|
/ |
|
АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ
ПРОЦЕСІВ І СИСТЕМИ АВТОМАТИЧНОГО
КЕРУВАННЯ Електронний посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
9. СИСТЕМИ ЦЕНТРАЛІЗОВАНОГО КОНТРОЛЮ ТА АВТОМАТИЗОВАНОГО КЕРУВАННЯ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
У процесі
збільшення системи керування один або кілька комп’ютерів роблять більш потужнішими,
їм надаються додаткові права, створюється система з виділеним сервером.
Проблема визначення рангів тісно пов’язана з вибором способу організації
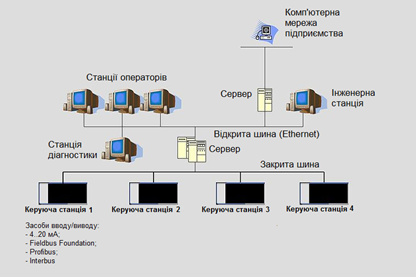
оброблення інформації. За цією ознакою системи поділяються на централізовані і розподілені із серверами.
Такий підхід
забезпечує оптимальність використання ресурсів, стійкість системи до відказів
(вихід із ладу одного вузла не призводить до фатальних наслідків – його легко
можна замінити) , але при цьому постають проблеми
забезпечення розподілу ресурсів безпеки і прозорості (рис. 9.2.1).
Система, в якій клієнт
і сервер працюють спільно і розподіляють завантаження (звідси і термін «розподілена
система»), може забезпечити більшу продуктивність порівняно з серверною. До того
ж вона працює неповністю, а з невеликим набором даних, що забезпечує
паралельність роботи користувачів і мінімальний системний графік. Перевагами
таких систем є також гнучкість, адаптованість, до вимог додатків, оптимальне
використання ресурсів, нарощуваність. Для розподіленої системи вибір адаптера інтерфейсу залежить від типу
інтерфейсу приладів, що підключаються. До одного СОМ-порту можливо підключити
тільки один адаптер інтерфейсу. За необхідності
збільшення кількості каналів, що відображаються, на ПК необхідно встановити
додаткові СОМ-порти. Максимальна кількість СОМ-портів
визначається характеристиками ПК.
Інтерфейси
інформаційного обміну між приладами, що використовуються в промисловості,
можуть бути двох типів: які з’єднують два прилади між собою або
мультиприладний, що дозволяє підключати більше двох приладів на одну лінію
передачі даних. Основна характеристика інтерфейсу – пропускна спроможність, яка показує, скільки
біт інформації передається по інтерфейсу за 1 секунду і вимірюється в bit per second (bps, Mbps), або біт в секунду (бит/с, Мбит/с). Необхідно
враховувати, що ця пропускна спроможність включає «накладні витрати»,
пов'язані із способом передачі даних. Для різних інтерфейсів і протоколів
частка корисної інформації, передаваної в секунду, може бути від 30% до 90%
від загальної пропускної спроможності. Протокол – це стандартизований набір правил передачі інформації
по будь-якому інтерфейсу. Для складних протоколів прийнята практика розділення їх на декілька
рівнів (шарів). При цьому кожен рівень реалізується окремо і додатково
стандартизується обмін між рівнями. Це також дозволяє замінювати якісь рівнів
(наприклад для адаптації до різних інтерфейсів), залишаючи незмінними інші. Сумісність приладів – це їх здатність здійснювати інформаційний обмін між собою. Кожний з
приладів, що беруть участь у інформаційному обміні, повинен мати певний
інтерфейс і розуміти певний протокол. І навіть у цьому випадку не
гарантується можливість обміну, оскільки один прилад може виявитися нездатним
передавати ту інформацію, яку вимагається одержувати іншому. Але що робити,
якщо прилади готові до передачі потрібної інформації, але мають різні
інтерфейси або розуміють різні протоколи? У цьому випадку
потрібне застосування перетворювачів інтерфейсів або шлюзів.
При цьому передача інформації здійснюється без її перетворення. Тому до
перетворювача інтерфейсів має сенс підключати тільки ті пристрої, які здатні
працювати по одному протоколу. Шлюз (або міст) – це інтелектуальний пристрій, здатний до перетворення даних з одного
протоколу в іншій. При цьому шлюз може виступати також і як перетворювач інтерфейсів.
Шлюз, на відміну від перетворювача інтерфейсу, вимагає додаткового
налаштування, оскільки йому необхідно вказати, які дані й по яких протоколах
треба приймати та передавати. Під час проектування промислових систем автоматизації
найбільше поширення набули інформаційні мережі, засновані на інтерфейсі
стандарту EIA RS-485. Це високошвидкісний і перешкодостійкий
послідовний інтерфейс, який дозволяє створювати мережі шляхом паралельного
підключення багатьох пристроїв до однієї фізичної лінії. У звичному персональному комп'ютері (непромислового виконання) цей
інтерфейс відсутній, тому для підключення до ПК промислової мережі RS-485 необхідний спеціальний адаптер-перетворювач
інтерфейсу RS-485/RS-232 або RS-485/USB. По інтерфейсу RS-485 дані передаються за допомогою «симетричного»
(диференціального) сигналу по двох лініях (А і В). Максимальна довжина лінії зв'язку між крайніми пристроями може складати
до Вживані в приладах протоколи використовують технологію; ведучий (master) – підлеглий або відомий (slave), за
якого тільки один пристрій (ведучий) може ініціювати передачу, тобто зробити
запит. Інші пристрої (підлеглі) передають тому, що веде запрошувані дані або
виробляють запрошувані дії. Майстром мережі може бути ПК, програмований
контролер або прилад, який здатний виконувати цю функцію. Більшість приладів підтримує протоколи Modbus і DCON. Протокол Modbus
(ASCII, RTU). Modbus – стандартний відкритий протокол, який широко застосовується
для організації зв'язку промислового електронного устаткування. Розроблений
компанією ModiCoh, нині підтримується незалежною організацією Modbus-IDA (www.modbus.org). Використовує для передачі даних послідовні лінії
зв'язку RS-485, RS-422, RS-232, а також мережі TCP/IP (рис. 9.2.3). Можливі два режими передачі: ASCII і RTU, які відрізняються способом упаковки повідомлень. Протокол Modbus найзручніший для обміну оперативними даними. Протокол DCON. DCON – відкритий протокол обміну по мережі RS-485, достатньо простій в реалізації. Розроблений
компанією Advantech, застосовується для обміну даними з модулями введення/виводу ADAM, модулями компанії ICP DAS і деякими іншими. Протокол DCON підходить для організації обміну декількома
оперативними параметрами, але за великого об'єму різних даних незручний через
відсутність стандартизації. Інтерфейс USB. Стандарт USB розроблений як альтернатива «повільнішим» комп'ютерним
стандартам RS-232 і LPT. Нині пристрої з інтерфейсом USB 2.0 дозволяють передавати дані з швидкістю до 480
Мбит/с. Інтерфейс USB, як і RS-485,є симетричним і дозволяє
передавати дані по двох проводах (D+ і D-), при цьому логічні рівні аналогічні відповідним рівням стандарту RS-485. Інтерфейс USB має лінії живлення Vcc і GND для живлення підключеного пристрою (за умови, що
споживаний їм струм не перевищує 500 мА). Після установки драйвера операційна система розпізнає пристрій, що
підключається, як СОМ-порт і використовує стандартний асинхронний режим
передачі даних, вживаний для роботи з апаратним СОМ-портом.
Конструктивно
мікроконтролер виконанийі з урахуванням забезпечення надійної роботи в складних
виробничих умовах (вологість, пил, загазованість, вібрації, електромагнітні
перешкоди та ін.). Пристрій введення-виводу мікроконтролера має розвинений
інтерфейс введення (входи електричних сигналів), що дозволяє просто вводити
інформацію з різних датчиків, кнопок, контактів, реле тощо. До того ж за допомогою мікроконтролера легко
включати-відключати різні виконавчі механізми: реле, пускачі, клапани,
заслінки, електродвигуни, електронагрівачі тощо. Мікроконтролери працюють у
реальному часі, тобто прийом і передача управляючих сигналів відбуваються з
швидкодією реального ОУ. Таким чином, мікроконтролер є універсальним пристроєм управління, який
одержує інформацію про стан ОУ (у вигляді електричних сигналів від різних
датчиків) і на основі спеціальної (прикладної) програми формує електричні
сигнали, які за допомогою виконавчих механізмів цілеспрямовано впливають на
ОУ.
·
можливість
програмування послідовності і різноманіття виконуваних функцій, тобто
здібність до роботи за заданою програмою (це основна відмінність
мікропроцесора від класичних елементів напівпровідникової «жорсткої» логіки); ·
використовування
в мікропроцесорних системах цифрового способу представлення інформації,
дозволяє істотно (в порівнянні з аналоговим способом) підвищити
перешкодостійкість створюваних на їх базі пристроїв, а також забезпечити
простоту передачі, перетворення інформації і довготривале її зберігання; ·
застосування
програмного способу обробки інформації, дозволяє створювати уніфіковані
технічні засоби, відмінні практично лише вмістом пристрою, що запам'ятовує, і
специфічними пристроями введення-виводу інформації; ·
компактність,
висока надійність і низька споживана потужність мікропроцесорних засобів,
забезпечуючи можливість розташування управляючих (контролюючих) пристроїв,
створених на їх основі, в безпосередній близькості від керованого
устаткування; ·
низька
вартість мікропроцесорних засобів і високий ступінь їх ефективності. Перераховані переваги мікропроцесорної техніки зумовили її широке
застосування в побутових установках і фермерському устаткуванні.
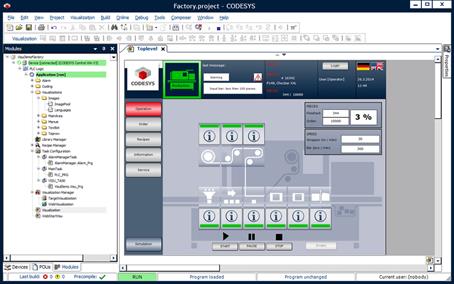
Відмінність ПЛК від контрольно-вимірювальних приладів полягає у відсутності
жорстко прописаного алгоритму роботи. За рахунок цього на ПЛК можна
реалізовувати практично будь-які алгоритми управління, але сам алгоритм
управління має створити безпосередньо користувач контролера. Для створення
алгоритму, його тестування і запису в контролер використовується середовище
програмування (рис. 9.2.5). Для програмування ПЛК використовується середовище програмування CoDeSys v.2.3. Середовище CoDeSys розроблене німецькою компанією 3S-Software для програмування контролерів різних виробників. Так,
за допомогою цього ж середовища програмуються контролери Wago, Beckhoff, ABB. CoDeSys включає наступні основні компоненти: система виконання
та середовище програмування.
· редактор, компілятор і відладчик МЕК-проєктів; ·
підтримку
всіх 5 мов програмування МЕК; ·
засоби
побудови і конфігурації периферійних модулів введення/виводу ПЛК (PLC Configuration); · засоби
створення візуалізації; · засоби комунікацій (мережеві змінні, ОРС-сервер, DDE-сервер).
·
наявність
і тип фізичних входів і виходів контролера; · опис
ресурсів контролера; ·
розташування
даних в МЕК-пам'яті. Дана інформація використовується середовищем програмування CoDeSys під час створення проєкту і завантаження
його в ПЛК. Кожна модель ПЛК має відповідний набір Target-файлів. Перед створенням проєкту необхідно встановити Target-файл, відповідний типу контроллера і прошивці.
Для інсталяції
Target-файлів в середовище програмування CoDeSys використовується програма
InstallTarget, яка встановлюється на ПК разом із середовищем програмування
CoDeSys (рис. 9.2.6). Програми, написані для виконання на ПК і ПЛК,
розрізняються. Виконання програми в ПЛК відбувається циклічно. Це означає, що
протягом заданого інтервалу часу (часу циклу ПЛК) система виконання прочитує
значення з області входів; викликає і один раз виконує необхідну програму (PLC_PRG за замовчанням); пройшовши алгоритм від початку і до
кінця, записує результати його роботи в пам'ять виходів. Потім ці операції повторюються знову. Час циклу ПЛК залежить від об'єму і складності програми ПЛК. Для простої
програми час циклу ПЛК складає 1 мс, для складніших програм воно може
збільшитися. Реальну тривалість циклу можна дызнатись, підключивши модуль Statistic у вікні PLC Configuration. Час опитування датчиків або підключених мережевих пристроїв, а також час
зміни стану виходів не пов'язані напряму з часом циклу ПЛК. Робота з
інтерфейсами, входами і виходами і виконання циклу ПЛК виробляються
паралельно.
На початку кожного циклу своєї роботи ПЛК прочитує значення з пам'яті входів
(позначається %1) і використовує відповідно до призначеного для користувача
алгоритму. У кінці циклу набуті (обчислені) значення записуються в пам'ять
виходів (позначається %Q). Запис значень, одержаних з фізичних входів в область входів, і передача
значень із області виходів на фізичні виходи виробляється паралельно
виконанню циклу ПЛК за допомогою спеціальних внутрішніх драйверів. Залежно від типу ліцензії ПЛК, розмір цієї області пам'яті може бути
обмежений 360 байтами або не обмежений. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||