|
|
|
|
2.4. Контрольно-вимірювальна апаратура
|
|
|
|
|
|
|
|
Датчики
гідростатичного тиску серії 3051
|
|
Призначення
|
|
Датчики тиску 3051S Super
Modulе (супермодуль) використовуються для високоточних технологічних
процесів і комерційного обліку дорогих продуктів, оскільки вони мають
мінімальні додаткові похибки, викликані впливами зміни температури
навколишнього середовища і статичного тиску.
|
Технічні характеристики.
Верхні
межі діапазонів вимірювань – від 13,8 до 68,9 МПа.
Переналаштування діапазонів 200:1,
100:1. Вихідні сигнали: 4–20 мА, HART, Foundation Fieldbus, Prolibus.
Температура навколишнього
середовища – від мінус 40 до плюс 85˚С.
Температура середовища, що
вимірюється, – від мінус 40 до плюс 149˚С.
Звичайне і вибухозахищене
виконання.
|
|
|
Додатково: РК-індикатор (зокрема
дистанційного монтажу), кронштейни, вентильні блоки, фланцеві адаптери,
виносні мембрани тощо.
Побудова датчиків тиску з
використанням герметично ізольованої від дії зовнішніх чинників платформи
супермодуля, технології Saturn™ (для зменшення впливу статичного тиску),
дозволила забезпечити точність і стабільність вимірювань.
Серія датчиків тиску 3051S має
значення основної наведеної похибки -0,04% (варіант Ultra),
-0,065% (варіант Classic), що по-в'язане із
застосуванням конструкції Super Module. Технологія Saturn™ дозволяє
оптимізувати характеристики і розширити можливості перетворювача тиску.
|
|
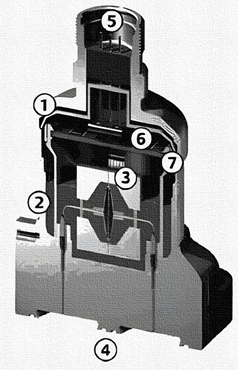
Рис. 2.20. Будова super module 1, 2 - суцільнозварна, герметична
конструкція корпусу датчика з нержавіючої сталі 316L. Захищає електроніку
від пилу, вологи і шкідливих домішок (ступінь захисту IP68). 3 – ємнісна
чарунка, виконана за сенсорною технологією Saturn™ (рис. 2.21). 4 - чутливі розподілові мембрани
платформи Coplanar™ ізолюють технологічний процес. Мембрани виконані з
різних матеріалів, зокрема зі сплавів для роботи в агресивних середовищах.
Додатково датчик комплектується фланцевим з'єднанням, вентильним блоком,
вбудованою діафрагмою, розподільною мембраною, що дає закінчене, інженерне
рішення. 5 – штепсельний роз'єм. Цифрові вихідні сигнали 4-20 мА з
HART-протоколом, Foundation fieldbus. Функціональні можливості PlantWeb. 6,
7 - одна монтажна плата.
|
Високоінтегрована конструкція
підвищує характеристики, надійність, час відгуку за рахунок зменшення
кількості деталей і механічних з'єднань.
|
|
|
|
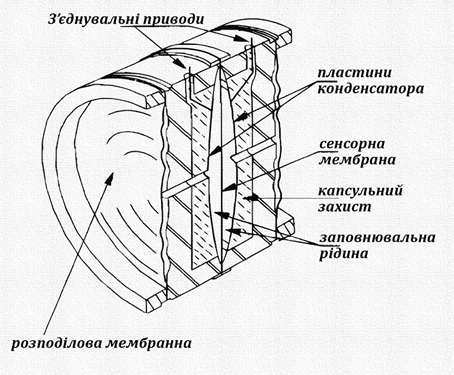
Рис. 2.21. Будова ємнісної чарунки, виконаної за сенсорною технологією
Saturn™
|
Вимірювані середовища: газ, рідина, пара, агресивні
середовища.
|
|
Діапазони верхніх меж вимірювань, кПа:
|
|
– абсолютний тиск 1,15...68900;
– надмірний тиск 0,012... 13800;
– перепад тиску 0,025...13800;
– гідростатичний тиск (рівень)
0,62...2070.
|
Переналаштування діапазонів вимірювань 1:100 (1:200 –
для датчиків 3051S).
Межа основної наведеної похибки, що допускається,
±0,065%.
|
|
Вихідні сигнали:
|
|
– 4–20 мА з
цифровим сигналом на базі НАRТ-протоколу;
– FIELDBUS Foundation;
– економічний 0,8-3,2; 1–5 В з цифровим
сигналом на базі HART-протоколу.
|
|

|
Bcі моделі
можуть бути виконані з виносними мембранами.
|
|
3051С. Нині це датчики з місткою чарункою для вимірювань
перепаду тиску, надмірного, абсолютного тиску в діапазоні від 0,012 до
27580 кПа.
3051Т. Конструкція сенсорного модуля з використанням
удосконаленого п’єзорезистивного сенсора для вимірювань надмірного і
абсолютного тиску від 2,07 до 68948 кПа.
3051L. Комплекс датчиків, призначених для вимірювань
гідростатичного рівня рідини в резервуарах від 0,62 до 2070 кПа. Компактні
і прості в обслуговуванні датчики для відкритих, закритих резервуарів
(танкерів), з різними типами фланцевих з'єднань, можливістю промивання
мембран і захистом від парафінових відкладень.
3051Н. Забезпечення вимірювань перепаду тиску,
надмірного, абсолютного тиску у високотемпературних процесах (до 191˚С)
без використання виносних мембран або капілярів від 0,62 до 13800 кПа.
|
|
|
Датчики серії 3051 мають широкий спектр моделей, що відрізняються
конструктивним виконанням і вимірюваним тиском:
|
|
С – компланарна конструкція на базі
місткого/п’єзорезистивного сенсора;
Т – штуцерна конструкція на базі п’єзорезистивного
сенсора;
Н – конструкція, що поєднує компланарне і
традиційне фланцеве виконання на базі ємнісного/п’єзорезистивного сенсора
для високотемпературних процесів;
L – конструкція для гідростатичного
вимірювання рівня;
D – для вимірювання перепаду тиску;
G – для вимірювання надмірного тиску;
А – для вимірювання абсолютного тиску.
Існуючі моделі датчиків серії 3051 – CD,
CG, СА, TG, ТА, LD, LG, HD, НG.
|
Під час роботи датчика на
базі ємнісного сенсора розділові мембрани містяться з боку високого і низького
тиску датчика, передають робочий тиск процесу масляній рідині, що його
заповнює. Ця рідина, у свою чергу, передає тиск сенсорній мембрані в центрі
σ-чарунки сенсора. Сенсорна мембрана діє як розтягнута пружина,
відхиляючись у відповідь на перепад тиску (у датчиках надмірного тиску
атмосферний тиск прикладається аналогічно з боку низького тиску).
На датчиках з
п’єзорезистивним сенсором абсолютний тиск, прикладений до розділової
мембрани, передається на полікремнієвий сенсор через кремнійорганічну або
інертну рідину, як показано на рис. 2.21. Тиск процесу, прикладений до
сенсора, створює дуже мале прогинання чутливої мембрани, яке призводить до
зміни опору в ланцюзі містка Уїтсона. Зміна опору, що характеризує тиск,
перетворюється в цифровий сигнал для обробки мікропроцесором.
Сенсорний модуль датчиків
3051 має вбудований термометр для корекції і обліку температурних ефектів.
Під час процедури характеризації на заводі всі сенсори піддаються дії
температур і тиску у всьому робочому діапазоні. Результати цих вимірювань
використовуються для розрахунку коефіцієнтів лінеаризації, які зберігаються в
пам'яті сенсорного модуля і забезпечують корекцію сигналу під час роботи
датчика.
|
|
Електронний модуль
|
|
Електронний модуль
складається з плати, виготовленої з використанням друкарського монтажу і
мікропроцесорної технології ASIC. Ця плата приймає цифровий вхідний сигнал
від сенсорного модуля разом з коефіцієнтами корекції, а потім коректує і
лінеаризує його. Вихідний блок електронного модуля перетворює цифровий
сигнал в аналоговий і здійснює зв'язок з комунікатором HART. Стандартним
аналоговим вихідним сигналом є вихід 4–20 мА:
економічний датчик має вольтовий вихідний сигнал
(1–5 або 0,8–3,2 В).
Додатковий
РК-індикатор легко вставляється в електронну плату і виводить цифрові
значення сигналу у фізичних одиницях або відсотках від аналогової шкали.
РК-індикатор використовується як у стандартних, так і в економічних
датчиках.
|
|

|
Зберігання
даних
|
|
Дані конфігурації зберігаються в
енергонезалежній пам'яті електронного модуля датчика. Ці дані залишаються в
датчику навіть під час вимкненого електроживлення, тому при ввімкненні
живлення датчик відразу готовий до роботи.
|
|
|
Коди і характеристики вихідних сигналів
|
|
Код А. 4–20 мА постійного струму зі
зміною за лінійним законом або за законом квадратного кореня від вхідного
тиску (на вибір користувача); підтримує HART-протокол.
Код М економічний, 1–5 В або 0,8–3,2 В (код опції С2) постійного
струму зі зміною за лінійним законом або законом квадратного кореня від
вхідного сигналу (на вибір користувача); підтримує HART-протокол (окрім
3051Р).
Код F. Електроніка для забезпечення роботи в протоколі Foundation
Fieldbus.
|
|
|
Демпфування
|
|
Постійна часу відгуку аналогового виходу
на вхідний східчастий сигнал становить від 0 до 36 с (вибирається користувачем).
Цей час додається до часу відгуку сенсорного модуля.
|
|
|
Зберігання даних
|
|
Потрібне зовнішнє джерело живлення: стандартний датчик (4–20 мА) працює без навантаження за напруг постійного струму
від 10,5 до 55 В.
|
|
|
Обмеження навантаження
|
|
Максимальний опір контуру визначається рівнем напруги зовнішнього
джерела живлення відповідно до діаграми. Мінімальний опір контуру зв'язку –
250 Ом.
|
|
Схеми встановлення датчика
гідростатичного тиску в закритих резервуарах
|
|
|
|
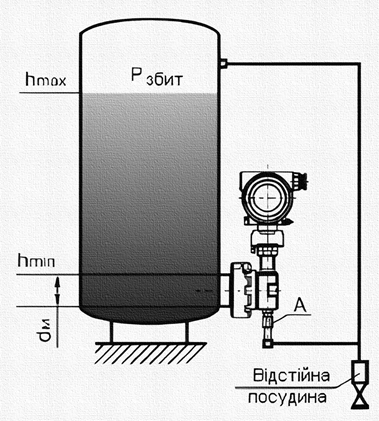
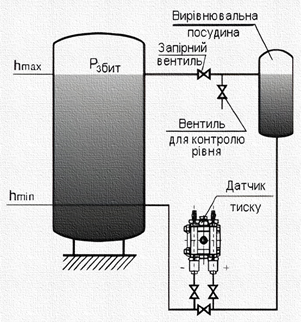
Рис. 2.22. Схема встановлення гідростатичних датчиків для визначення
рівня в закритому резервуарі під тиском
|
У закритих резервуарах тиск над рідиною Рзбит
впливає на результат вимірювань. Тому Рзбит треба подати на датчик
тиску, поєднуючи статичну порожнину датчика з об’ємом резервуара над рідиною.
|
|
|
|
|
Примітки:
|
|
1. Середовище, що знаходиться у верхній частині
резервуара, не конденсується.
2. Датчик налаштований на дію тиску з боку відкритої
мембрани.
|
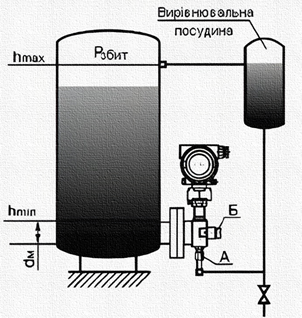
Для
процесів, де не можна запобігти утворенню та накопиченню конденсату в трубі, що
поєднує датчик з об’ємом над рідиною, пропонується застосування схем
підключення датчика з вирівнювальною посудиною (рис. 2.22), що поєднується
трубою, заповненою водою. Густина рідини в резервуарі і вирівнювальній
посудині має бути однаковою.
|
|
|
|
|
Примітки:
|
|
1. Середовище, що знаходиться у верхній частині
резервуара, не конденсується.
2. Датчик налаштований на дію тиску з боку штуцера
«А».
3. На відміну від схем установлення датчика на рис.
2.23 та 2.24 за максимального рівня рідини в ємності hmax індикатор датчика
показує «0», а за мінімального рівня hmin покази індикатора відповідають
верхній межі вимірювань.
|
|
|
|
|
|
|
Рис. 2.24. Схема встановлення гідростатичних
датчиків для визначення рівня в закритому резервуарі під тиском
|
Рис. 2.23. Схема встановлення
гідростатичних датчиків для визначення рівня в закритому резервуарі під
тиском
|
|
|
|
Радарний рівнемір
|
|
|
|
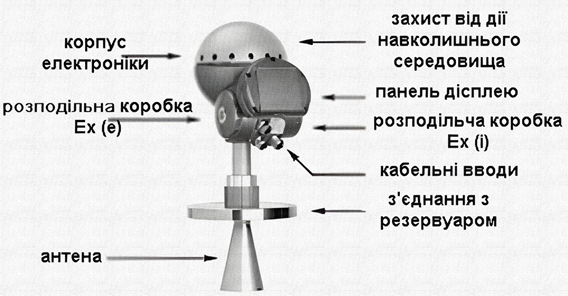
Рис. 2.25.
Будова радарного рівнеміра
|
|
Призначення
|
|
Радарний рівнемір призначений для визначення рівня в резервуарах
зберігання темних та світлих нафтопродуктів.
|
|

|
|

|
Робота радіолокаційного рівнеміра
Джерело:
https://www.youtube.com/watch?v=lY9CkPdm2U8&t=1s
|
Будова та принцип роботи. Особливістю
цього
рівнеміра є відсутність пар і елементів,
які обертаються і які труть, що забезпечує
високу точність, надійність і довговічність вимірювальних систем, у яких
використовується цей тип рівнеміра.
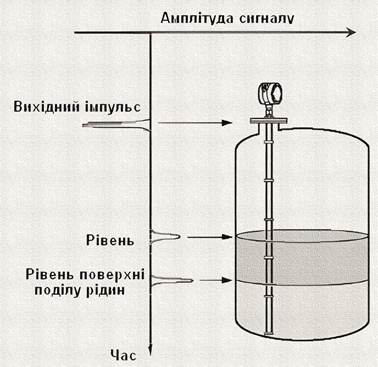
Рівень рідини при застосуванні рівнеміра
радіолокації визначається відстанню між рівнеміром та її поверхнею і
визначається, подаючи імпульс радіосигналу антеною і приймаючи цією ж
антеною імпульс, відбитий від поверхні рідини. За часом, що пройшов між видачею і прийомом сигналу,
визначається відстань між антеною і поверхнею продукту (вільний простір), яка автоматично перераховується у висоту
зливу продукту. Для цього розроблений спеціальна техніка, іменована синтезуючий імпульсний радар (SPR),
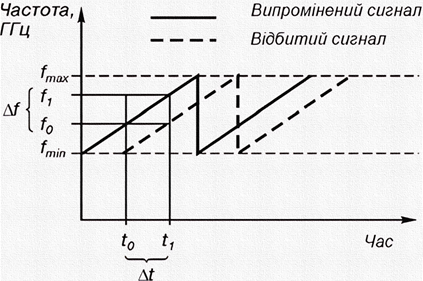
що дозволяє передавати і приймати сигнал з модульованою частотою. Для визначення різниці частот
порівнюють характеристики прямого і відбитого сигналу, різниця яких
визначає довжину пробігу сигналу (рис.
2.26). Завдяки розширеним обчислювальним
можливостям рівнеміра радіолокації, з його допомогою можна аналізувати
характеристики сигналу в межах повного
спектра віддзеркалення, що унеможливлює будь-які втрати інформації і дозволяє
враховувати негативні чинники (помилкові луна-сигнали, віддзеркалення
від стінок резервуару, вплив пароповітряної
суміші тощо).
Завдяки частоті радіовипромінювання, що використовується, 90 Ггц, досягається
роздільна здатність в одиниці мікронів. Рівнемір здатний виміряти
рівні з гарантованою точністю в
найнесприятливіших умовах. На точність його показів не впливають ні
пил, ні підвищена вологість, ні відстань до
контрольованого рівня продукту, ні в'язкість продукту.
|
Схеми встановлення датчика
гідростатичного тиску в закритих резервуарах
|
|
|
|
|
Рис. 2.26. Принцип роботи радарного рівнеміра
|
Рівнемір однаково надійно працює як зі світлими, так і з темними нафтопродуктами. Вузький промінь
дозволяє використовувати рівнемір
практично у всіх типах резервуарів. Рівнемір просто експлуатувати і
обслуговувати, оскільки він встановлюється
ззовні резервуара і для його монтажу не потрібні трудомісткі роботи.
Періодична перевірка проводиться на місці без демонтажу приладу. Антена
рівнеміра виготовляється з фторопласту і
надійно захищена від забруднень.
Застосування цифрового інтерфейсу RS-485 і протоколу Modbus забезпечує
інтеграцію рівнеміра в наявні АСУТП.
|
|
|
|
|
Рівнемір
виконує такі операції:
|
|
- безперервно вимірює рівень нафтопродукту;
- обчислює об'єм нафтопродукту;
- контролює зливання-наливання нафтопродукту;
- контролює рух продукту в резервуарному парку;
- контролює витікання продукту, видаючи аварійний сигнал і ведучи
журнал аварійних сигналів.
|
Виконання цих операцій дозволяє побудувати системи комерційного обліку. З рівнеміром постачається
пакет програмного забезпечення.
|
Буйкові рівнеміри
|
|
|
|
|
Технічні характеристики
|
|
|
|
Вимірювані середовища – рідкі (нафта, темні і світлі
нафтопродукти, вода, зріджений газ тощо). Похибка вимірювань рівня: від
±0,25%.
Діапазон робочого тиску: до 42 МПа.
Температура навколишнього середовища: від -40
до 80˚С.
Температура робочого середовища: від -29 до 593˚С.
Вибухозахищене виконання.
|
|
|
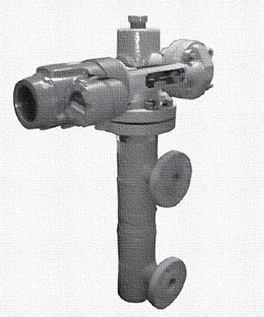
Рис. 2.27. Загальний вигляд
буйкового рівнеміра
|
|
|
|
|
|
|
|
Маркування вибухозахисту
сенсора – ЕЕхdIIСТб; ступінь захисту від проникнення пилу і води IP 66.
Міжперевірковий інтервал – 1 рік.
|
Буйкові рівнеміри
|
|
|
|
Призначення
|
|
|
Буйкові рівнеміри – це
засіб для безперервного вимірювання рівня рідких продуктів у резервуарах і місткостях, вимірювання рівня розділу
двох рідин, визначення густини продукту за пропорційною зміною положення
плаваючого буйка.
|
|
|
|
|
Вони добре
працюють у різних рідинах за широкого діапазону температур і тиску. Буйкові
рівнеміри застосовуються також для розв’язання різних прикладних задач у
багатьох галузях промисловості. Сучасна електроніка дозволяє вбудовувати
рівнеміри в АСУТП будь-якої складності.
Сенсори рівня серії 249 можуть використовуватися з
пневматичними (239О) і електронними (DLC3000) контролерами рівня.
Випускаються у двох модифікаціях: сенсори з виносною камерою і сенсори
верхнього монтажу (безкамерні). Сенсори з виносною камерою забезпечують вищу
стабільність роботи порівняно з безкамерними сенсорами, особливо для
резервуарів з перегородками і з можливістю виникнення турбулентної течії.
Безкамерні сенсори, як правило, використовуються тоді, коли необхідно
вимірювати густину або рівень поверхні поділу двох середовищ. Модернізований
електронний перетворювач DLC3000 поліпшує функціональність приладу для
забезпечення вимог сучасних АСУТП.
|
Будова та
принцип роботи
|
|
|
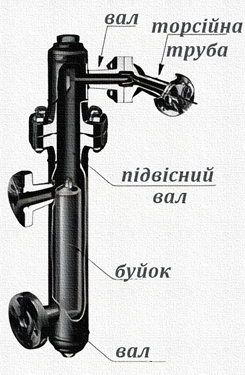
Буйковий рівнемір є приладом, що
перетворює зміну відштовхувальної сили в обертальний рух вала навкруги осі
торсійної трубки рівнеміра.
Зміна відштовхувальної сили
пропорційна об'єму і густині витисненої рідини. Коли змінюється рівень
рідини (рівень поверхні поділу середовищ) або густина рідини, буйок
зсовується і повертає торсійну трубку (кут повороту пропорційний зміні
відштовхувальної сили, моменту сили, що діє на буйок).
Поворотний рух торсійної трубки
передається на цифровий контролер серії DLC3000, який перетворює кут
повороту в електричний сигнал.
|
|
Рис. 2.28. Будова буйкового
рівнеміру
|
|
|
|
|
|
Радарний передавач рівня
Джерело:
https://www.youtube.com/watch?v=_uLOMMCQek4
|
Окрім аналогового сигналу 4-20
мА, який подається на вихід, контролер може передавати інформацію в цифровому
вигляді за протоколом HART, що дозволяє користувачу легко отримати доступ до
інформації, яка може бути критичною для даного технологічного процесу.
Буйковий рівнемір складається з сенсора рівня і контролера. Сенсор рівня
серії 249 складається з камери, поплавця, вала, торсійної трубки і підвісного
вала.
Залежно від умов та місця
встановлення рівнеміра можна застосовувати один з варіантів виконання сенсорів з виносною камерою.
|
|
|
|
|
|
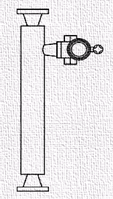
Виконання 1
|
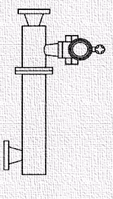
Виконання 2
|
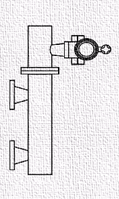
Виконання 3
|
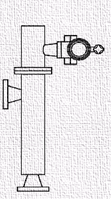
Виконання 4
|
|
Верхнє і нижнє з'єднання: різьбові або фланцеві
|
Верхнє і нижнє бічне з'єднання: різьбові або фланцеві
|
Верхнє і нижнє бічні з'єднання: різьбові або фланцеві
|
Верхнє бічне і нижнє з'єднання: різьбові або фланцеві
|
|
Рис. 2.29. Виконання сенсорів з виносною камерою
|
|
Хвилеподібний рівнемір серії 3300
|
|
|
|

|
Призначення
|
|
|
|
Хвилеподібні рівнеміри серії
3300 (рис. 2.30) – це інтелектуальні прилади, побудовані на основі
хвилеподібної технології, що забезпечують надійне вимірювання рівня рідин і
суспензій у складних умовах експлуатації.
|
|
|
Рис.
2.30. Загальний вигляд хвилеподібного рівнеміра
|
|
|
|
|
|
|
|
|
|
Рівнеміри
застосовуються в таких галузях промисловості:
|
|
– хімічна і нафтохімічна;
– нафтогазова;
– целюлозно-паперова;
– фармацевтична;
– харчова промисловість і виробництво напоїв;
– контроль питної води і стічних вод;
– енергетика (дамби і гідроелектростанції).
|
|
Переваги:
|
|
– точність вимірювань не залежить від діелектричної проникності,
густини, температури, тиску і рН;
– різні типи зондів дозволяють застосовувати датчик у резервуарах з
внутрішніми конструкціями, турбулентністю, піною і для середовищ, які
утворюють плівку на зонді;
– надійне вимірювання сипких речовин (гранули, порошки);
– простота встановлення;
– низька вартість кабелів (можна використовувати наявні кабелі);
– простота заміни датчиків, використовуваних раніше, можливе
використання конструкційних пристосувань від буйкового рівнеміра;
– можливість одночасно вимірювати рівень зовнішньої поверхні і поверхні
розділу двох рідин;
– розширений діапазон експлуатації;
– надійність вимірювання в умовах високої турбулентності або вібрацій;
– значне скорочення експлуатаційних витрат.
|
|
Технічні характеристики. Вимірювані середовища – рідкі
(нафта, темні і світлі нафтопродукти, вода, водні розчини, зріджений газ,
кислоти тощо).
Діапазон
вимірювань рівня – від 0,1 до 23,5 м.
Вихідний
сигнал: 4-20 мА з цифровим сигналом на базі HART-протоколу.
|
|
|
Похибка вимірювань рівня:
- ±5 мм для зондів ≤5 м;
- ±0,1% від вимірювальної
відстані,
|
|
для зондів >5 м.
Виконання: звичайне,
вибухозахищене.
Маркування вибухозахисту: іскробезпечний
ланцюг OExlallCT4: вибухонепроникна оболонка 1Exd[ia]IICT6.
Ступінь захисту від дії пилу і
води – ІР66.
Міжперевірковий інтервал – 1
рік.
|
|
|
|
Рис. 2.31. Принцип дії хвилеподібного рівнеміра
|
Будова і принцип
роботи.
Принцип дії рівнеміра заснований на технології рефлектометра
з тимчасовим дозволом (TDR – Time Domain Reflectometry). Мікрохвильові
радіоімпульси малої потужності прямують вниз по зонду, зануреному в
технологічне середовище, рівень якого потрібно визначити. Коли радіоімпульс
досягає середовища з іншим коефіцієнтом діелектричної проникності, через
різницю коефіцієнтів діелектричної проникності повітря і рідини
мікрохвильовий сигнал відбивається у зворотному напрямі. Інтервал між
моментом передачі зондувального імпульсу і моментом прийому луна-сигналу пропорційний
відстані до рівня контрольованого середовища. Аналогічно вимірюється відстань
між датчиком і межею поділу двох рідких середовищ з різними коефіцієнтами
ді-електричної проникності.
Інтенсивність відображеного
сигналу залежить від діелектричної проникності середовища. Що вища
діелектрична проникність, то вища інтенсивність відображеного сигналу.
Радарний метод має низку переваг порівняно з іншими методами вимірювання
рівня: радіоімпульси практично несприйнятливі до складу середовища, атмосфери
резервуара, температури і тиску.
|
|
У датчику 3300 для зручності застосування і обслуговування в
різних умовах використані такі принципи і конструкторські рішення:
|
|
– модульність конструкцій;
– удосконалена аналогова і цифрова обробка сигналу;
– можливість використання зондів кількох типів залежно від умов
застосування датчика;
– підключення двопровідним кабелем (живлення подається по сигнальному
контуру);
– підтримка комунікаційного цифрового протоколу HART, що забезпечує
вивід даних у цифровому вигляді і можливість дистанційного настроювання
приладу.
|
Оскільки радіоімпульси прямують по зонду, ця технологія вимірювання може застосовуватися
для малих і вузьких резервуарів, а також для резервуарів з вузькою
горловиною.
Знімна головка датчика дозволяє замінювати модуль
електроніки, не порушуючи герметичності резервуара, що може бути важливим під
час вимірювання рівня зріджених газів і аміаку. Електроніка датчика і клемна
колодка для підключення кабелю розташована в окремих відсіках корпусу.
Головка датчика може повертатися на 360˚ для розміщення індикатора в
зручному положенні.
|
|
Точність і
надійність вимірювань одним датчиком двох параметрів рівня зовнішньої
поверхні і рівня поділу двох рідких середовищ забезпечується:
|
|
– технологією динамічної
оптимізації коефіцієнта посилення;
– подальшою цифровою обробкою сигналу;
–мікропроцесорною електронікою датчика.
|
технічні характеристики й умови експлуатації
наведено в табл. 2.1.
|
Таблиця 2.1
|
|
Технічні характеристики й умови експлуатації
|
|
Параметри
|
Значення
|
|
Прилад
|
Хвилеподібний радарний датчик
рівня і рівня поділу двох
|
|
рідин серії 3300.Модель 3301 –
датчик рівня (вимірювання рівня поверхні поділу можливе за повного
занурення зонда). Модель 3302 – датчик рівня і рівня поділу двох рідин
|
|
Вихідні змінні
|
Модель 3301: рівень, відстань до
поверхні, об'єм (для
|
|
повністю зануреного зонда: рівень
поверхні поділу двох рідин і відстань до поверхні поділу. Модель 3302:
рівень, відстань до поверхні, об'єм, рівень поверхні поділу двох рідин,
відстань до поверхні поділу і товщина шару верхнього продукту.
|
|
Одиниці
вихідного сигналу
|
Для рівня, рівня поверхні поділу
двох рідин і відстані до рівнів: м, см, мм, дюйми, фути. Для об'єму: куб.
м, літри, куб. дюйми, барелі, галони та ін.
|
|
Опорні умови
|
Двопровідний зонд, вода за температури 25˚С
|
|
Випромінювана
потужність
|
Номінальна 50 мкВт, максимальна 2 мВт
|
|
НART – пристрій
для конфігурування
|
HART-комунікатор моделі 375 фірми Emerson
|
|
Дистанційне конфі-гурування з персо-нального
комп'ютера
|
За підтримки програмного
забезпечення Radar Configuration Tools або 10 AMS (система обслуговування
КІП і А) фірми Emerson
|
|
Вбудований
дисплей
|
На вбудованому дисплеї можуть відображатися такі параметри: рівень, відстань до поверхні, об'єм,
внутрішня температура, відстань до поверхні розділу двох рідин, рівень
поверхні розділу двох рідин, амплітуда піку, товщина шару, відсоток
діапазону, вихідний струм датчика.
Примітка: дисплей не забезпечує
конфігурування датчика
|
|
|
|
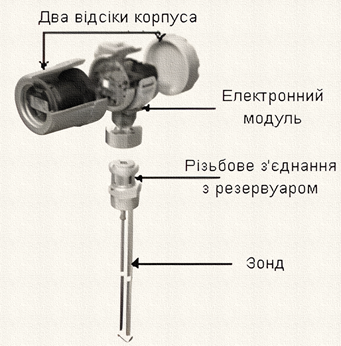
Рис. 2.32. Будова хвилеподібного
рівнеміра
|
Хвилеподібний радарний
датчик має такі елементи (рис. 2.32): алюмінієвий корпус, електронний модуль,
фланцеве або різьбове з'єднання з резервуаром і зонд.
Хвилеподібний
радарний датчик серії 3300 складається з алюмінієвого корпусу датчика, у
якому міститься електронний модуль, що виконує обробку сигналу.
Електронний
модуль випромінює електромагнітні імпульси, які розповсюджуються по зонду,
виконує обробку відбитого (прийнятого) сигналу і видає інформацію у вигляді аналогового або цифрового сигналу на вбудований
рідкокристалічний індикатор або в систему вимірювання.
Корпус датчика, що
складається з двох незалежних відсіків (відсік електроніки і клемний відсік для
підключення кабелів), може бути знятий із зонда, при цьому відкривати
резервуар не треба. У клемному відсіку є два отвори для підведення кабелю і
установлення відповідного кабельного ущільнення для забезпечення
герметичності.
Залежно від
застосування використовуються 5 типів зондів. Загальна довжина зонда
визначається від верхньої опорної точки до кінця зонда (з урахуванням довжини
вантажу, якщо він використовується).
Коаксіальний
зонд (рис.
2.33, а). Оптимальне рішення
для вимірювання рівня зовнішньої поверхні і рівня розділу двох будь-яких
чистих рідин, наприклад, розчинників, спиртів, водних розчинів, зріджених
газів і рідкого аміаку. Коаксіальний зонд забезпечує найвище відношення
сигнал/шум. Рекомендується для вимірювання рівня рідин з низькою
діелектричною проникністю, а також для вимірювань в умовах турбулентності, за
наявності піни чи потоків рідини або пари поблизу зонда (оболонка
коаксіального зонда працює як заспокійливий колодязь). Може використовуватися
в умовах електромагнітних перешкод і в разі контакту з металевими
конструкціями. Не рекомендується для середовищ, схильних до кристалізації або
налипання, а також для порошків. Максимальний діапазон вимірювання становить 6 м.
|

|

|

|

|

|
|
а)
|
б)
|
в)
|
г)
|
д)
|
|
Рис. 2.33.
Види зондів хвилеподібного рівнеміра: а - коаксіальний; б - жорсткий
однострижневий; в - жорсткий
двострижневий; г - гнучкий
однопровідний; д - гнучкий
двопровідний
|
Однострижневий
жорсткий або однопровідний гнучкий зонди. Менш сприйнятливі
до налипання середовища і утворення наростів. Однострижневий зонд (з жорстким
стрижнем) (рис. 2.33, б) рекомендують застосовувати в малих резервуарах,
висотою до 3 м,
однопровідний гнучкий (2.33, г) – у резервуарах до 23,5 м. Можуть
застосовуватися для в'язких рідин, суспензій, пива і алкогольних напоїв,
водних розчинів, також використовують з санітарною метою – у харчовій і
фармацевтичній промисловості. Можна використовувати для вимірювання рівня твердих
частинок, гранул і порошків, наприклад, зерна, піску, сажі тощо.
Застосовується для вимірювання рівня в'язких рідин, наприклад, сиропу, меду
тощо, а також водних розчинів.
Двострижневий
жорсткий або двопровідний гнучкий зонди. Призначені для
вимірювання рівня рідин (нафтопродукти, розчинники, водні розчини тощо).
Можна вимірювати рівні розділу рідких середовищ. Можуть застосовуватися з
більш в'язкими рідинами, ніж коаксіальний зонд, проте не слід застосовувати
цей зонд для липких продуктів, коли є вірогідність налипання й утворення
перемичок між двома стрижнями і дротами зонда. Двострижневий зонд з жорсткими
стрижнями можна використовувати в резервуарах до 3 м (рис. 2.33, в). Для
гнучкого двопровідного зонда діапазон вимірювань до 23,5 м (рис. 2.33, д).
|
Схеми встановлення датчика
гідростатичного тиску в закритих резервуарах
|
|
|
|
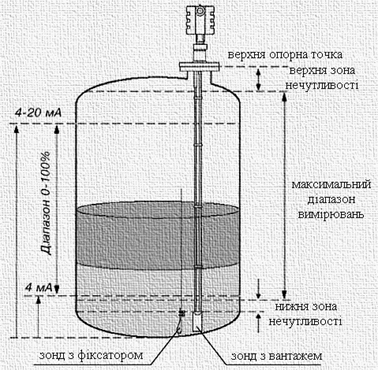
Рис. 2.34. Зона нечутливості при застосуванні хвилеподібного рівнеміра
|
Зона нечутливості. Зоною нечутливості називається зона, у якій проведення вимірювань
неможливе або точність вимірювань неприпустимо мала (рис. 2.34. і табл. 2.2).
Діапазон
вимірювання залежить від типу зонда і від властивостей середовища в
резервуарі. Верхня зона нечутливості – це мінімальна відстань між верхньою
опорною точкою і поверхнею продукту. Верхня зона нечутливості може бути
задана в межах 0,1 і 0,5 м
залежно від типу зонда і від властивостей середовища. У нижній частині
резервуара діапазон вимірювань обмежується через наявність нижньої зони
нечутливості, відлічуваної від кінця зонда. Нижня зона нечутливості також
залежить від типу застосованого зонда і продукту.
|
Таблиця 2.2
|
|
Величини зони нечутливості залежно від типу зонда
|
|
|
Діелек-трична проникність
|
Коаксі-альний
|
Жорсткий двостри-жневий
|
Жорсткий одностри-жневий
|
Гнучкий дво-провідний
|
Гнучкий одно-провідний
|
|
Верхня
зона
нечутливості
|
80
|
10 см
|
20 см
|
30 см
|
20 см
|
30 см
|
|
|
Діелек-трична проникність
|
Коаксі-альний
|
Жорсткий двостри-жневий
|
Жорсткий одностри-жневий
|
Гнучкий двопро-відний
|
Гнучкий однопро-відний
|
|
Нижня
зона нечутливості
|
2
|
10 см
|
20 см
|
40 см
|
35 см
|
50 см
|
|
30
|
3 см
|
5 см
|
5 см'"
|
5 см
|
5 см'"
|
|
2
|
5 см
|
7 см
|
15 см'"
|
10 см
|
12 см'"
|
|
Коріолісові витратоміри
|
|
|
|
|
Призначення
|
|
|
|
Коріолісовий витратомір призначений для вимірювання масової і
обчислення об'ємної витрати рідких і газоподібних середовищ;
використовується в системах автоматичного контролю і керування
технологічними процесами в різних галузях промисловості, а також у системах
комерційного обліку.
|
|
|
Рис.
2.35. Зовнішній вигляд коріолісовий витратомірів
|
|
|
|
|
|
|
|
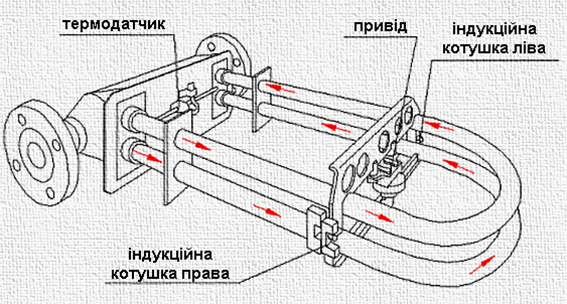
Будова та принцип роботи. Основними елементами датчика витрати є дві витратні трубки, на яких
монтуються: сполучна коробка з силовою електромагнітною (задавальною)
котушкою збудження і магнітом; два тензодатчики з магнітами і
електромагнітними котушками; терморезистор.
Елементи датчика закриті захисним кожухом, на якому
нанесений покажчик напряму потоку.
|

|
|
|
Принцип вимірювання потоку Коріоліса
Джерело:
https://www.youtube.com/watch?v=XIIViaNITIw
|
|
|
|
|
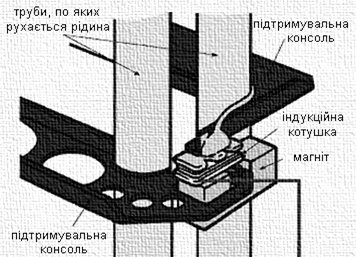
Рис. 2.36. Будова коріолісового витратоміра
|
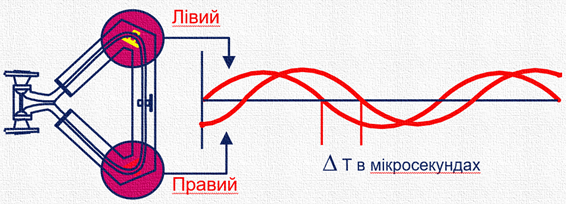
Масова витрата визначається шляхом
вимірювання тимчасової затримки між сигналами детекторів, яка пропорційна
масовій витраті. За відсутності потоку середовища витратна трубка не
вигинається і вихідний сигнал відсутній. Резонансна частота трубки залежить
від її геометрії, матеріалу, конструкції і маси. Маса складається з двох
частин: маси самої трубки і маси вимірюваного в трубці середовища. Маса
трубки (трубок) постійна для конкретного датчика. Трубка може бути зігнутою
або прямою. За умови розташування трубок вертикально – витратомір є самозаповнювальним.
Коли витратомір складається з двох паралельних трубок, потік розділяється на
два потоки на вході і з'єднується в один на виході. У разі застосування
однієї трубки (або з’єднаних послідовно двох трубок) потік у витратомірі не
розділяється. Електромагнітний привод, що змушує трубки вібрувати,
складається з котушки, з’єднаної з однією трубкою, і з магніту, з’єднаного з
іншою трубкою. На котушку подається змінний струм, який змушує магніт
періодично то притягуватися, то відштовхуватися.
Розглянемо докладніше це явище (рис. 2.37).
|
|
|
|
Рис. 2.37. Тензодатчик з
магнітами і електромагнітними котушками
|
На провідник зі струмом, яким є котушка, у магнітному полі
(магніт) діє сила Ампера, рівна твору сили струму на векторний твір елемента
довжини провідника на магнітну індукцію поля: dF=I[dl,B], де dF – елементарна
сила Ампера, I – сила струму, dl – елемент довжини провідника, В – індукція
магнітного поля. Оскільки магніт і котушка жорстко закріплені на різних
трубках, то сила відштовхуватиме і притягатиме трубки одну від одної або одну
до одної. Необхідною умовою є наявність змінного струму в котушці, оскільки
сила повинна змінювати напрям. Датчик може визначити положення, швидкість або
прискорення трубок. Якщо використовуються електромагнітні датчики, магніт і
котушка в датчику міняють своє положення один щодо одного під час того, як
трубки вібрують, викликаючи зміну в магнітному полі котушки. Тому синусоїдна напруга
на котушці є рухом трубок. Усередині витратомірних трубок спеціальної форми
рухається вимірюване середовище. Під впливом задавальної котушки витратомірна
трубка коливається з резонансною частотою. У результаті ефекту Коріоліса, що
виникає під час руху середовища в трубці, що коливається, різні її частини
згинаються одна відносно одної. Цей
вигин призводить до взаємного розузгодження по фазі коливань різних ділянок
витратомірної трубки, яке перетворюється електромагнітними детекторами
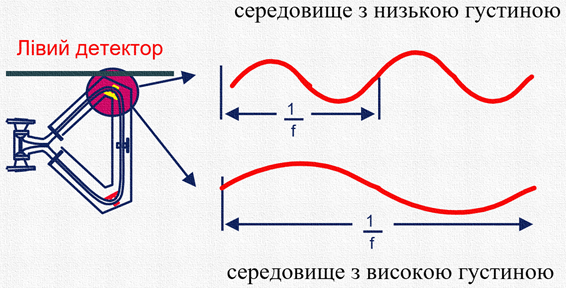
швидкості у вихідний сигнал датчика витрати. Густина середовища обчислюється
на підставі лінійної залежності між частотою і періодом коливань трубки з
використанням калібрувальних констант (рис. 2.39). За отриманими значеннями
масової витрати і густини обчислюється об'ємна витрата.
|
|
|
|
Рис. 2.38. Визначення масової витрати
|
|

|
|
Рис. 2.37. Тензодатчик з
магнітами і електромагнітними котушками
|
|
|
|
Рис. 2.39. Визначення густини
|
Коріолісові масові витратоміри можуть визначати потік усіх рідин,
зокрема ньютонівських і неньютонівських, а також достатньо щільних газів.
Вони можуть застосовуватися на виробництві, де слід дотримуватися жорстких
санітарних умов і де потрібна гігієнічність. Під час зливання рідини з
резервуара, автоцистерни, залізничної цистерни може виникнути потік, що
складається з двох окремих фаз (рідина і газ). При цьому покази приладу будуть помилковими. Якщо контролер має
функцію виявлення двофазного потоку, то вимірювання будуть автоматично
зупинені. Контролер може визначити такий потік за надмірно високою енергією,
що споживається приводом, або за падінням густини потоку (зменшення амплітуди
вихідного сигналу датчика). Кількість попутного повітря, що допускається
приладом, залежить від в'язкості рідини. Рідини з в'язкістю до 300,000 мПа٠c
можуть вимірюватися коріолісовим витратоміром. Вміст газу в таких
високов'язких рідинах може бути до 20%, причому газ має бути у вигляді
дрібних пухирців, гомогенно диспергованих. Газ у рідинах з низькою в'язкістю,
як молоко, відокремиться за концентрації газу до 1%. Вартість витратоміра
середнього розміру (до 2 дюймів (50,8 мм)) знаходиться в межах 4000-5000$.
Застосовувати такі витратоміри раціонально там, де потрібна висока точність
(вузол комерційного обліку), а також там, де необхідно виміряти кілька
параметрів (зокрема густину, температуру, тиск). З другого боку, їх
застосування нераціональне, при вимірюваннях у простих системах, де об'ємні
витратоміри достатні і висока точність не настільки важлива.
|
|
|
Питання для самоконтролю
|
|
1. Призначення, технічні
характеристики та застосування датчиків гідростатичного тиску.
2. Дайте характеристику схемам встановлення
датчиків гідростатичного тиску в закритих резервуарах.
3. Призначення, технічні
характеристики та принцип роботи радарних рівномірів.
4. Призначення, технічні
характеристики та принцип роботи буйкових рівномірів.
5. Призначення, технічні
характеристики, принцип роботи та умови експлуатації хвилеподібних
рівномірів.
6. Призначення, технічні
характеристики, принцип роботи та умови експлуатації коріолісових
витратомірів.
|
|