, з погляду
практичної аеродинаміки, є кілька позитивних чинників. Прибираючи правий
крен, пілот зменшує складову Тz,
отже, НГ працює більш економічно, майже всю тягу витрачаючи на
урівноваження сили тяжіння. Бічна рівновага сил і моментів зберігається за
допомогою бічної сили фюзеляжу, що створюється як результат ковзання. А у
зв’язку з тим, що ковзання саме по собі діє ще і як «гальмівні щитки», в цьому випадку гальмування
виходить трохи більш енергійним унаслідок шкідливого опору фюзеляжу. Хоча за
такого руху права педаль дається вперед.
На рис. 3.2.9, а
наведено три положення фюзеляжу на трьох характерних етапах посадки (I – вирівнювання, II – витримування і III – зависання). У момент зависання вертоліт сам прагне розвернутися проти
вітру, до того ж у процесі такого розвороту кутова швидкість обертання зменшується
і вертоліт зависає проти вітру. 2. За правого бічного вітру боротися зі знесенням,
здійснювати посадку раціонально курсовим методом. При цьому пілот у процесі
вирівнювання і витримування весь час докручує вісь вертольота праворуч, на
вітер, зберігаючи водночас напрямок руху (рис. 3.2.9, б). У разі посадки з бічним
вітром, коли його швидкість перевищує значення, допустимі за Керівництвом
з льотної експлуатації, важливо не допустити ненавмисного розвороту
ліворуч. Пілот, повертаючи вертоліт у напрямку вітру (змінюючи курс), забезпечує косе обтікання РГ
і необхідний запас ходу правої педалі навіть на зависанні. До моменту
зависання (положення III) вертоліт фактично вже
розвернено проти вітру. Якщо для прикладу взяти швидкість вітру для Мі-8 10–12 м/с (Vпр = 40 км/год), то на вирівнювання (положення) необхідно вже розвернути вертоліт від курсу посадки
на кут 300, а в
процесі витримування (положення II), коли Vпр = 50 км/год, кут відвороту α = 450. За
відповідного тренування такий метод заходу на посадку не є особливо складним.
Практика показала, що, якщо з правим вітром боротися за допомогою ковзання (як у першому випадку), то потрібно створювати
порівняно великий правий крен. Велике значення поперечної сили (Тz) – в цьому випадку «з’їдає» частину підіймальної сили НГ, а в момент
зависання, коли потрібна повна потужність СУ, додаткові витрати
потужності викликають зменшення обертів НГ, мимовільне зниження і
мимовільний розворот ліворуч, тобто хвостом на вітер.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||