|
|
|
АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ І СИСТЕМИ АВТОМАТИЧНОГО КЕРУВАННЯ Електронний
посібник |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ У
ТВАРИННИЦТВІ ТА ПТАХІВНИЦТВІ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.
Автоматизація годування та напування
тварин і птахів 2.3.1. Технологічні основи автоматизації годівлі тварин
і птахів 2.3.2. Автоматизація кормороздавачів для
ферм великої рогатої
худоби 2.3.3. Автоматизація кормороздавачів для
свиноферм 2.3.4. Автоматизація кормороздавачів для
птахоферм 2.3.5. Автоматизація напування тварин і птахів Процес роздачі кормів є одним із трудомістких на тваринницьких
та птахівницьких фермах. Технологія роздачі кормів знаходиться в тісному
зв'язку з загальним технологічним циклом, прийнятим на фермі.
·
виду та віку
тварин і птахів; ·
способів їх утримання, раціонів
годування; ·
норм видачі корму одній тварині; · розрахункового поголів’я тварин.
· мобільні; · обмежено-мобільні; · стаціонарні кормороздавачі.
Нині отримали поширення два основних види годівлі тварин
та птахів – ненормоване і нормоване. У ненормованому випадку кількість корму
не нормується, а в другому – кожній тварині та птахові залежно від його
продуктивності і деяких інших факторів видається визначена індивідуальна
роздача корму. Найчастіше для спрощення технології годівлі на фермах
застосовують групове нормування, коли кормовий раціон розраховують, виходячи
з потреб середньої групи тварини чи птахів. На великих тваринницьких комплексах з
характерними для них сучасної машинної технології і потоковістю виробництва
виникає нагальна потреба застосування
автоматизованих систем керування, що дозволяє найбільше повно й
ефективно використовувати устаткування, значно знизити трудові витрати і
вартість продукції, збільшити продуктивність і поліпшити умови праці. У таких системах як правило
відбувається об'єднання декількох технологічних операцій у загальну потокову
лінію з місцевим, дистанційним та автоматизованим керуванням електроприводами
машин і механізмів. Найчастіше
спільно проєктуються лінії транспортування і роздачі кормів.
Роздача кормів на фермах
великої рогатої худоби обумовлюється в основному раціоном годівлі та способом
утримання тварин.
Роздавач всередині
годівниці РВК-Ф-74 (рис. 2.3.2) призначений для
роздавання зелених, грубих і соковитих кормів та кормових сумішей під час
утримання корів на прив'язі. Це ряди годівниць, всередині яких змонтовано
транспортер. Транспортер-кормороздавач складається з годівниць, завантажувального
бункера, приводної станції, стрічкового транспортера. Привод
складається із рами, на якій розміщена приводна станція. Передача крутного
моменту на ведучий вал приводу стрічкового транспортера від приводної станції
здійснюється через ланцюгову передачу. Робочий орган – це стрічка з
прикріпленим до неї канатом і круглоланковим ланцюгом.
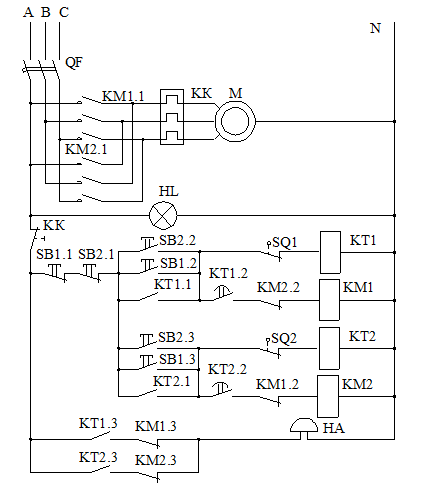
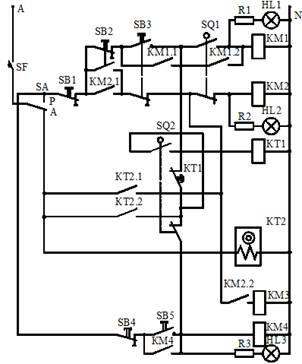
Принципову
електричну схему кормороздавача РВК-Ф-74 зображено на рис. 2.3.3. Ввідним апаратом
щита керування кормороздавача є автоматичний вимикач QF, який також забезпечує захист електродвигуна від
коротких замикань. Принципова електрична схема керування кормороздавачем
передбачає управління реверсивним електродвигуном переміщення робочого органа
за допомогою кнопкових постів SB1, SB2 з двох місць у режимі роздачі корму та видалення
відходів. У схемі передбачено ввімкнення звукового сигналу HA про початок роздачі корму та видалення відходів.
Тобто, кнопковим постом спочатку вмикається реле часу КТ1 чи КТ2, які
забезпечують витримку часу на ввімкнення електродвигуна переміщення після
подачі звукового сигналу. Зупинка двигуна переміщення робочого органа під час
роздачі корму та видалені відходів виконується автоматично кінцевими
вимикачами SQ1 та SQ2. Захист
електродвигуна від перевантажень здійснюється тепловим струмовим реле КК1. Про
подачу напруги на шафу керування сигналізує лампа HL.
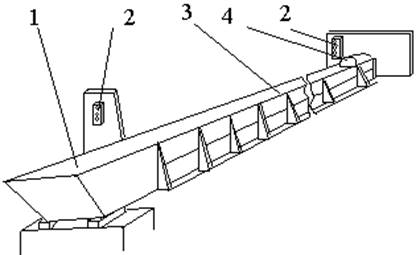
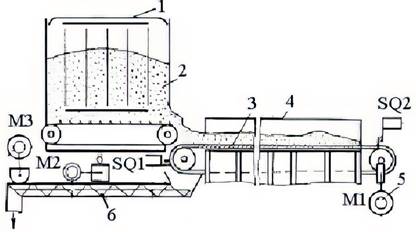
Автоматизована потокова
лінія роздачі кормів ТВК-80Б призначена для роздавання всіх видів кормів (крім концентрованих і рідких) в умовах прив’язного утримання тварин. Це рухома стрічка, (рис. 2.3.4) у годівницях 4,
що приводитися в дію реверсивним електроприводом 5. Під час руху вперед
стрічка несе до місця стійла тварин завантажене живильником 1 визначену
кількість корму. Як живильник може бути використаний кормороздавач КТУ-10, що
має накопичувальну ємність 2. З поверненням стрічки (реверс) годівниці
самоочищаються від залишків корму, що видаляється з приміщення транспортером
6.
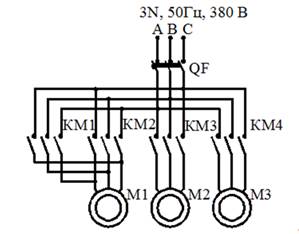
Рис. 2.3.5. Принципова
електрична схема керування кормороздавачем ТВК-80Б
Технологічна лінія роздачі корму з кормороздавачем ТВК-80Б і стаціонарним
роздавальником КТУ-10 може функціонувати в автоматичному режимі. Для роздачі
кормів упродовж доби використовують добове програмне реле КТ2 типу 2РВМ чи аналогічне, котре
встановлюють відповідно до розрахункової діаграми годівлі, кормороздавальною
лінією, відповідно до принципової електричної схеми (рис. 2.3.5), керують
вручну або автоматично в наступному порядку: спочатку контактом програмного
пристрою КТ2:1 вмикаються
магнітні пускачі КМ2 і КМЗ повернення стрічки транспортера
відходів. У передньому положенні стрічки кормороздавача кінцевий вимикач SQ1 зупиняє її рух і вимикає транспортер відходів через контакт КМ2:2. За командою програмного реле
контактами КТ2:2 вмикається
привод живильника КМ4 і
привод роздачі корму КМ1.
Наприкінці роздачі кінцевий вимикач SQ2 вимикає КМ4 з витримкою часу КМ1. Автоматична
ідентифікація тварин під час індивідуальної годівлі Особливість
розглянутих в цьому розділі пристроїв – їх непридатність для індивідуальної роздачі
кормів. У той же час індивідуальна роздача кормів, особливо концентрованих,
має значні переваги, такі, як економна витрата корму і збільшення
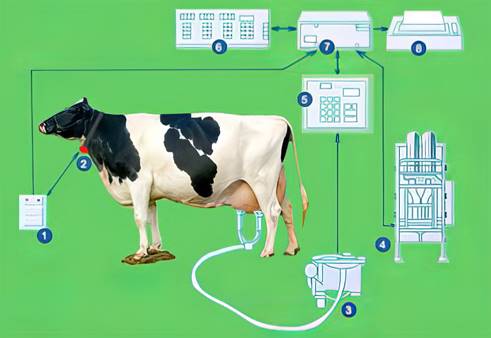
продуктивності тварин на 10–15 %. Найпоширеніша
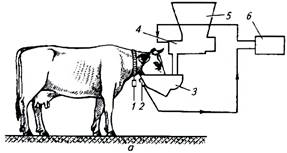
індивідуальна роздача кормів на доїльному майданчику (рис 2.3.6).
Рис.
2.3.6. Схема автоматизованої системи годівлі корів: 1 – приймач-передавач; 2 – нашийник з
електронною биркою; 3 – лічильник молока; 4 – автоматична кормова станція; 5 – термінал
для введення даних і контролю доїння; 6 – набірне поле для роботи з терміналом; 7 – процесор; 8 – друкувальний пристрій Існують також системи роздачі кормів в корівниках з використанням спеціальних
автоматичних кормових станцій. Управління цими системами може бути
ручне, програмоване або автоматичне. Системи
дозування кормів у місцях утримання тварин рекомендуються для
високопродуктивних корів.
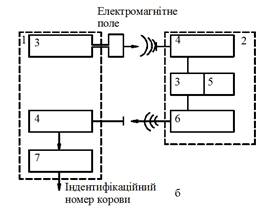
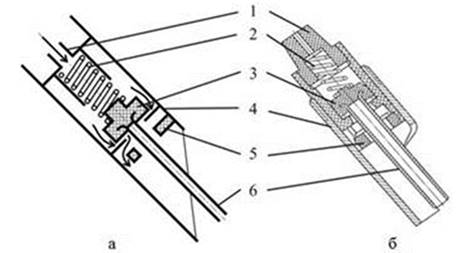
Рис. 2.3.7. Автоматизована система
індивідуального годування ВРХ: а – технологічна схема системи: 1 – передавач; 2 –
приймально-передаючий пристрій; 3 – кормушка; 4 – дозатор; 5 – бункер; 6 –
мікроЕОМ; б – функціональна схема: 1 – ідентифікуючий
пристрій; 2 – транспортер; 3 – генератор
електромагнітних хвиль; 4 – приймальний пристрій; 5 – блок пам'яті; 6 – передаючий пристрій; 7
– декодуючий пристрій Автоматичну
ідентифікацію тварин здійснюють за допомогою радіотехнічного пристрою – датчика, закріплюваного у вусі
або на спеціальному ошийнику (рис. 2.3.7а). Найвдалішою конструкцією такого датчика
є передавач, об'єднуючий в одному корпусі приймальний і передаючий пристрої
(рис. 3.2.7б). Живлення схеми передавача здійснюється через приймальну
феритову антену від генератора, що входить до складу ідентифікуючого
пристрою. Передавальний пристрій виробляє послідовність імпульсів відповідно
до індивідуального коду, закладеного в пам'яті передавача. Цей сигнал
випромінюється передавальним пристроєм на фіксованій частоті, приймається
ідентифікуючим пристроєм, декодується і використовується управляючим
пристроєм системи автоматичного годування як ідентифікатор тварини. Мобільний
електрифікований кормороздавач КСП-0,8 призначений для
нормованого роздавання кормів у свинарниках-маточниках свиноматкам та
поросятам-сисунам. Зазначені кормороздавачі за допомогою транспортерів чи
транспортних засобів завантажуються кормами, що надходять з кормоцеху в
готовому вигляді. За
принципом роздачі кормів зазначені кормороздавачі майже аналогічні.
Крім того, до складу кормороздавача входять лопатева мішалка, вивантажувальні
шнеки. Бункер
зварної конструкції, складається із середньої циліндричної частини, а
також верхньої і нижньої частин, виконаних: у
формі зрізаних конусів. Всередині бункера розміщені лопатева мішалка. Днище має
вивантажувальні вікна, які перекриваються
заслінками. До днища кріпляться вивантажувальні
шнеки. Для запобігання підтікання корму
вивантажувальний пристрій обладнаний спеціальним ущільненням. Переміщення заслінки в напрямних пристроях здійснюється штурвалом через шестерню і зубчасту
рейку. Привод візка
кормороздавача здійснюється
від мотор-редуктора через ланцюгову
передачу, привод мішалки – від
мотор-редуктора через розподільну коробку, а
приводи вивантажувальних шнеків –
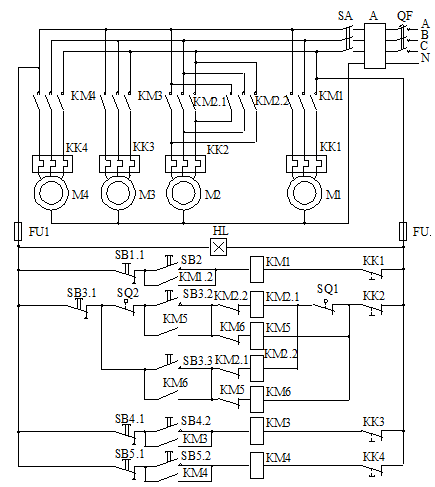
клинопасовими передачами. Принципову електричну схему кормороздавача КС–1,5 зображено на рис.
2.3.9. На вводі кабелю живлення кормороздавача встановлено захисний пристрій
для вимикання SF типу ЗОУП-25, що призначений для захисту людей і
тварин від ураження електричним струмом, захисту ізоляції електроустаткування
від неприпустимих струмів витоку через неї на землю, а також від струмів
витоку, що виникають під час несиметричних коротких замикань на землю. Під час увімкнених пристроїв SF та автоматичного вимикачаQF загоряється лампа світлосигнальної арматури HL, яка сигналізує про наявність напруги в ланцюзі
керування. Потім вмикається пакетно-кулачковий вимикач SA. Під час натискання кнопки SB2 замикається ланцюг магнітного пускача КМ1 і
запускається електродвигун змішувача M1. Кнопкою SB3.2 подається напруга на котушку реверсивного
магнітного пускача КМ2.1 і котушку пускача КМ5, яку використовують
як проміжне реле. При цьому запускається електродвигун ходової частини
(візка) кормороздавача М2 для руху кормороздавача уздовж годівниць вперед.
Кнопкою SB4.2 вмикають
електродвигун першого шнека М3 або кнопкою SB5.2 вмикають електродвигун другого шнека М4 залежно від
того, на яку сторону вивантажується корм. За двосторонньої роздачі корму
вмикають обидва шнеки. Під час натискання педалі гальма розмикаються контакти кінцевого вимикача
SQ1, вимикається тяговий електродвигун М2 і під дією
гальма та сил опору руху кормороздавач майже миттєво зупиняється. Під час
відпускання педалі гальма контакти SQ1 знову замикаються і відбувається миттєве вмикання
тягового електродвигуна М2 без додаткового натискання кнопки SB3.2 чи SB3.3 і рух відбувається в ту сторону, у яку рухався
кормороздавач до натискання педалі гальма. У даному випадку кормороздавач рухався вперед, пускач КМ5 залишався під
напругою і його контактами кнопка пуску SB3.2 буде заблокована. Якщо на шляху руху вперед зустрінеться перешкода, то під його дією
пристрій, що знаходиться попереду кормороздавача, діє на кінцевий вимикач SQ2, розмикаючи його контакти і автоматично зупиняючи
кормороздавач. Після спорожнювання бункера кнопкою SB3.1 зупиняють
тяговий електродвигун М2, привод вивантажувальних шнеків вимикають кнопками SB4.1 і SB5.1, а потім
тяговий двигун кормороздавача М2 перемикають на зворотний хід кнопкою SB3.3. Кормороздавач вологих
кормосумішей КВК-Ф-15 (ТУ 105-3-1134-86) призначений для дозованого роздавання
кормосуміші вологістю
65–75% з розмірами часток
не більше
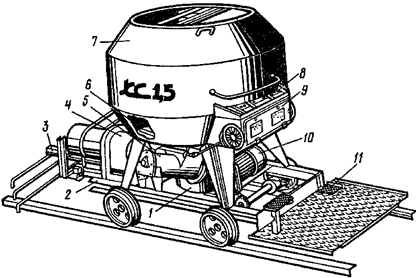
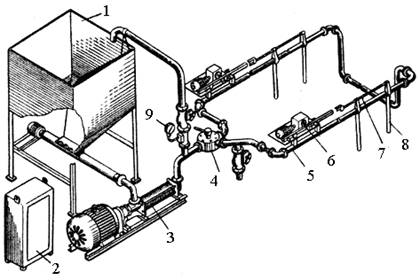
Рис. 2.3.10. Загальний вигляд кормороздавача вологих кормосумішей КВК-Ф-15: 1 –
бункер-живильник; 2 – шафа керування; 3 – електронасосний агрегат 4 –
перемикач; 5 – кормопровід; 6 – механізм відкривання клапанів; 7 –
напрямна; 8 – відвід; 9 – електроконтактний манометр Кормороздавач
складається (рис. 2.3.10) із
бункера-живильника 1, шафи
керування 2, електронасосного
агрегату 3, перемикача потоків 4, кормопроводу 5, механізму відкривання клапанів 6, напрямної 7,
відводів 8 та електроконтактного
манометра 9. Електронасосний агрегат ІВ 20/10 поєднує в собі електродвигун, проміжний
корпус і гвинтовий насос. Перемикач потоку – це триходовий кран, який складається з корпусу, кришок
та барабана. Кормопровід
виготовлений із стальної труби діаметром Випускний клапан –
це пластмасовий конус з жорстко закріпленим співвісним йому тросом, на якому
фіксується упор.
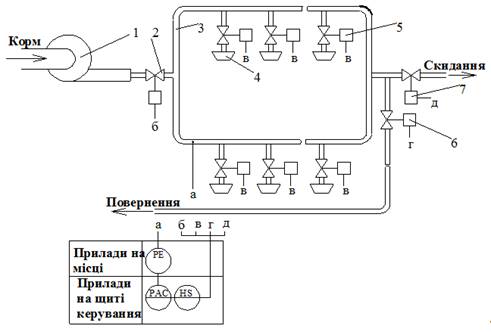
Рис. 2.3.11. Функціональна схема автоматизації кормороздавальної
гідравлічної системи: 1 – гідронасос; 2 – головний клапан; 3 –
лінія кормороздачі; 4 – годівниця; 5 – місцевий клапан дозування; 6 – клапан
повернення; 7 – клапан скидання
Рис. 2.3.12. Функціонально-технологічна схема тросово-шайбового
кормороздавача Кормороздавач складається з тросошайбового кармороздавача 10,
бункера сухих кормів БСК, в якому знаходяться датчики рівня 1, 2, натяжного
пристрою 5 (рис. 2.3.15),
електродвигуна 4 з редуктором 3, годівниць 8 з дозаторами 9 (рис. 2.3.14).
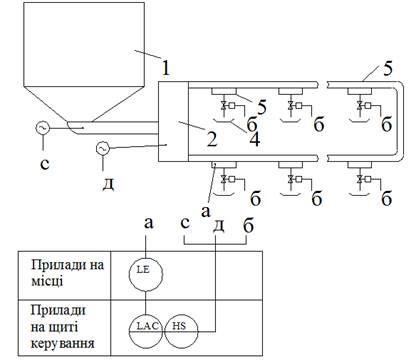
Рис. 2.3.13. Технологічна схема тросошайбового
кормороздавача: 1 –
датчики рівня в бункері (повний і допустимий рівень); 2 – датчик нижнього
рівня; 3 – редуктор; 4 – електродвигун; 5 – натяжний пристрій; 6 – кінцевий
вимикач; 7 –
датчик рівня в годівниці; 8 – годівниця; 9 – дозатор годівниці; 10 –
тросошайбовий кормороздавач Згідно з технологічною схемою автоматизації (рис.
2.3.13) управління роздачею кормів здійснюється так: з бункера БСК 1, що
знаходиться поза тваринницьким приміщенням, корм переміщується по
кормопроводу тросово-шайбовим транспортером 10. Через отвори в кормопроводі
комбікорм просипається в індивідуальні (групові) дозатори 9. В останньому
індивідуальному дозаторі встановлено датчик рівня 7. Видача корму виконується
за командою від програмного пристрою в установлений час, шляхом увімкнення
електродвигуна 4 приводу кормороздавача. Контроль рівня кормів у бункері
контролюється за допомогою датчиків рівня 1,2, а наявність корму в дозаторі
останньої годівниці датчиком 7. Натяг тросу кормороздавача контролюється
кінцевим вимикачем 6. Замість троса з шайбами, може використовуватись ланцюг,
на якому закріплені шайби (рис. 2.3.15).
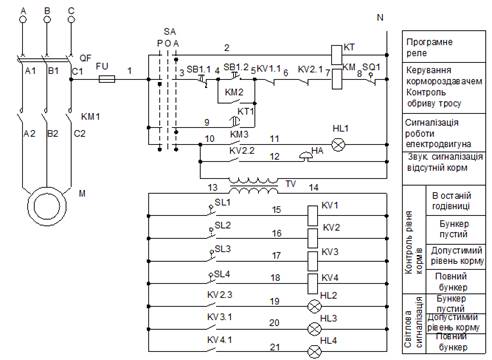
Принципову
електричну схему тросошайбового кормороздавача для роздачі комбікормів
зображено на рис. 2.3.16. Робота
кормороздавача передбачена в двох режимах, ручному і автоматичному. Режими
задаються перемикачем SА. У ручному режимі перемикач встановлюється в положення «Р». Вмикання
електродвигуна кормороздавача здійснюється за допомогою кнопки SВ1.2., під час натискання якої подається напруга на
котушку магнітного пускача КМ, який силовими контактами вмикає і подає
напругу на електродвигун, а додатковими контактами КМ1 блокує кнопку SВ1.2. Сигналізація роботи електродвигуна
здійснюється за допомогою лампочки НL1.
Рис. 2.3.16. Принципова електрична схема тросошайбового
кормороздавача Вимикання
електродвигуна кормороздавача в ручному режимі здійснюється кнопкою SВ1.1. В
автоматичному режимі перемикач SА встановлюється в положення «А». У цьому положенні перемикача отримає
живлення котушка програмного реле часу КТ, яке своїми контактами КТ1 подає
живлення на котушку магнітного пускача КМ електродвигуна кормороздавача М.
Під час заповнення кормом останньої годівниці спрацьовує контактний датчик
рівня SL1, який подає напругу на котушку проміжного реле КV1. Контакти реле КV1.1 розмикаються в колі котушки КМ, що призводить до
вимикання магнітного пускача і електродвигуна кормороздавача М. Коли закінчуються корми в бункері контактний датчик
рівня SL2 подає напругу на котушку проміжного реле КV2, яке своїми контактами КV2.1 вимикає магнітний пускач і електродвигун
кормороздавача М. Контакти реле КV2.2 подають напругу на дзвінок НА, для повідомлення персоналу
про відсутність кормів у бункері. Контакти реле КV2.3 подають напругу на сигнальну лампу НL2, яка сигналізує про закінчення кормів у бункері. Контактний датчик
рівня SL3 подає напругу на котушку проміжного реле КV3, який своїми контактами вмикає сигнальну лампу НL3. Вона сигналізує про достатній рівень корму в бункері
для добової годівлі тварин. Про заповнений
бункер кормом здійснює сигналізацію контактний датчик рівня SL4, який за допомогою проміжного реле КV4 вмикає сигнальну лампу HL4. Кінцевий вимикач SQ контролює натяг тросу кормороздавача. Під час
ослаблення або обриву контакти SQ розмикаються, магнітний пускач КМ вимикається і
вимикається електродвигун приводу кормороздавача М. Спіральні кормороздавачі використовують за ненормованих
видачах сипких кормів у свинарниках. За будовою вони схожі до
тросово-шайбових. Добова норма видачі кормів зберігається, як і в попередній
системі в бункерах БСК. З бункера БСК до проміжного бункера та дозаторів по
трубопроводах корм подається спіральними транспортерами.
Роздача кормів у птахівництві значною мірою залежить від способів утримання птахів.
·
підлогови; ·
клітковий;
· комбінований. Під
час підлогового утримання птахи утримуються на підлозі пташника з можливим вигулом або без
нього. За такого утриманя значні затрати
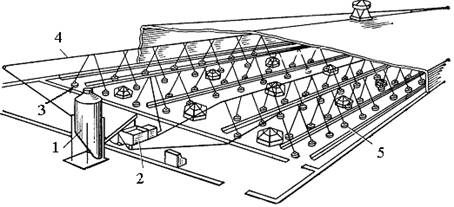
праці і обмежена концентрація поголів'я. На рис. 2.3.17 зображено технологічну лінію роздачі
кормів під час безвигульного підлогового утримання птахів. Така технологія
характерна при використанні тросово-шайбових та спіральних транспортерів
кормороздачі.
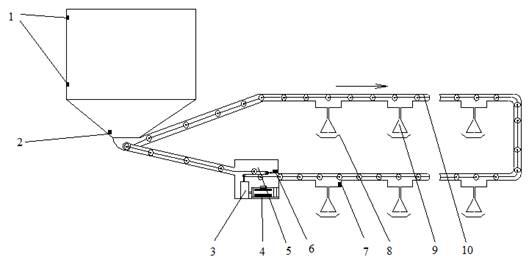
Рис. 2.3.17. Технологічна лінія роздачі кормів при
безвигульному підлоговому утриманні птахів: 1 –
бункер для зберігання кормів БСК; 2 – бункер дозатор; 3, 5 – годівниці; 4 –
кормопровід Під час кліткового
утримання птахів розміщують у кліткових батареях, які
складаються з кількох ярусів кліток. У кожну клітку вміщують по 3–10 курей або 10–60 курчат.
Рис. 2.3.18. Обладнання роздачі кормів в кліткових
батареях з ланцюговим транспортером в середині жолобкової годівниці: 1 – установка для поздовжнього прибирання посліду; 2 –
кліткова секція; 3 – жолобкова годівниця з ланцюговим транспортером; 4 –
бункери-дозатори кліткової батареї; 5 – транспортер шнековий; 6 – бункер
зберігання сухих кормів; 7 – елеватор для яєць; 8 – зрівнювальний бачок; 9 – установка для поперечного видалення посліду Комбіноване вирощування полягає в тому, що курчата до 1,5-2-місячного
віку утримуються в клітках з обігрівом, а потім їх переводять на підлогове
утримання в легких приміщеннях, що не опалюються. Такий спосіб застосовують на невеликих птахофабриках.
Для годівлі птахів застосовують збалансовані за вмістом
живильних речовин гранульовані або розсипні комбікорми. Пташники, як правило,
комплектують одновіковою і рівнозначною за продуктивними властивостями групою
птахів. Для годівлі птахів застосовують жолобкові годівниці і бункерні
автогодівниці різної конструкції. Обладнання роздачі
корму під час утримання в кліткових батареях складається з зовнішнього бункера 6 зберігання та
видачі сухих кормів; розподільного транспортера 5 подачі кормів від зовнішнього
бункера в бункери-дозатори 4 рядів батарей; засобів розподілу корму в
жолобкові годівниці. Як засоби розподілу корму в жолобкові годівниці для
даного варіанту кормороздачі є ланцюгові транспортери 10. При цьому корм з
нерухомих бункерів-дозаторів подається на ланцюговий транспортер, що
переміщується всередині годівниці. Автоматизація кормороздачі в цьому випадку
зводиться до програмного керування періодичністю видачі кормів, контролю
рівня корму в бункерах дозаторах та керування розподілом кормів у жолобкових
годівницях. Автоматизація лінії кормороздачі комплекту обладнання
БКМ-3. Комплект
обладнання БКМ-3 призначений для кліткового утримання молодняку
курей-несучок.
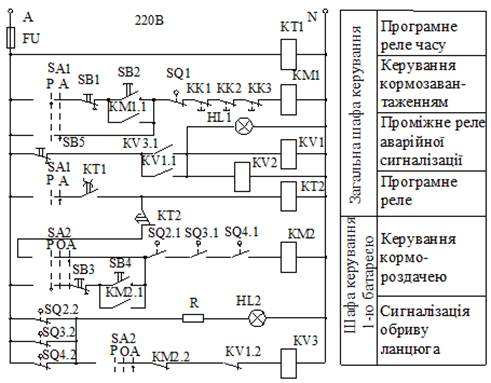
Принципову
електричну схему керування завантаження бункерів кліткових батарей БКМ-3 і кормороздачею
першої батареї наведено на рис. 2.3.19. Схеми
керування кормороздачею у всіх інших батареях аналогічні першій. Апарати
лінії кормозавантаження (КТ1, КМ1, KV2, КТ2, HL1) знаходяться в загальному ящику керування.
Апарати керування лінією кормороздачі (для першої батареї – КМ2, KV3, HL2)
розміщені в ящику керування відповідної батареї. У коло керування пускачем
КМ1, який вмикає і вимикає всі електродвигуни лінії завантаження кормів,
увімкнені контакти теплових реле КК1–КК3 електродвигунів похилого і
горизонтального транспортерів.
Для роботи в ручному
режимі перемикачі SA1 і SA2 ставлять у положення «Р». Транспортери
кормозавантаження вмикають кнопкою SB2. Вимикається двигун транспортера після заповнення
бункера останньої батареї кінцевим вимикачем SQ1 або натисканням кнопки SB1. Двигун кормороздачі першої батареї вмикається і
вимикається натисканням кнопок SB3 і SB4. Під час обриву
ланцюга кормороздавача двигун його привода вимикається контактами вимикачів
обриву ланцюга SQ2.1– SQ4.1, а контактами SQ2.2–SQ4..2 вмикаються сигнальні лампи в ящику керування
батареєю та в залі. В автоматичному режимі перемикачі SA1 і SA2 ставлять у положення «А». Механізми кормозавантаження
вмикаються і вимикаються контактом кінцевого вимикача SQ1, що розміщений на бункері останньої кліткової батареї.
Під час його заповнення подається команда на зупинку двигунів транспортерів. Команди на
вмикання транспортерів кормороздавачів подаються від програмного пристрою
КТ1, відповідно до технологічних режимів годівлі. Під час замикання контакту
КТ1 через розмикаючий контакт КТ2 другого реле часу відбувається автоматичний
запуск двигунів кормороздавачів всіх кліткових батарей. Витримка часу реле
КТ2 дорівнює тривалості кормороздачі батареї. У випадку обриву
ланцюга кормороздавача на будь-якому ярусі кліткової батареї перемикаються
контакти одного з кінцевих вимикачів SQ2–SQ4. При цьому вимикається електромагнітний пускач
ланцюгового транспортера КМ2, а реле KV3 – вмикається. Контакт KV3.1 замикає коло обмоток реле KV1 і KV2, які своїми контактами вмикають сигнальну лампу HL1 у залі та лампу сигналізації батарей (на схемі не
зображено). Для зняття сигналу в залі перемикач SA2 ставлять у положення «О» і натискають кнопку SB5. Автоматизація лінії кормороздачі
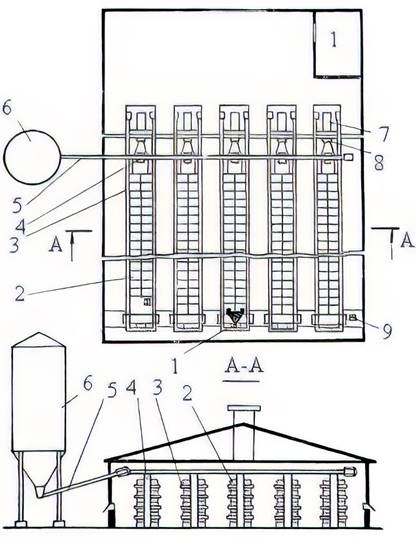
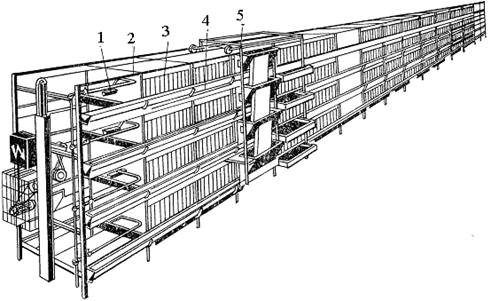
комплектом обладнання КБН. Зовнішній вигляд багатоярусних
кліткових батарей типу КБН наведено на рис. 2.3.20. Як і в попередньому
варіанті сухий корм до пташників підвозять спеціальним автокормовозом-завантажувачем і заповнюють бункер
типу БСК-10 для зберігання сухих кормів. Похилим шнековим транспортером і
горизонтальним поперечним транспортером корм подається до приймальних
бункерів навісних кормороздавачів двобічної дії. На відміну від попередніх
(стаціонарних бункерів-дозаторів), наповнені навісні бункери-дозатори
переміщуються вздовж кліткової батареї і вивантажують корм у жолобкову
годівницю. Одночасно з кормороздачею здійснюється прибирання посліду під
кожним ярусом кліткової батареї.
Рис. 2.3.20. Кліткова
батарея КБН для утримання курей-несучок: 1 – напувалки; 2 – каркас:
3 – клітка; 4 – годівниця; 5 – кормороздавач Рухомі
бункери-дозатори кормороздачі та скребки для видалення посліду приводяться у
дію від електродвигуна M1 потужністю 0,6 кВт через редуктор та систему передач. Під час зворотного
руху роздавача корм продовжує заповнювати годівниці, а скребки для видалення
посліду здійснюють холостий хід. У кінці пташника встановлено транспортер,
який видаляє послід за межі будівлі з одночасним завантаженням у транспортні
засоби. Принципова схема
керування роздаванням корму і прибирання посліду (рис. 2.3.20) може працювати
у «Ручному» та «Автоматичному» режимах. У «Ручному» режимі керування
електродвигунами M1, M2, М3 відбувається
за допомогою відповідних кнопок «Пуск» та «Стоп» (SB1, SB2B, SB2H, SB3).
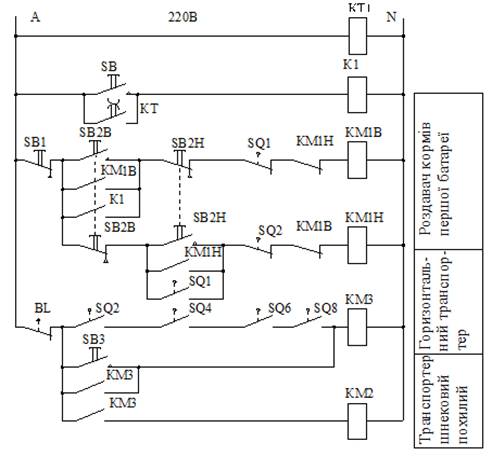
Рис. 2.3.21. Принципова
електрична схема керування електроприводом роздавання корму на птахофермах з
комплектом обладнання КБН Під час
«Автоматичного» керування вмикання роздавача здійснюється програмним реле часу КТ. У вихідному
положенні кормороздавачів контакти кінцевих вимикачів SQ4, SQ5, SQ6, SQ7 будуть замкнені. Якщо приймальні бункери-дозатори
останнього роздавача не заповнені кормом, то контакти фотореле BL замкнені і котушка магнітного пускача КМ3 одержує
живлення та вмикає двигун М3 горизонтального скребкового транспортера.
Одночасно замикаючі контакти КМ3 подають напругу на котушку пускача КМ2, який
вмикає двигун M2 привода похилого шнекового транспортера. Під час роботи
завантажувальної лінії йде почергове заповнення бункерів кормороздавачів,
починаючи з першого. Після заповнення останнього бункера розмикаються
контакти фотореле BL і двигуни M2 та М3 заповнення бункерів дозаторів зупиняються. У визначений час
контакти програмного реле часу КТ замикаються, вмикається проміжне реле К1.
Замикаючі контакти К1 подають напругу на котушку магнітних пускачів КМ1В
(КМ2В, КМЗВ, КМ4В), які вмикають електродвигуни М1А (М1Б, М1В, М1Г) навісних
роздавачів, і всі роздавачі починають переміщуватися вздовж пташника і
роздавати корм. На принциповій
електричній схемі зображено лише кола керування електродвигуна M1 кормороздавача А (КМ1В). Аналогічно йде керування
роздавачами Б, В, Г. Одночасно з
роздаванням корму йде прибирання посліду. Коли роздавач доходить до кінця
приміщення, упори скребків четвертих ярусів натискають на кінцеві вимикачі SQ1, SQ3, SQ5, SQ7 і привод здійснює реверс. Під час зворотного
руху роздавання кормів у годівниці триває. У вихідному положенні упори скребків
третього ярусу натискають на кінцеві вимикачі SQ2, SQ4, SQ6, SQ8, кормороздавачі вимикаються для підготовки до
наступного завантаження кормами. На
тваринницьких фермах, пасовищах і за табірних умов утримання тварин
використовують різні способи напування тварин.
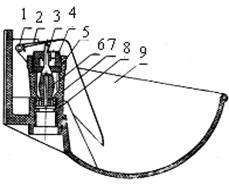
Одночашечна
стаціонарна автоматична поїлка АП-1 (рис. 2.3.22) призначена для напування ВРХ за прив’язного
утримання тварин і розрахована для обслуговування двох тварин. Напувалка АП-1 складається з чаші 9, клапана 3 і важеля 2 з віссю 1. Клапанний пристрій напувалки
складається з притискача 4, сідла 5, клапана 3, амортизатора 6 і
корпусу 7. Гумовий амортизатор 6 діє на клапан 3 і щільно закриває вихідний отвір у гумовому сідлі 5. При цьому важіль 2, спираючись на кінець стержня
клапана, що виступає назовні, піднімається над дном чаші 9. Поїлка наповнюється водою з водопровідної
мережі за тиску 0,04–0,20 МПа.
Оскільки у чаші
завжди залишається трохи води, тварина, намагаючись напитися, натискує на
важіль і тим самим відкриває клапан. Вода під дією напору надходить у чашу
напувалки через отвори у нарізній пробці – притискачі 4. Важіль 2 і клапан 3 під дією амортизатора повертається у
попереднє положення, і надходження води у чашу напувалки припиняється. Деталі
напувалки, крім сідла, амортизатора і осі, виготовлені з пластмаси. Автоматичну
напувалку АП-1 можна встановити у будь-якому корівнику, де є водопровідна
мережа або місткість для води. Її встановлюють на висоті 50–
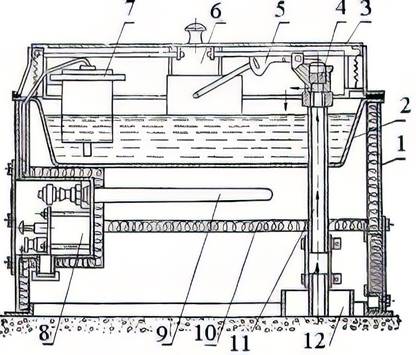
Групові поїлки АГК-4 (рис. 2.3.23) використовують для напування ВРХ під час безприв’язногоу
утримання на вигульних майданчиках. Поїлка дозволяє одночасно обслуговувати
чотири тварини. Корпус 1 напувалки виготовлений з листової сталі. Він має
всередині теплову ізоляцію 10. Напувалка складається з напувальної чаші 2 з кришкою 3, камери підігріву
повітря, камери з поплавковим клапанним механізмом 5, електронагрівника 9
(потужністю 0,8 кВт при напрузі 220В) і підвідної труби 11. У стінці корпусу
передбачене вікно для підключення автонапувалки до водопровідної мережі, яка
закривається монтажною кришкою з написом: «Підведення води». До дна чаші
приварено стояк клапанно-поплавкового механізму і зливну трубку, що виходить
за межі корпусу. Клапанно-поплавковий
механізм використовують для підтримання постійного рівня води у чаші.
Підтримання температури води в межах 10–18°С здійснюється терморегулятором
манометричного типу. Його використовують для вмикання нагрівника в діапазоні
заданої температури. Поїлка стаціонарна з
самоочищенням ПСС-1 (рис. 2.3.24) призначена для напування свиней з
одночасним очищенням від корму і бруду. Вона складається з чавунного корпуса
з чашею, з’єднаного з водопровідною мережею. Подача води в чашу здійснюється
як і в автонапувалці АП-1 за
допомогою важільно-клапанного механізму.
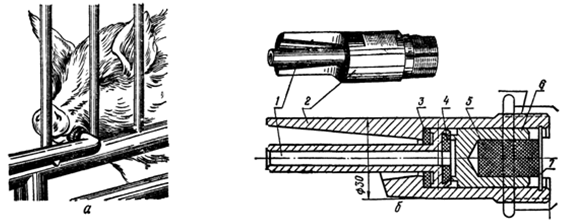
Рис. 2.3.25 Соскова поїлка
ПБС-1: а –
процес напування; б – будова поїлки: 1 – сосок; 2 – корпус; 3, 4 – ущільнювачі; 5 –
амортизатор; 6 – клапан; 7 – упор Поїлка ПБС-1 (рис. 2.3.25) призначена для напування свиней. Діє
поїлка наступним чином: тварина поглинає в рот сосок з носком і притискає
сосок. Під час натискання на сосок 1,
він переміщується до носка корпусу 2
і клапан 5 відкриває подачу води через
зазор, що утворюється між корпусом і ним. У рот тварини вода потрапляє через
сосок. Під час відпускання соска клапан під дією амортизатора повертається у
вихідне положення. Соскова напувалка
типу АС-Ф-25 призначена для напування молодняку і дорослого поголів’я свиней.
Під час напування
тварина забирає сосок разом із носком корпусу і стискає їх. При цьому сосок
переміщується до зіткнення із носком корпусу, а між ущільненням у соску і
кільцевим пояском клапану утворюється щілина, через яку вода поступає
безпосередньо у рот тварини. Коли вона нап'ється і випустить із рота сосок,
той під дією тиску води повернеться в початкове положення, і надходження води
в напувалку припиниться. Під час тиску в системі від 0,08 до 0,35 МПа витрата
напувалки складає 1,33 л/с. Одна соскова напувалка розрахована на
обслуговування 20–30 свиней. Серед чашкових
напувалок зустрічаються напувалки МР 8, МР 10, та моделі 95 U.
Технологічний процес напування птахів має свої
специфічні особливості, які обумовлені властивостями організму птахів та способом
їх утримання.
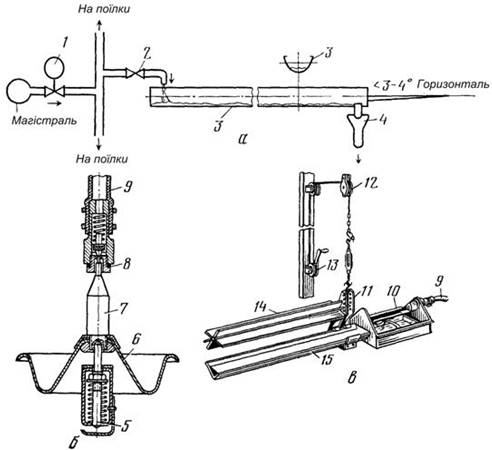
Рис. 2.3.29. Автопоїлки для птахів: а –
проточна жолобкова; б – групова чашечна; в – непроточна жолобкова; 1 – електромагнітний клапан; 2 – вентиль ручного
регулювання; 3 – поїлки; 4 – трубопровід каналізації; 5 – шток; 6 – чаша; 7 –
підвіска; 8 – клапанний механізм; 9 – шланг водогону; 10 – поплавкова камера;
11 – штанга; 12 – блок; 13 – барабан лебідки; 14 – огорожа для очищення від
кормів; 15 – жолоб поїлки Під час утримання птахів
у кліткових батареях використовують проточні жолобкові
автопоїлки (рис. 2.3.29а). Принцип керування такою системою полягає в
автоматичному вмиканні і вимиканні електромагнітного клапана подачі води 1 на поїлки 3 за допомогою програмного пристрою. Ця система напування птахів
має суттєві недоліки: витрати води в них в 3–3,5 раза перевищують споживання;
значні затрати праці на очищення. Групові чашечні (рис. 2.3.29б) та непроточні
жолобкові (рис. 2.3.29в) поїлки використовують під час утримання птахів на підлозі та в кліткових батареях
горизонтального типу. У цих поїлках управління подачею води здійснюється
регуляторами прямої дії з клапанним механізмом.
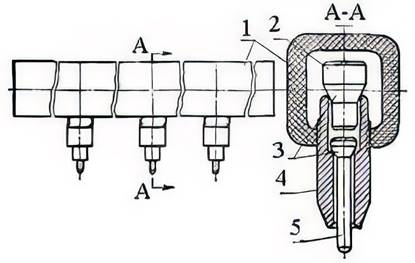
Ніпельні поїлки використовують (рис. 2.3.30, 2.3.31) за різних умов утримання птахів.
У системах напування з ніпельними поїлками вода з водопровідної мережі подається
в бачки. Рівень води в бачках підтримується поплавково-клапанними
регуляторами рівня прямої. Через поліетиленові труби вода подається на
магістраль з ніпельними поїлками. У магістралі напування надлишковий тиск
води становить 0,34 МПа. Він залежить від рівня води в бачку і є однією із
головних вимог нормальної роботи поїлок. Вона складається з корпусу, в якому
є два клапани – верхній та нижній.
Схема роботи ніпельної поїлки
Процес напування птиці за допомогою ніпельної поїлки
Робота поїлки полягає в тому, що за рахунок
притирання фасок 3 клапанів 2 та 5 на кінці стержня клапана 5 зберігається
крапля води. Коли птах клює її, відбувається дія на клапан 5 та 2 і це
призводить до швидкої появи нової краплі. Для усунення витрат води під
ніпельними поїлками можуть встановлювати чаші. Крім
крапельних напувалок у птахівництві в кліткових батареях застосовують
жолобкові напувалки для курчат віком від 1 до 30 діб, мікрочашові для
дорослої птиці та вакуумні (рис. 2.3.32). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||