|
|
|
АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ І СИСТЕМИ АВТОМАТИЧНОГО КЕРУВАННЯ Електронний
посібник |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ
ПРОЦЕСІВ У ТВАРИННИЦТВІ ТА ПТАХІВНИЦТВІ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.7.
Автоматизація збирання яєць та забій
птиці 2.7.1. Автоматизація збирання яєць 2.7.2. Автоматизація процесу забою птиці Механізація та автоматизація збору яєць характерна для кліткового
утримання курей. У кліткових батареях для збирання яєць застосовують стрічкові
конвеєри, а також пересувні лотки. Яйце із гнізда або клітки скочується по
похилій поверхні підніжної решітки в бік конвеєра або пересувного лотка.
Скочується яйце відразу ж після того, як його знесла птиця, на стрічковий
конвеєр. Збирають всі яйця на пересувні лотки під час руху кормороздавача.
Курок-несучок на
великих птахівничих підприємствах утримують в багатоярусних, розміщених у
кілька рядів кліткових батареях. Щоб забезпечити вихід яєць з усіх ярусів і рядів
на загальний приймально – нагромаджувальний стіл, використовують
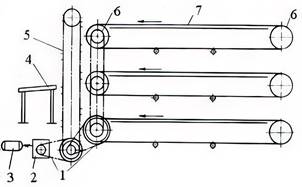
яйцезбиральні конвеєри з елеватором. На рис. 2.7.1 зображено кінематичну схему яйцезбирального механізму, який
складається з трьох яйцезбиральних конвеєрів 7, у кінці яких розміщений елеватор
5. Із кліток яйця викочуються на стрічкові конвеєри, які транспортують їх у
службове приміщення де вони скочуються на полиці-валки елеватора. З полиць
елеватора яйця забирають на приймально-нагромаджувальний стіл спеціальними
гребінками.
Основну
частину свого робочого часу пташниці затрачають на укладання яєць.
Автоматизація укладання дає змогу у 2,5–3 рази збільшити продуктивність праці
у пташнику.
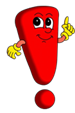
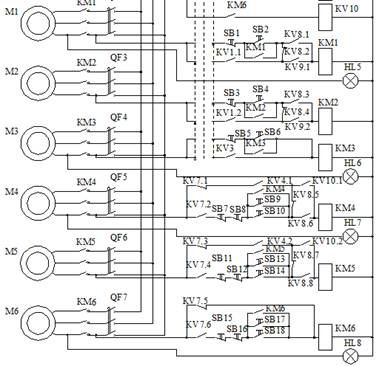
Принципова
електрична схема керування збором яєць у пташнику (рис. 2.7.2) передбачає
роботу в ручному, налагоджувальному й автоматичному режимах. Вибір режиму
здійснюється багатопозиційним перемикачем SA1. Тумблерними
перемикачами SA2–SA7 здійснюється дистанційне вмикання окремих
установок у налагоджувальному режимі, a SA8 – під час ручного керування. Під час вмикання поперечного транспортера М3 магнітним пускачем КМ3 блок-контактами KV1:1 і KV1:2 через KV9.1 та KV9.2 підготовляється вмикання подовжніх
транспортерів першого ярусу M1 і привода щіток очищення стрічок М2. На другому ярусі поперечний
транспортер М4 через реле KV7 зблокований з електроприводом подовжнього
транспортера М6, а через реле
KV10 – з електроприводом очищення щіток М5. Автоматизований
пристрій для сортування яєць, включає механізм подачі, конвеєр з приводом,
виконавчий механізм і систему управління з використанням комп՚ютера.
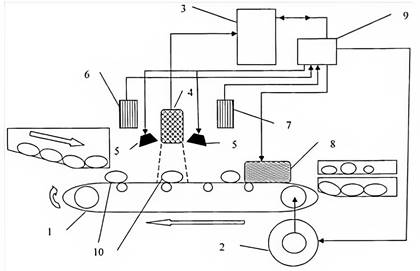
Пристрій
для сортування яєць містить механізм подачі, конвеєр 1 з приводом 2, виконавчий
механізм і систему управління з використанням ЕОМ 3 (рис. 2.7.3). Система
управління складається з встановленої над конвеєром 1 відеокамери 4, з боків
якої розташовані джерела освітлення 5 і фотодатчики 6, 7. Виконавчий механізм
містить поєднанні між собою розподільний пристрій 8, мікроконтролер 9 і комп՚ютер 3. Відеокамера 4 через комп՚ютер 3 і мікроконтролер 9 поєднана з розподільним
пристроєм 8, а фотодатчики 6, 7 і джерела освітлення 5 з'єднані з входом
мікроконтролера 9, вихід якого з'єднаний з приводом 2 конвеєра 1, на якому
розташовані яйця 10.
Пристрій для
сортування яєць працює наступним чином: під час запуску лінії включаються джерела освітлення 5
робочої зони сканування, запускається блок управління за допомогою приводу 2
з малою швидкістю. Двигун обертає конвеєр 1 до тих пір, поки зафіксований
фотодатчиком 6 об'єкт, знаходиться на поверхні конвеєра 1, потім відбувається
фіксація зображення відеокамерою 4. Після цього бінарне зображення
відправляється і розпізнає блок ЕОМ 3, який обробляє його за заданими
геометричними параметрами, довжиною і шириною. Залежно від
спрацьовування програми комп՚ютера 3, автоматично відбувається відбраковування яєць
розподільним пристроєм 8. Імпульси з фотодатчиків 6, 7 надходять по черзі і
фіксуються в мікроконтролері 9. У разі припинення подачі яєць, фотодатчики 6,
7 перестають подавати сигнали, після чого відбувається вимкнення всієї
системи. Автоматизована
установка дозволить збільшити надійність роботи пристрою з визначення якості
яєць і зменшити при цьому їх бій. Автоматизовану
систему для визначення якості яєць і їх сортування з використанням програмо-логічних контролерів зображено
на рис. 2.7.4. Принцип роботи установки заснований на цифровій обробці
відеозображення з визначенням геометричних характеристик яєць. Програму
обробки розроблено в середовищі «LabWIEW».
Рис. 2.7.4. Схема сортування яєць
з використанням програмно-логічного контролера У системі використовуються засоби автоматизації ОВЕН:
програмований контролер ПЛК110-60, частотний перетворювач ПЧВ101-К75-В,
панель оператора СП270, а також індуктивні датчики PR12-4DP. Програмне забезпечення для контролера розроблено в
середовищі CODESYS. На ПК встановлена SCADA-система, з якою ПЛК110 по Ethernet веде обмін даними. Панель оператора СП270, встановлена
на конвеєрі, має всі необхідні засоби для управління установкою і
налаштуванням параметрів для сортування яєць. Для налагодження
розроблено сервісне програмне забезпечення, призначене для налаштування
установки і пусконалагодження. Експрес-метод визначення розмірів і форми з
використанням інформаційних технологій дозволяє проводити якісний відбір яєць
і підвищує продуктивність праці в кілька разів.
Для забою птиці й обробки тушок до товарних кондицій сучасні спеціалізовані
птахівничі господарства мають забійні цехи, обладнані напівавтоматичними
забійними лініями (рис. 2.7.5). Птахів, доставлених із пташників у клітках,
підвішують за ноги закрепами на ланцюзі підвісного конвеєра, що рухається
повільно зі швидкістю 0,08 м/с убік робочого місця забою і
знекровлювання.
Запускають забійну лінію з центрального пульта
керування. Послідовність включення в роботу окремих
машин здійснюється багатоканальним програмним пристроєм. Забійна лінія В2-ФЦЛ-3
використовується для переробки бройлерів, курей та курчат. Цех призначений для обслуговування бройлерних птахофабрик
потужністю 1 млн голів на рік, а також великих птахофабрик яєчного напрямку,
племптахозаводів. Продуктивність
цеху – 3000 гол./год. з випуском м'яса птиці в і
готовому вигляді, супових наборів із ніжок та голів, кісткового борошна та
пір'я.
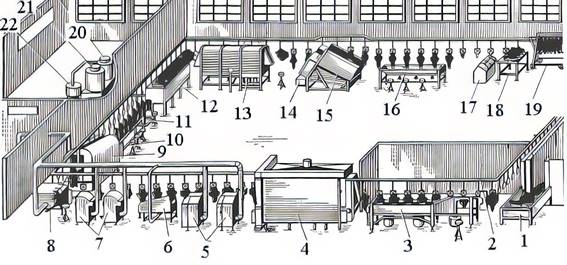
Рис. 2.7.5. Технологічна схема напівавтоматичної лінії
забою птиці: 1 – загін для птахів; 2 –
підвісний конвеєр; 3 – жолоба для забою і
знекровлювання; 4 – камера для теплової обробки тушок; 5,6,7, 8 – машини для
видалення пір’я; 9 – автоматична машина для видалення пуху з тушки; 10 – стіл
для збору залишків пера під час ручної обробки тушок; 11 – стіл для обробки
тушок; 12 – ванна для автоматичного воскування тушок; 13 – охолоджувач для
воскованих тушок; 14 – візок для збору і транспортування воскової маси; 15 –
автоматична машина для зняття воскового покрову з тушок; 16 – стіл для збору
залишків воскової маси під час ручної обробки тушок; 17 – машина для миття
лапок; 18 – машина для упакування тушок; 19 – візок для транспортування
тушок; 20 – бак розплавленої воскової маси; 21 – бак для регенерації воскової
маси; 22 – центрифуга для відділення воскової маси Для збереження птиці у забійному цеху передбачені
чотири універсальні холодильні камери на 240 т.
·
ділянка
транспортування птиці до місця її підвішування на конвеєрі; ·
лінія
забою птиці та первинної обробки тушок; · лінія
обробки тушок; ·
лінія
охолодження тушок та харчових субпродуктів; ·
лінія
запаковування внутрішніх органів у поліетиленову плівку; ·
ділянка
сортування, фасування та запаковування тушок у пакети з поліетиленової
плівки; ·
ділянка
переробки відходів тваринницького походження на кормове борошно.
Пристрій для санітарної обробки К7-ФО-2-Л6 призначений для очищення
та дезінфекції всіх рухомих елементів конвеєра. Його встановлюють перед
ділянкою підвішування живої птиці. Цей механізм, який складається з двох
щіток, що обертаються, розташовані на відкритих стінках. Апарат електроглушіння
РЗ-ФЗО призначений для анестизування живої птиці електричним струмом під час її
руху на конвеєрі. У вигляді контактного електроду в ньому використовують
воду, яка знаходиться в ізольованому об'ємі. Апарат складається із стояка,
ванни, контактної напрямної лебідки для регулювання висоти встановлення ванни
та електричного блока. Птиця,
занурюючись з головою у воду, до якої підведений
електричний контакт, замкне електричне коло вода–напрямна (другий електрод),
під дією струму впадає в шоковий стан, що полегшує подальший забій. Наявність
води забезпечує надійний контакт та дозволяє значно знизити робочу напругу
струму, потрібну для глушіння птиці. Пропускна здатність апарату для
бройлерів, курей та курчат до 6000 гол./год, а для
каченят та качок 2000 гол./год. Діючу напругу електричного струму можна
змінювати в межах 15–220 В, габаритні розміри установки
1350×950×2200 мм, маса Машина для зовнішнього забою В2-ФЦЛ-6/4 складається із
каркасу, регульованого за висотою стояка, привода, дискового ножа, двох
напрямних та двох підпружинених важелів. Лічильник птиці В2-ФЦЛ-6/66 складається із
системи важелів та напрямних, змонтованих на металевій рамці, та ящика, який
виноситься за межі забійного цеху. На
рамі кріпиться клемна коробка та дві направляючі, до однієї з яких кріплять
датчики з вимикачем, важелем та противагою. Машина для зняття
пір'я К7-ФЦЛ/7 складається з двох панелей, двох опорних рам,
зрошувальної системи та системи важелів. Кожна панель – це каркас, зварений з
листів та стяжок. На одному з листів кожного каркасу, який також є передньою
стінкою, змонтовані три ряди ротодисків (по сім вузлів у
кожному ряду). Всі ротодиски обладнанні рифленими гумовими робочими
органами (формовими виробами) – пальцям. Верхній та нижній ряд ротодисків
зроблені з нахилом. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||