|
|
|
ОСНОВИ
АЕРОДИНАМІКИ ТА ДИНАМІКИ ПОЛЬОТУ частина ІI ДИНАМІКА ПОЛЬОТІВ Електронний посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3. НЕУСТАЛЕНИЙ РУХ ЛІТАЛЬНИХ АПАРАТІВ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
До неусталеного руху вертольота належать: перехідні режиму
польоту, маневрування швидкістю та за висотою польоту у вертикальній та
горизонтальній площині, а також зліт і посадка, на різних етапах яких має
місце неусталений рух вертольота. Основною особливістю неусталеного руху є рух із
прискоренням, як результат на вертоліт діють інерційні сили, отже, має місце
перевантаження.
Перевантаженням є відношення прискорення руху до
прискорення вільного падіння:
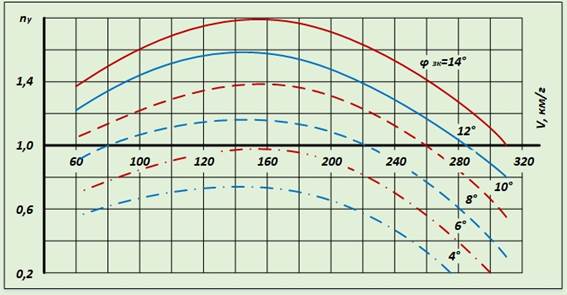
Нормальне перевантаження залежить від значення загального
кроку та швидкості польоту (рис. 3.1.1).
Кількісними характеристиками маневреності вертольота є,
наприклад: чисельні значення радіуса, кутової швидкості і часу виконання
розвороту, час набору висоти за один виток спіралі тощо.
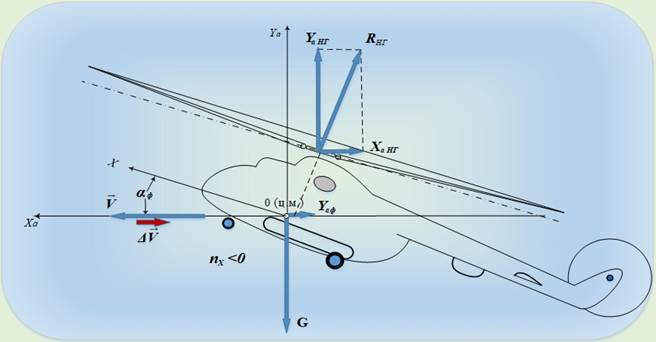
До маневрів у горизонтальному польоті належать розгін і гальмування.
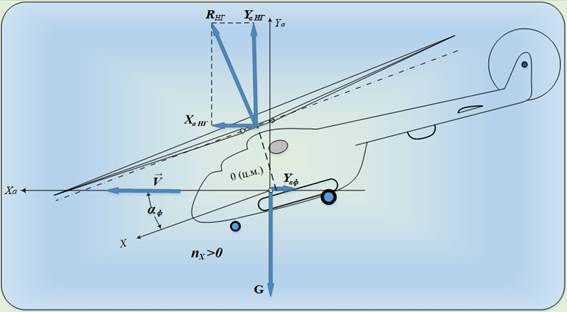
Для виконання горизонтального
розгону необхідно збільшити тягу НГ і зменшити кут тангажу (відхилити
вертоліт уперед). При цьому значення кута
нахилу вертольота визначається умовою збереження постійності висоти польоту (рис. 3.1.2):
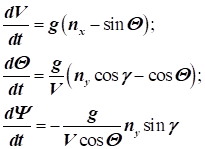
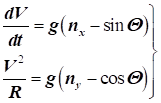
Рівняння руху в перевантаженнях
для горизонтального польоту мають вигляд:
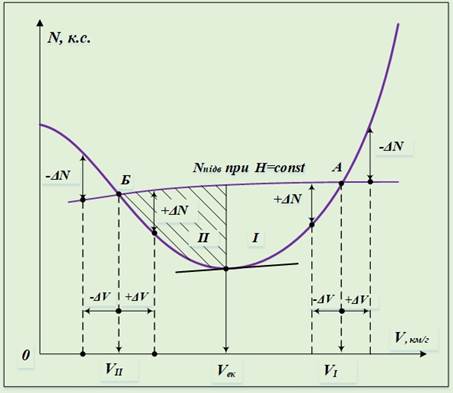
Що більший запас потужності на початковому режимі, то
більшу тягу НГ можна отримати і нахилити вертоліт на більший кут,
тобто створити більше перевантаження ( Максимальний темп розгону буде
на злітній потужності, при цьому час розгону в заданому діапазоні швидкостей
буде мінімальним. Максимальний темп розгону
досягається на малих швидкостях. У міру приближення до кінцевої швидкості
темп суттєво зніжується, а час маневру швидко збільшується. У процесі введення вертольота в
розгін унаслідок зменшення кута атаки і збільшення загального кроку НГ
його частота обертання зменшується. Отже, розгін в усьому діапазоні
швидкостей здійснюється за мінімально допустимої частоти обертання НГ,
і це визначає гранично можливий темп горизонтального розгону.
Рівняння руху мають такий самий вигляд, як і у випадку
розгону, але в цьому випадку поздовжнє перевантаження буде негативним. Це
означає, що
Також за зменшення швидкості проявляється тенденція
вертольота до лівого крену і розвертання праворуч, що зумовлено змінами
бічного балансування вертольота залежно від швидкості польоту.
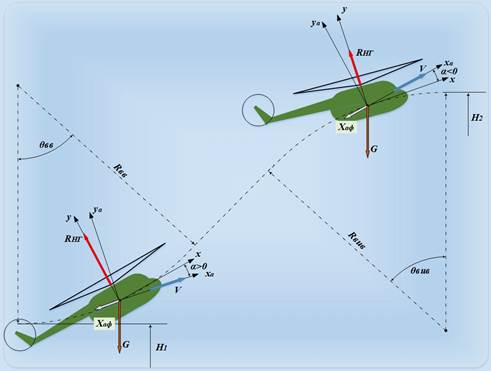
• введення в набір висоти з режиму горизонтального польоту; • виведення з режиму набору висоти в горизонтальний політ; • введення в зниження (пікірування) з режиму горизонтального польоту; • виведення з режиму зниження в горизонтальний політ. Пікірування з кутом нахилу траєкторії з кутом до 300 називається
положистим, а з кутом більше 300
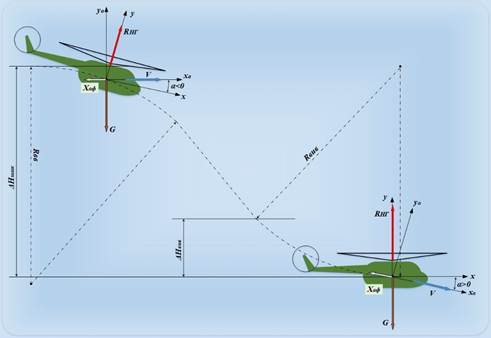
– стрімким. На рис. 3.1.5 показано схеми сил за введення в набір
висоти і виведення з набору в горизонтальний політ (фігура «гірка»).
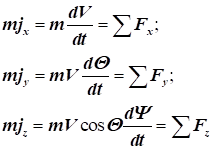
Рівняння руху вертольота під час виконання «гірки»
випливають із загальних рівнянь несталого руху за умов –
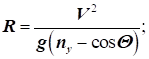
З цих рівнянь випливають формули радіуса, кутової швидкості
і зміни висоти:
Через те що пікірування є ніби дзеркальним відображенням
гірки, то рівняння руху будуть такими самими. Пікірування складається із
введення, зниження за нахиленою траєкторією і виведення. Виведення з
пікірування є найбільш відповідальним етапом маневру, особливо на малих
висотах, тому що під дією інерційних сил виникає так зване «осідання» – додаткова втрата висоти.
Осідання в процесі виведення з пікірування зворотно пропорційно прирощуванню
нормального перевантаження
Віраж із креном до 450
– неглибокий, з креном більше ніж 450
– глибокий. Правильний віраж – це віраж, який виконують
зі сталими швидкістю і кутом крену без ковзання. Траєкторія правильного
віражу – коло зі сталим радіусом (R) (рис. 3.1.7). Якщо правильний віраж виконують з граничним для цієї
швидкості значенням нормального перевантаження, то називається граничним віражем з перевантаження.
Рівняння руху на правильному віражі мають вигляд:
Виходячи з рівнянь руху на правильному віражі, можливо
визначити його характеристики:
Неправильний віраж, на відміну від правильного, виконується
з ковзанням. Ковзання може бути як внутрішнім, так і зовнішнім. Наявність
ковзання зумовлює появу бічного перевантаження (nz). Це призводить до відхилення
повної аеродинамічної сили НГ (Rнг) від площини симетрії на кут
крену:
Зовнішнє ковзання збільшує нахил Rнг
у бік розвороту і водночас збільшує потрібне значення
нормального перевантаження без зниження за цього кута крену:
Це потребує або збільшення потужності, або зміни швидкості
для забезпечення нового значення наявного перевантаження. Зовнішнє ковзання
погіршує пілотування вертольота і знижує безпеку польоту за виконання маневру
на малих висотах. За внутрішнього ковзання кут нахилу результуючої сили (Rнг) у бік
розвороту зменшується, тому зменшується потрібне значення нормального
перевантаження за заданого кута крену. Тому внутрішнє ковзання більш
сприятливе з погляду безпеки польоту. Найбільш поширеним просторовим
маневром є спіраль – маневр, який поєднує розвертання вертольота з
набором висоти або зниженням. У першому випадку спіраль називають висхідною,
в другому – низхідною. Так само, як і віраж, спіраль
може бути неглибокою – з кутом крену до 450, або
глибокою – з кутом крену більше ніж 450. Основними кінематичними
характеристиками спіралі є: • R – радіус розвертання; • ωсп
– кутова швидкість
розвертання; • Hсп – крок спіралі – набір висоти за один виток, Hсп.
Якщо кінематичні характеристики
траєкторії в процесі виконання спіралі не змінюються, то вона називається
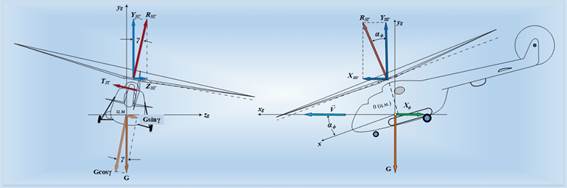
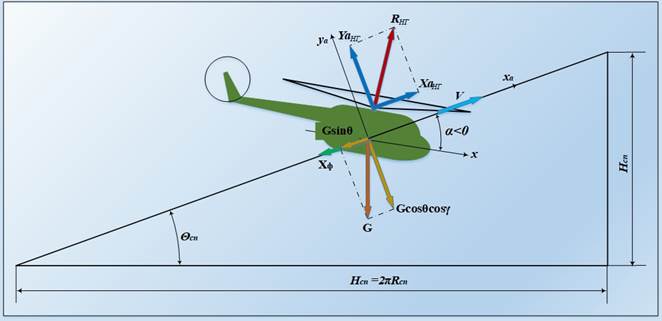
сталою. Схему сил на висхідній спіралі
наведено на рис. 3.1.8. Рівняння спіралі отримуємо з рівнянь руху віражу,
підставивши в них умови сталої спіралі:
Рівняння руху в перевантаженнях
матиме вигляд:
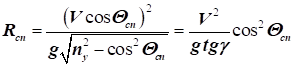
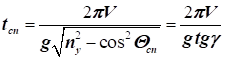
Формули для розрахунків характеристик спіралі:
У низхідній спіралі кут нахилу траєкторії, а також
поздовжнє перевантаження будуть негативними. Як порівняти з правильним віражем потужність двигунів, яка
потрібна для виконання висхідної спіралі, має бути більше за таких саме
значень кута крену і швидкості, тому що, крім розвороту, виконується і набір
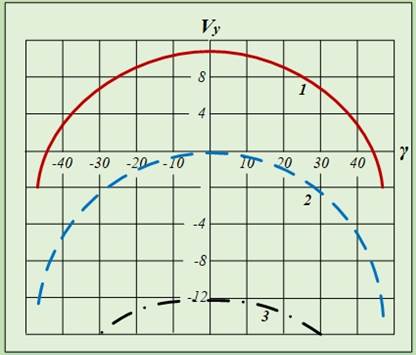
висоти. На рис. 3.1.9 наведено залежність вертикальної швидкості від
кута крену за постійних значень швидкості і загального кроку.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




 ;
; ;
;