|
|
|
АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ
ПРОЦЕСІВ І СИСТЕМИ АВТОМАТИЧНОГО
КЕРУВАННЯ Електронний посібник |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1. ОСНОВИ АВТОМАТИЗАЦІЇ СІЛЬСЬКОГОСПОДАРСЬКОГО ВИРОБНИЦТВА |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1.2.1. Особливості автоматизації
сільськогосподарського виробництва 1.2.2. Технічна база для автоматизації сільськогосподарського
виробництва 1.2.3. Основні задачі автоматизації
технологічних процесів 1.2.4. Класифікація процесів і об'єктів
автоматизації сільськогосподарського виробництва 1.2.5. Загальні відомості про сільськогосподарські технологічні процеси 1.2.6. Технологічні вимоги при розробці систем
автоматичного керування 1.2.7. Технологічні установки як об'єкти
автоматизації 1.2.8. Вихідна інформація про технологічні
процеси як об'єкти керування Автоматизація сільського господарства спирається на багатий досвід
промисловості. До методів і засобів автоматизації, які застосовуються у
тваринництві і рослинництві, ставляться специфічні вимоги, обумовлені
характерними рисами сільськогосподарського виробництва.
Виробничі процеси в
сільському господарстві складні і різноманітні, мають значний обсяг
технологічної інформації і тісний взаємозв'язок.
Це обумовлює велику різноманітність технологічних процесів, що історично склалися
в період використання живої тяглової сили і які знаходяться в стадії
незавершеної перебудови на потокове машинне виробництво, а також велику
кількість типів, конструкцій, характеристик і режимів роботи
сільськогосподарських машин і установок, багато з яких далеко не завжди
пристосовані для застосування на них навіть найпростіших пристроїв
автоматики. Система сільськогосподарських машин має до десяти тисяч найменувань за
типами, майже 60% з яких призначені для рільництва і близько 30% – для
тваринництва і птахівництва.
У цих умовах автоматика має працювати дуже надійно,
тому що такий процес не можна перервати і практично неможливо надолужити упущене
шляхом інтенсифікації наступного періоду. Наприклад, автоматика у
тваринництві має забезпечити, циклічність виконання технологічних операцій
упродовж доби незалежно від погодних умов. Збурюючі впливи, що діють на об'єкти, мають високий ступінь
неоднорідності і випадковості із широкою зміною своїх величин. Багато
автоматизованих сільськогосподарських об'єктів мають контрольовані і
регульовані параметри, розподілені як по технологічному полю або навіть
більшому об’єму, так і в часі. Наприклад, у нагрівальних установках і
сушарках, зерносховищах і овочесховищах, теплицях і тваринницьких приміщеннях
необхідно по всьому об'єкту контролювати параметри (температуру, вологість,
газовий склад, освітлення тощо) і керувати ними. Для таких об'єктів системи автоматики повинні мати
оптимальну кількість первинних перетворювачів і виконавчих органів і в той же
час забезпечувати керування параметрами у всіх розосереджених зонах із
заданою точністю і надійністю.
Унаслідок перерахованих особливостей і низку інших причин методи і засоби
автоматизації і вимоги до них у сільському господарстві значно відрізняються
від промислових. Розробляючи пристрої автоматики сільськогосподарських
установок, необхідно розраховувати на широкі межі зміни параметрів довкілля.
Це дозволить одержати високонадійні засоби, тому що найефективнішим
заходом боротьби за підвищення надійності пристроїв автоматики є вибір
елементів з малою інтенсивністю відмов і різні способи збільшення надійності
під час проєктування. Зазначені специфічні особливості в
першу чергу впливають на первинні перетворювачі і виконавчі органи
автоматики, що встановлюються безпосередньо на машинах, на які впливають всі
несприятливі умови довкілля. Інші вузли автоматики можна розташовувати в
окремих приміщеннях чи спеціальних шафах, що виключають несприятливу дію
довкілля.
Сільське господарство
тісно пов'язано з усіма галузями країни, воно поставляє іншим галузям 66%
своєї продукції і споживає близько 60% засобів виробництва, що надходять з
галузей, що забезпечують його роботу.
На
село надходить усе більше сучасних високопродуктивних машин, що створюються
відповідно до єдиної системи машин із комплексної механізації
сільськогосподарського виробництва, з урахуванням передового вітчизняного і
закордонного досвіду. Освоюється випуск моделей нових сільськогосподарських машин і інших
технічних засобів, що відрізняються високими техніко-економічними
показниками. Особлива увага приділяється випуску устаткування для
тваринницьких і птахівничих комплексів. Нові комплекти машин в основному забезпечать комплексну
механізацію й автоматизацію всіх процесів на комплексах із виробництва м'яса
птахів, яєць, яловичини і свинини. На фермах великої рогатої худоби комплексною механізацією охоплено 60%
виробничих процесів, у свинарстві – 70%, у птахівництві – понад 85%.
Завершується комплексна механізація рільництва, машинно-тракторний парк
нараховує величезну кількість тракторів, автомобілів, зернових комбайнів. Останні досягнення науки і техніки дозволяють поступово переходити від
простого машинного сільськогосподарського виробництв до комплексно
механізованого й автоматизованого. Оптимізація умов вирощування рослин,
утримання і годівлі тварин за допомогою засобів автоматики розширює
біологічні можливості збільшення виробництва продукції. Автоматизація сільськогосподарського виробництва має не тільки
техніко-економічне, але і велике соціально-політичне значення.
• постійне
вдосконалення сільськогосподарських технологічних процесів у напрямку їхнього
переводу з періодичних переривчастих у безупинні зі сполученим чи незалежним
транспортним рухом; • наукове
узагальнення світового досвіду автоматизації сільського господарства,
встановлення оптимального обсягу і черговості автоматизації технологічних
процесів, виявлення типових рішень і їхніх аналогів у промисловості для
розумного використання серійної апаратури автоматики, безупинне
удосконалювання методів автоматизації й алгоритмів керування; • визначення
статичних і динамічних характеристик сільськогосподарських об'єктів
автоматизації, математичний опис об'єктів керування (моделювання); • вивчення і
встановлення функціональних залежностей між контрольованими параметрами
сільськогосподарської продукції і її фізичними властивостями (електричними,
оптичними акустичними, тепловими, механічними тощо) з метою їхнього
використання для побудови вимірювальних перетворювачів специфічних для
сільського господарства неелектричних величин; • розробка нових
агрегатів і установок системи машин для сільського господарства з урахуванням
вимог і можливості їхньої автоматизації; • удосконалювання
методів оптимального проєктування і розрахунку засобів автоматики з
урахуванням розширення їхніх функціональних завдань і підвищення апаратної й
експлуатаційної надійності.
Великі завдання стоять в області механізації й
автоматизації ручної праці. Майже 50% операцій у сільському господарстві
виконується з застосуванням ручної праці. У системі машин для сільського
господарства передбачено механізувати й автоматизувати близько 300 операцій,
що виконуються вручну. Істотне скорочення ручної праці забезпечує застосування маніпуляторів і
промислових роботів (рис.1.2.5). Маніпулятор – це окремий
механізм, що виконує під керуванням оператора дії (маніпуляції) аналогічні
діям рук людини.
Промисловий робот – це автоматично програмно-керований маніпулятор.
Промислові роботи знаменують собою якісно нову ступінь у розвитку
автоматизації промислового і сільськогосподарського виробництва, істотно
змінюють роль людини у виробничому процесі. Від традиційних автоматичних
систем вони відрізняються тим, що здатні виконувати за людину універсальні
ручні операції зі складними просторовими переміщеннями. З упровадженням маніпуляторів і роботів змінюється вся організація
технологічного процесу, оскільки багато ручних операцій за існуючої
технології неможливо автоматизувати традиційними засобами. Тільки з уведенням роботів у технологічний процес вдається цілком усунути
стомлюючу і часто небезпечну ручну працю.
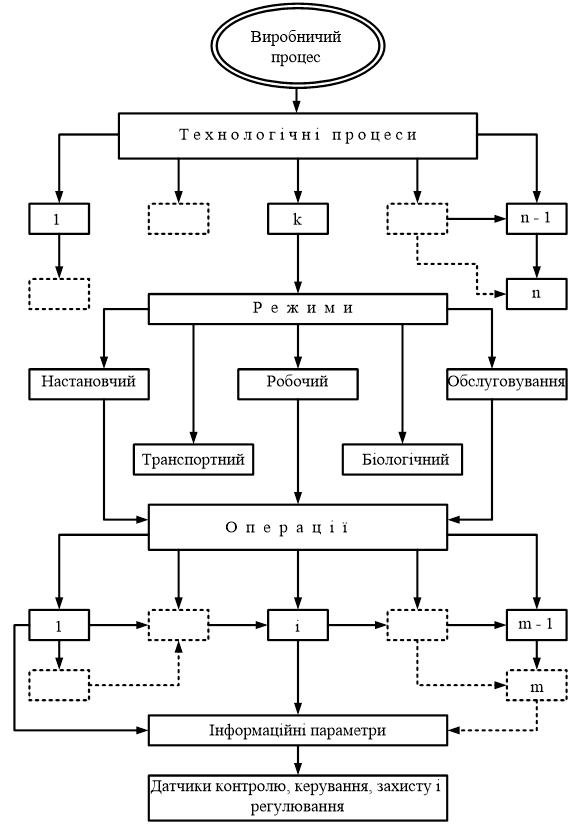
На рис. 1.2.7 наведено функціональну схему автоматизованого виробничого процесу,
на якій показано місце і взаємозв'язок технологічних процесів, їхніх режимів,
операцій з датчиками інформаційних параметрів. Виробничі
процеси поділяють за
відмітними ознаками галузевої приналежності, наприклад, процес оброблення і
збирання зернових культур, післязбиральної обробки зерна, збереження овочів,
відгодівлі тварин і одержання від них продукції.
Технологічний процес характеризується режимами функціонування: • настановчим,
зв'язаним з підготовкою машин і об'єктів до виконання їхніх основних функцій; • робочим,
обумовленим взаємодією
об'єкта чи машини з
матеріалом чи робочим середовищем; • біологічним (чи
фізико-хімічним), пов'язаним із тривалим природним процесом нагромадження
усередині об'єкта рослинної чи тваринницької
продукції; • транспортним
режимом, що включає переміщення машин, робочих органів, тварин чи матеріалу; • режимом
обслуговування є, наприклад, технічний догляд за машиною, обслуговування
тварин і агротехнічне забезпечення життєдіяльності рослин.
У сільськогосподарському виробництві найспецифічнішими є біологічні
режими, для яких характерна безперервність фізіологічних процесів утворення
продукції і циклічність її одержання. Такий процес не можна перервати і
практично неможливо надолужити упущене шляхом інтенсифікації наступного
періоду. Незважаючи на специфічність і різноманітність біологічних режимів,
завдання автоматизації їх у сільському господарстві залишається незмінною:
забезпечити хід фізіологічних процесів таким чином, щоб у найкоротший термін
за мінімальних витрат праці одержати найбільшу кількість продукції кращої
якості.
Контроль і керування режимами й операціями здійснюються за інформаційними
параметрами, вимірюваними первинними перетворювачами різних датчиків. Операції виконуються одночасно (паралельно) чи послідовно. Контроль
виконання всіх операцій не обов'язковий. Контролюються тільки основні
операції і режими, що характеризують у цілому якісно і кількісно виконання
виробничого процесу.
Рис. 1.2.9. Функціональна схема
автоматизованого виробничого процесу Класифікація об'єктів під час розширення робіт з автоматизації
сільськогосподарських технологічних процесів і операцій полегшує визначення
обсягу і черговості автоматизації, розробку типових рішень в області
технології автоматизованого потокового виробництва і створення технічних
засобів автоматики. У класифікацію мають входити не тільки існуючі процеси й
об'єкти автоматизації, але і ті, котрі можуть бути запропоновані надалі.
Без наукової
класифікації сільськогосподарських об'єктів і процесів у них неможливі широкі
теоретичні узагальнення, техніко-економічні порівняння і практичні оцінки.
• типому технологічних процесів; • взаємозв'язком
технологічного і транспортного руху; • видом
технологічного циклу; • динамічними властивостями об'єкта; • за агрегатним
станом оброблюваного матеріалу. Класифікація
за типом технологічних процесів дає можливість розробити загальний підхід до
вирішення завдання автоматизації всього класу, незважаючи на технологічну
специфіку. Доречно підкреслити, що наведений розподіл технологічних процесів
на механічні, теплові, електричні, біологічні, хімічні і гідравлічні відбиває
основне визначальне явище в об'єкті, у якому можуть протікати одночасно й
інші процеси, що відіграють другорядну роль.
За
взаємозв'язком технологічного і транспортного рухів об'єкти поділяються на три класи: з несполученим,
сполученим і незалежним рухом. В об'єктах з несполученим рухом одні установки
призначені тільки для транспортування матеріалу без його обробки, а інші –
здійснюють його технологічну обробку. Ці об'єкти варто віднести до нижчого
класу з погляду економічної ефективності автоматизації. До більш високого
класу відносяться об'єкти, у яких транспортний і технологічний рух сполучені
і знаходяться в тісному взаємозв'язку: обробка чи переробка матеріалів
відбувається під час їхнього транспортування. Для цього класу установок автоматизація
дозволяє істотно підвищити їхню продуктивність і забезпечити оптимальний
режим роботи. Об'єкти вищого класу мають незалежний рух. Транспортний рух може бути
зроблено ними під час обробки, а технологічний – під час транспортування.
Автоматизація цього класу об'єктів забезпечує безперервність виробничого
процесу і найбільшу продуктивність. Агрегатний
стан оброблюваного
матеріалу впливає на вибір виконавчих і первинних перетворювачів систем
автоматики. Агрегатний стан матеріалу на вході в об'єкт може відрізнятися
докорінно від стану на виході з об'єкта. Це властивість необхідно враховувати
під час розробки технічних засобів автоматики сільськогосподарського
призначення. Автоматизації легше піддаються об'єкти з безупинним
технологічним циклом і трохи складніше – з періодичними
процесами, що особливо не мають самовирівнювання. В об'єктів із
самовирівнюванням відхилення між заданим і дійсним значеннями керованого
параметра зростає дуже повільно завдяки зміні будь-якого іншого параметра,
наприклад, за відмови повітряних калориферів у системі регулювання
температури повітря в теплиці температура знижується повільно за рахунок
переходу теплоти від ґрунту до повітря. Проміжні ємності так само, як і
самовирівнювання, сприяють поліпшенню автоматичного керування процесом. Для автоматичного керування об'єктом важливо знати його динамічні властивості, що істотно впливають на стійкість і
якість регулювання. За динамічними властивостями сільськогосподарські об'єкти
автоматизації можна розділити на сім основних типів. У міру розвитку рівня сільськогосподарського виробництва кількість
технологічних процесів і операцій, а також засобів контролю і керування
неухильно росте. Тому необхідно постійно удосконалювати і розширювати
класифікацію сільськогосподарських об'єктів з урахуванням особливостей і
вимог автоматизації. Класифікація маєа сприяти виробленню загальних вимог до технічних
засобів, вибору раціональних принципів побудови систем і засобів автоматики, розробці
загальних показників і методів визначення техніко-економічної ефективності
автоматизації. До технологічних процесів відносяться процеси й об'єкти в структурній
системі матеріального виробництва, що мають безпосереднє відношення до
утворення (формування), збереження чи переміщення виробленої продукції.
Одиничний вплив, що призводить до зміни форми, структури, складу або
стану предмета виробництва, називається технологічною
операцією, а вплив, що викликає зміну просторового положення предмета
виробництва, – транспортною операцією. Технологічні процеси й операції іноді
узагальнено називають технологічним
рухом, а операції з переміщення речовини – транспортним рухом. У сучасному сільськогосподарському виробництві цьому загальному
визначенню цілком відповідає технологічний рух, що відноситься до допоміжного
і підсобного виробництва. Це процеси кормоприготування, первинної обробки чи
переробки продукції, збирання й утилізації екскрементів, видобуток й обробка
води, виробництва і розподілу теплового й іншого видів енергії тощо. Відмінна риса основного сільськогосподарського виробництва полягає в
тому, що в утворенні продукції (приросту, приплоду) обов'язково беруть участь
різні види сільськогосподарських рослин, продуктивних тварин, птахів.
Сільськогосподарські технологічні об'єкти включають, як правило, у свою структуру продуктивні рослини чи тварини разом з
виробничими приміщеннями. Технологія виробництва поєднує набір процесів і операцій, необхідних для одержання завершеного,
готового до реалізації продукту, а також визначає загальні принципи, способи
і режими здійснення впливів. Так, технологія виробництва молока визначає
способи утримання корів (прив’язний чи безприв’язний) і годівлі
(гранульованими повноцінними кормами чи вологими сумішами), а також режими
годівлі (дво- чи триразове).
Технологія виробництва постійно удосконалюється. Новітня технологія
найбільше повно використовує наявний на даний момент науково-технічний
потенціал і передовий досвід, забезпечує високу економічну ефективність,
кількісні і якісні показники виробництва. У зв'язку з тим, що сільське господарство характеризується різноманіттям
галузей виробництва і розмаїтістю технологічних процесів, розробка оптимального
технологічного процесу в кожному конкретному випадку є дуже складним
завданням. Розвиток уніфікованих процесів сільськогосподарського виробництва
сприяє успіху розробки оптимальних, придатних для автоматизації технологічних
процесів. Тому дуже актуальною, особливо в умовах переводу сільського
господарства на промислову основу, є проблема типізації, універсалізації і
навіть стандартизації сільськогосподарських технологічних процесів і техніки. Перехід сільського господарства на промислову основу тісно пов'язаний із
процесами концентрації й інтенсифікації виробництва. У цих умовах, коли поряд
з великими потоками сировини, енергії, праці йде великий потік взаємозалежної
інформації, точне і правильне осмислювання цієї інформації, прийняття
відповідних оптимальних рішень і взагалі повноцінне керування виробництвом,
можливі тільки під час використання методів і засобів автоматизації. Однак
застосування досягнень автоматизації вимагає певної технологічної підготовки
виробничих процесів.
• розробки нових
технологічних процесів і типізації їх; • створення
технологічного устаткування, що забезпечує якісне виконання типізованого
технологічного процесу; • вироблення
алгоритмів ефективного керування технологічними процесами, операціями й
устаткуванням за допомогою технічних засобів автоматики.
Типізацію технологічного процесу в сільськогосподарському виробництві
доцільно починати зі складання так званого технологічного ланцюжка. Технологічний ланцюжок відображає взаємозв'язок технологічних процесів, окремих операцій і
режимів машин, що беруть участь у їхньому виконанні. Наприклад, технологічний
ланцюжок післязбиральної обробки зерна в потоці включає наступні операції:
доставку зерна від комбайна, зважування зерна, його розвантаження,
транспортування норією, первинне очищення від великих домішок на
повітрорешітних машинах, транспортування норією, сушіння, охолодження,
транспортування норією, вторинне очищення від дрібних домішок,
транспортування шнеком, сортування на трієрах, збір у
бункер, зважування, транспортування на склад, зважування і
складування.
Технологічний ланцюжок дозволяє виявити порядок дії машин відповідно до
вимог процесу, обсяг робіт з операцій, необхідну кількість машин, установити
оптимальне агрегатування і припустимий ступінь типізації технологічних
процесів. Таким чином, технологічний ланцюжок дає можливість глибоко
проникнути в саму технологію процесу у всіх його аспектах. Приступаючи до розробки систем автоматичного керування, розроблювач має
вивчити об'єкт автоматизації, цілком усвідомити всі можливі режими роботи. Варто мати на увазі, що розробляти автоматичні системи керування об'єктом
часто приходиться для виробництва різних рівнів розвитку. У зв'язку з цим
ступінь автоматизації і сукупність операції і режимів обумовлені рівнем
розвитку самого виробництва.
1. Які ціль і завдання системи автоматичного керування? 2. Які блоки складають об'єкт керування? 3. Які функціональні і керуючі зв'язки маються між блоками, що визначають
майбутню систему? 4. Які режими об'єкта керування і його блоків і скільки технологічно
припустимих переходів між цими режимами? 5. Якими конкретними алгоритмами описується той чи інший режим? 6. Які датчики і виконавчі елементи можуть бути застосовані для даної
системи? 7. Які математичні рівняння описують взаємодію керуючих сигналів і
сигналів збурення, що характеризують той чи інший режим роботи систем? Після аналізу технологічних процесів чи окремих операцій необхідно
установити весь обсяг інформаційних параметрів, що характеризують технологію
і всі їх взаємозв'язки. Накопичена відповідно до поставлених питань інформація має бути
відображена в компактній і зручній для подальшої роботи формі. Саме це дає
можливість виявити перелік інформаційних параметрів. Класифікація інформаційних параметрів і технологічний ланцюжок дозволяють
скласти структурну схему системи керування, що є сукупнісю об'єкта керування
і керуючого пристрою. Варто мати на увазі, що неповна і неточна обробка всієї інформації
призводить до її перекручування на наступних рівнях, до запізнювання в
прийнятті рішень і заходів для узгодження дій установок, потокових ліній,
цехів і в підсумку до збільшення витрат на виробництво, зниження
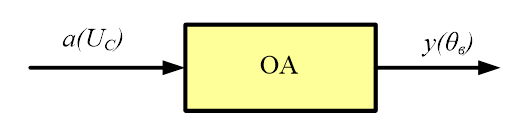
рентабельності, псування продукції тощо. Найпростіші об'єкти автоматизації мають одну вихідну величину і відповідно один вхідний вплив.
Наприклад, у водонагрівача-термоса вихідною величиною (параметром) є
температура води, а регулювальним впливом – електрична напруга, подавана на
електронагрівників (рис. 1.2.13).
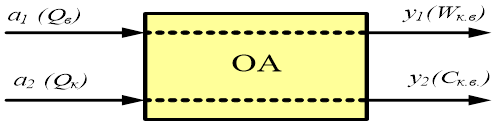
До простих можна віднести також технологічні установки з декількома
вхідними і вихідними координатами, якщо між цими координатами не існує
функціональних взаємозв’язків. Такий об'єкт можна розглядати як декілька найпростіших
за відповідними параметрами і каналами вхідних впливів. Наприклад, у свинарниках під час змішування комбікорму з водою й
іншими добавками цілком допустимо процеси заповнення змішувача водою,
комбікормом тощо розглядати роздільно (рис. 1.2.14).
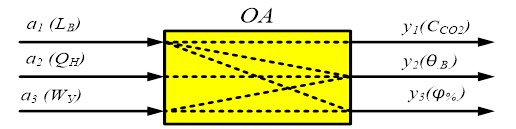
І, нарешті, складні
об'єкти з декількома взаємозалежними структурами вхідних і вихідних
координат вимагають обліку взаємного впливу суміжних впливів і параметрів.
Наприклад, під час регулювання мікроклімату вентиляція впливає не тільки на
концентрацію газів СО2, NH3, Н2S у приміщенні, але і на температуру та вологість, у
свою чергу, випаровування підвищує вологість і знижує температуру (рис.
1.2.15)
За невеликої кількості взаємозалежних координат звичайно вдається
встановити головні для цього процесу параметри, яким варто віддати перевагу в
процесі регулювання, тоді інші можна розглядати як другорядні (залежні). Однак у сучасному сільськогосподарському виробництві багато технологічних
об'єктів, набагато більш складних за структурою взаємозв'язків. Наприклад,
пташник із птахами являє собою об'єкт із безліччю вихідних координат (якими є
параметри мікроклімату, годівлі і освітлення, збирання посліду і яєць, поїння
і санітарного стану) і цілим поруч керованих впливів із обслуговування
поголів'я птахів, тобто вхідними координатами. Між цими координатами
існують визначені зв'язки і взаємозалежності.
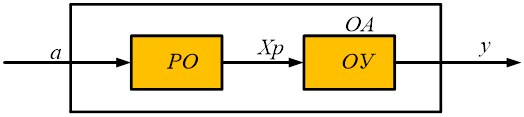
Усі розглянуті об'єкти автоматизації мають
складну внутрішню структуру і можуть бути представлені низкою елементарних
функціональних ланок, певним чином з'єднаних між собою. У найпростішому
випадку в структурі об'єкта автоматизації можна виділити об'єкт керування ОУ – технологічний процес, розглянутий
ізольовано, і регулювальний орган РО
– пристрій, що забезпечує цілеспрямований вплив на об'єкт керування (рис.
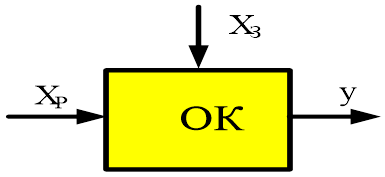
1.2.16). Об'єкти керування (рис. 1.2.17) характеризуються трьома узагальненими координатами. Перша координата – вихідна величина y, чи параметр процесу, що характеризує наявність в
об'єкті речовини, або його енергетичний потенціал. Друга координата – збурення ХЗ
– це сумарний (результуючий) потік речовини чи енергії, обумовлений ходом
процесу (навантаження) і впливом середовища (перешкоди ).
І нарешті, третя координата –
регулювальний вхідний вплив ХР
– величина штучно утвореного впливу, покликаного компенсувати дію збурення і
забезпечити нормальне функціонування процесу. Щоб об'єкт знаходився в
рівновазі, має бути дотримана умова ХР
= ХЗ чи ХР –
ХЗ =0. Наявність Δх= ХР – ХЗ дозволяє повертати об'єкт до оптимального значення
параметра після його природного відхилення.
Регулювальний вхідний вплив на об'єкт ХР
одночасно є вихідною координатою регулювального органа РО, входом якого служить вплив, що прикладається до нього під час
ручного керування, – відкриття заслінок чи засувок, подача електричної
напруги на електроприводи, електротеплові чи освітлювальні установки,
ввімкнення швидкостей, муфт, трансмісій тощо. Наявність регулювального органа – неодмінна умова і вимога керованості технологічного
об'єкта. Як приклад можна розглянути камеру інкубатора як об'єкт регулювання
вологості повітря. Об'єкт керування в ній – повітряне середовище всередині
камери, регулювальний орган – клапан подачі води на зволожувач, параметр –
відносна вологість повітря, збурення – викид вологи з вентиляційним повітрям,
що регулює ручний вплив – подача напруги на соленоїд електроклапана. Взаємозв'язок між узагальненими координатами об'єктів
керування виражається статичними і динамічними характеристиками. Статична
характеристика об'єктів керування – це залежність між вихідною
координатою (параметром процесу) і результуючим значенням вхідної
координати – впливом за сталих режимів, тобто функцією.
•
дані про ємності об'єктів автоматизації і зв'язках між ними; • вимоги до показників якості (параметрів)
технологічних процесів; • значення, інтенсивність зміни в часі і місце
прикладання збурювання; • значення регулювального впливу і передатні властивості
регулювальних органів. Кожна ділянка, де
може накопичуватися речовина чи енергія в об'єкті (ємність), має бути
охарактеризована окремо і мають бути представлені дані про з'єднання між
всіма ємностями: опору потоків, характеристика пружних елементів тощо. Ці зведення можуть
бути представлені максимальними, мінімальними чи усередненими значеннями
самих потоків чи залежностями, що їх характеризують, а також імовірністю
сполучення різних факторів. Наприклад,
тепловий потік від тварин може бути визначений у розрахунку на одиницю маси
тварин, а потік теплоти через огородження – за допомогою розрахункового
значення температури зовнішнього середовища. В одноємних
об'єктах збурювання можуть бути прикладені на стороні \подачі чи витрати, у
багатоємних – до різних сторін, а в об'єктах з розосередженими параметрами –
до певних ділянок. Відомості про
регулювальні органи, через які здійснюється регулювальний вплив на об'єкт
керування, беруть з паспортних даних пристроїв, що здійснюють ці впливи. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||