|
|
|
АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ І СИСТЕМИ АВТОМАТИЧНОГО КЕРУВАННЯ Електронний
посібник |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2. АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ
ПРОЦЕСІВ У ТВАРИННИЦТВІ ТА ПТАХІВНИЦТВІ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.1. Автоматизація
установок водопостачання 2.1.1. Технологічні
основи автоматизації водонасосних установок 2.1.2. Автоматизація
безбаштових насосних установок 2.1.3. Автоматизація
баштових водонасосних установок 2.1.4. Безконтактні
станції керування насосними агрегатами 2.1.5.
Автоматизація водонасосних установок з використанням мікроконтролерів 2.1.6. Автоматизація
водопостачання з використанням частотних перетворювачів 2.1.7. Автоматизація
перекачування стічних вод 2.1.8. Автоматизація
зрошувальних установок У сільському господарстві воду використовують для потреб населення і напування
тварин, (рис. 2.1.1) приготування їжі і кормів, поливу рослин, гасіння пожеж
і для інших виробничих цілей.
Для підйому і роздачі води застосовують водонасосні
установки, що складаються з водоприймачів, очисних споруд, резервуарів чистої
води або водонапірних
башт, сполучної водопровідної мережі і електронасосів із станціями
управління. Найпоширеніші в сільському господарстві відцентрові і осьові
насоси. Їх виконують у моноблоці з електродвигунами і занурюють у воду, в трубчасті колодязі діаметром 100–250 мм (заглибні
насоси) або розташовують на поверхні землі. Є заглибні насоси з
електродвигунами, які розташовані в свердловині. Ці насоси називають
артезіанськими (рис. 2.1.2.).
Для підйому води з
відкритих водоймищ і шахтних колодязів застосовують також плаваючі
відцентрові насоси. Широко розповсюджені так звані об'ємно-інерційні насоси з
електромагнітним вібраційним приводом. Ці насоси мають малу подачу води (до 1
м3/ч за напору У сільському
господарстві застосовують водонасосні установки трьох типів: баштові з
водонапірним баком, водонасосних установок з гідроакумулятором і з
безпосередньою подачею води у водонапірну мережу. Майже в 90 % випадків
використовують баштові водонасосні установки з витратою води до 30 м3/ч.
Якщо витрата води складає 30–65 м3/ч, то рекомендують двоагрегатні
насосні станції з гідроакумулятором. За витрати води понад 65 м3/ч
економічно доцільно використовувати насосні установки з безпосередньою
подачею води в розподільну мережу (зрошувальну систему). Максимальні щогодинні витрати води на об’єкті мають не перевищувати
подачі насоса у робочій зоні. Як водозабірні пристрої безбаштових водонасосних
установок використовують трубчасті колодязі (для свердловинних
електронасосних агрегатів), або відкриті водойми, шахтні та трубчасті
колодязі (для відцентрових консольних насосів).
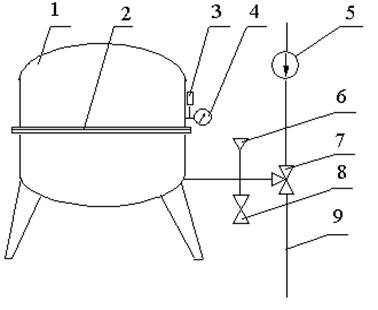
Під час використання водонасосних установок з
гідроакумулятором (рис. 2.1.4) вода
з водозабірного пристрою насосом 5 подається на споживача. На відгалуженні
трубопроводу встановлено гідроакумулятор 1 (двокамерний бак), верхня і нижня
камери якого розподілені гумовою мембраною 2. Верхня камера гідроакумулятора
попередньо заповнюється повітрям до тиску Р1 – тиск увімкнення
насоса. Нижня камера з’єднана з трубопроводом. Під час
споживання води, коли тиск в системі менше за величини Р1,
відбувається ввімкнення електронасоса. Коли споживання зменшується, вода
заповнює нижню камеру гідроакумулятора і тиск повітряної подушки зростає до
значення вимкнення насосного агрегату Р2. Під час відновлення
споживання, вода до споживача потрапляє під тиском повітря, що знаходиться
над мембраною і цикл роботи водонасосної установки повторюється.
В безбаштових
водонасосних установках з об’ємом бака Для ефективної роботи водонасосної установки,
так як споживання води сільськогосподарських об’єктів є нерівномірним,
необхідно передбачити автоматичне керування насосом. Враховуючи будову,
принцип дії та властивості даної водонасосної установки, керування насосом
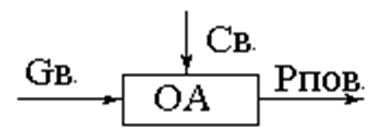
може проводитися за тиском повітря в верхній зоні гідроакумулятора. Структурна схема водонасосної установки з
гідроакумулятором як об’єкта автоматизації зображено на рис. 2.1.5.
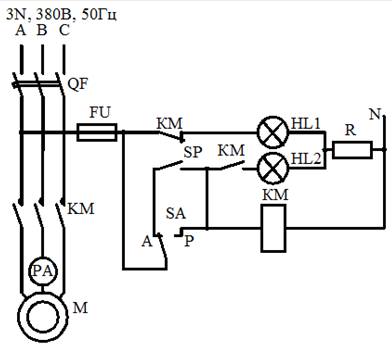
Принципова
електрична схема керування водонасосною установкою з гідроакумулятором типу
ВУ зображено на рис. 2.1.6. Підготовка установки до роботи здійснюється
автоматичним вимикачем QF. Про подачу напруги на щит керування та вимкнений стан
насоса вказує сигнальна лампа HL1. За допомогою
перемикача SA задається «Ручний» чи «Автоматичний» режими керування
установкою. В «Автоматичному»
режимі керування робота
електродвигуна М залежить від стану
контакту реле тиску SP. Під час споживання води, коли тиск в системі менше по
величині Р1 контакт SP буде в замкненому стані, відбувається ввімкнення
електромагнітного пускача КМ
електродвигуна насоса М насоса. Про
ввімкнення насоса сигналізуватиме сигнальна лампа HL2. Коли споживання
зменшується, вода заповнює нижню камеру гідроакумулятора і тиск повітряної
подушки зростає до значення вимкнення насосного агрегату Р2, контакт реле тиску SP розімкнеться і електронасос буде вимкнений. Під час
відновлення споживання, вода до споживача потрапляє під тиском повітря, що
знаходиться над мембраною і цикл роботи водонасосної установки повторюється. У «Ручному» режимі керування управління насосною установкою
здійснюється переводом перемикача SA в
положення "Р". Захист силових кіл від коротких замикань та перевантажень здійснюється автоматичним
вимикачем QF, а кіл керування запобіжником FU. Контроль струмового завантаження двигуна насоса
здійснюється амперметром РА. Ідеальна система
водопостачання має забезпечувати регулярну подачу води з постійним тиском.
Але в більшості випадків це звучить як міф. Досягти таких показників буває
практично нереально ні під час централізованої, ні індивідуальної подачі.
Перепади тиску, гідроудари, сухий хід насоса і інші неприємності здатні не
тільки створювати побутові незручності, але і можуть привести до значних
фінансових витрат. Для оптимізації роботи систем
водопостачання використовується різне обладнання.
Система
водопостачання з використанням контролера тиску працює наступним чином. Під час відкриття крана
тиск у системі водопостачання падає, а автоматичний контролер запускає насос,
після припинення подачі води апарат відключає обладнання і переходить у режим очікування. Якщо води для нормального
функціонування пристрою не вистачає, спрацьовує захист і контролер відключає
електронасос. Після того як буде усунена причина зупинки, потрібно лише
натиснути кнопку перезапуску.
·
стабілізувати тиск води розгалужених систем водопостачання, в яких воно
коливається залежно від часу доби та в момент вмикання споживачів; ·
позбутися від шуму водорозбірних кранів; ·
знизити споживання води. Всім відомо, що нижче рівень тиску, то менше
води витече під час відкриття крана; ·
захистити систему від перевантаження, щоб не нашкодити побутовій техніці,
яка підключена до водопостачання: ·
захист двигуна від «сухого ходу». Отже,
автоматичний контролер тиску – річ практично незамінна. Металеві
збірно-блочні безшатрові башти конструкції інженера А. А. Рожновського
призначені для водопостачання тваринницьких підприємств та створення
необхідного тиску в мережі в період вимкнення насоса, зберігання запасу води
та регулювання подачі споживачам на потреби.
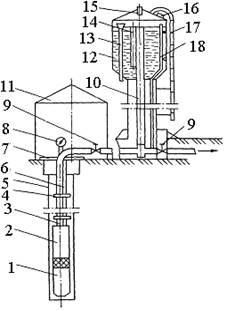
Основними
складовими баштових водонасосних установок є башта Рожновського та заглибний електронасосний агрегат. Заглибний
електродвигун 1 (рис. 2.1.8) у моноблоці з багатоступінчастим насосом 2 закріплюють
на водопідйомних трубах 3 і опускають у свердловину 5. Труби підвішують до
плити 7, встановленої в приміщенні 11. Свердловини виконують із обсадних труб
діаметром 100–450 мм. Електродвигуни виконують сухими, напівсухими і
заповненими маслом або водою. Найпоширеніші електродвигуни, заповнені водою.
Змазують гумометалеві або пластмасові підшипники також водою.
До електродвигуна підводять кабель 6, закріплений на водопідйомних
трубах хомутами 4. Всмоктувальна частина має сітку для затримання великих
домішок, що знаходяться у воді. Бак башти 12 виконують звареним з листової
сталі і встановлюють на цегельну, залізобетонну чи металеву опору. До бака
підводять напірно-розвідний трубопровід 10. Кінець напірної труби доводять до
верхнього рівня, а відвід води з бака відбувається через зворотний клапан
біля нижнього рівня. Бак з зовнішньої і внутрішньої сторони обладнують
сходами 17, 18, люком 16, вентиляційним клапаном 15, датчиками рівня 14 і
водозливною трубою 13, що виключає перенаповнення бака водою. На водопроводі
ставлять манометр 8 і засувки 9. Таким чином, у башті
постійно знаходиться запас води, який визначається об’ємом бака для води в
башті від нульової позначки до верхнього рівня. Під
час роботи баштової водонасосної установки з заглибним електронасосним
агрегатом, для агрегатів потужністю 4,5кВт і більше, використовують датчики
«сухого ходу». Датчик «сухого ходу» унеможливлює роботу агрегату, коли рівень
води в свердловині стає нижчим рівня його закріплення на напірному
трубопроводі (приблизно 1 м від верхнього краю електронасосного агрегата). Структурна схема баштової водонасосної установки
як об’єкта автоматизації зображено на рис. 2.1.9.
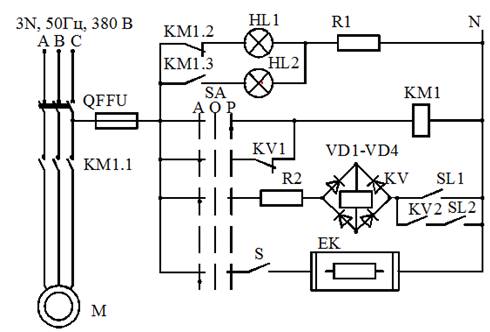
На рис. 2.1.10
зображено принципову електричну схему керування баштовою водонасосною
установкою за допомогою станції керування. Вона дозволяє в ручному й
автоматичному режимах запускати і зупиняти електронасос, захищає
електродвигун від перевантажень і коротких замикань за допомогою
автоматичного вимикача QF, сигналізує за допомогою сигнальних ламп про
ввімкнений і вимкнений стан насоса. Ручне керування
електронасосом
здійснюють перемиканням перемикача SА в положення «Р»,
а вимкнення – перемиканням перемикача SА в положення «О». Автоматичний режим
керування задають
перемиканням перемикача SА в положення «А». Якщо у башті
немає води, то контакти (електроди) датчика верхнього SL1 і нижнього SL2 рівня розімкнуті.
Отже, контакти реле КV1 в ланцюзі котушки магнітного пускача КМ замкнуті. Магнітний
пускач спрацьовує і вмикає електронасос М.
По мірі
накопичення води у башті перекриваються водою спочатку контакти SL2 нижнього рівня, а потім SL1 верхнього рівня,
і реле КV через воду отримує живлення. Контактами КV1 розривається
ланцюг живлення магнітного пускача КМ,
і електронасос вимикається. Реле КV залишається ввімкненим через контакти КV2, SL1 і SL2. Воно вимкнеться лише тоді, коли вода розімкне не
тільки верхні контакти, але і нижні. У цьому випадку контакти КV1 у ланцюзі
магнітного пускача КМ викликають
повторне ввімкнення електронасоса М.
Вимкнений стан
насоса визначають за зеленою лампою НL1, а ввімкнений – за червоною лампою НL2. На холодний період року вимикачем S вмикається
електрообігрівач ЕК датчика, що
запобігає зледенінню і вмерзанню електродів датчика рівня води в лід. Реле КV вибрано постійного струму, тому що обмотка реле
змінного струму за розімкнутого магнітопроводу могла б перегоріти під час
повільного заповнення водою верхнього проміжку датчиків рівня. Це може
відбутися внаслідок того, що струм в обмотці реле змінного струму в даному
випадку може наростати повільно до значення струму спрацьовування, що у
кілька разів більше його номінального струму, коли магнітопровід цього реле
замкнутий. Опір R2 вибирають таким,
щоб за фазної напруги мережі 220 В у колі електродних датчиків було безпечне значення
напруги. Вода електропровідна та за значних значень напруги можливе ураження
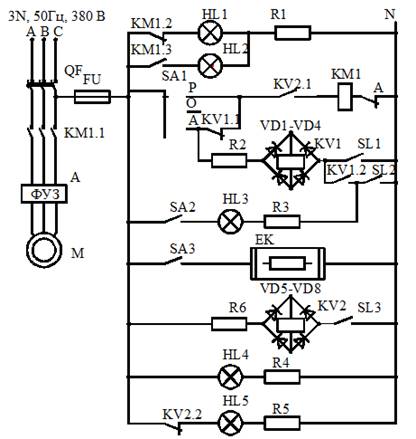
тварин та людей електричним струмом. Розглянемо електричну схему автоматизованої роботи
заглибного насоса з використанням датчика рівнів у баку
водонапірної башти і датчика сухого ходу в свердловині біля насоса (рис.
2.1.11.). У нормальних
умовах роботи заглибний насос знаходиться у воді, контакти датчика сухого
ходу SL3 замкнуті, реле КV2 увімкнено, його замикаючі контакти КV2.1 у ланцюзі котушки магнітного пускача КМ
замкнуті, сигнальна лампа НL4 сигналізує про наявність води в зоні насоса.
Режим роботи схеми задасться перемикачем SА1. Установлюючи його в положення А (автоматичне) і вмикаючі автомат
QF подається напруга на електричну схему керування. Якщо
рівень води в напірному баку знаходиться нижче нижнього рівня, то контакти SL1 і SL2 у схемі
розімкнуті, реле КV1 знеструмлено і його контакти КV1.1 у ланцюзі котушки магнітного пускача КМ1 замкнуті. У цьому
випадку магнітний пускач увімкнеться і ввімкне електродвигун насоса,
одночасно з цим згасне сигнальна лампа НL1 і загориться НL2. Насос буде подавати воду в напірний бак. Рівень води в
баку буде підніматися. Коли вода заповнить проміжок простору між
електродом нижнього рівня і корпусом датчика, підключеним до нульового
заземленого проводу, контакти SL2 замкнуться, але реле КV1 не ввімкнеться, тому що його контакти КV1.2, ввімкнені
послідовно з контактами SL2, розімкнуті. Коли вода досягне електрода верхнього рівня датчика,
контакти SL1 замкнуться, реле
КV1 увімкнеться і, розімкнувши свої контакти КV1.1 у ланцюзі котушки
магнітного пускача КМ1, відключить останній, замкнувши замикаючі
контакти КV1.2, стане на самопідживлення через нижні контакти датчика SL2. Електродвигун насоса вимкнеться, згасне сигнальна лампа НL2 і загориться НL1. Повторне ввімкнення електродвигуна насоса відбудеться під час зниження
рівня води до положення, коли розімкнуться контакти SL2 і реле КV1 знеструмиться. У
випадку аварійного зниження рівня води в зоні заглибного насоса нижче припустимого положення,
коли вода вийде з проміжку датчика сухого ходу і струм між електродом датчика
сухого ходу і корпусом датчика (напірного трубопроводу) припиниться, що
відповідає в електричній схемі розмиканню контактів датчика сухого ходу SLЗ, реле КV2 знеструмиться і розімкне контакти КV2.1 у ланцюзі котушки магнітного пускача КМ1, що вимкне
електродвигун заглибного насоса. Лампа НL4 згасне, а НL5 загориться, сигналізуючи про аварійне зниження рівня води в свердловині
чи в колодязі.
Для захисту електродвигуна заглибного
насоса від перевантажень використаний пристрій ФУЗ-М, що більш надійно
захищає електродвигун заглибного насоса як від перевантажень, так і від
неповнофазних режимів роботи. Вимикачем SА2 можна включати сигнальну лампу НL3 для контролю рівня води в напірному баку. Якщо
лампа НLЗ не горить, то насос не вмикається, або він ввімкнений, але не подає
воду, тому що подача насоса менша витрати споживачів у цей час.
На жаль, промисловість не випускає
спеціалізованих надійних датчиків тиску, що задовольняли б вимогам з
регулювання роботи баштових насосних установок зі зміною регульованого напору
(висоти між верхнім і нижнім рівнем води в баку) у межах від 0,5 до
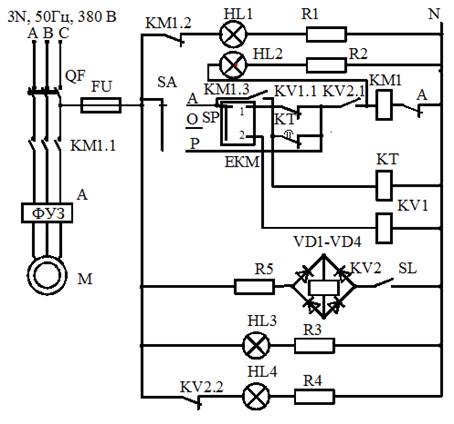
Принципову електричну схему керування електронасосним агрегатом
за тиском води в напірному трубопроводі зображено на рис. 2.1.13. Згідно зі
схемою за допомогою автоматичного вимикача QF подається напруга на щит керування, який також
забезпечує захист електродвигуна від коротких замикань і перевантажень. Про подачу
напруги на щит керування та вимкнений стан електронасоса сигналізує лампа НL1. Режим керування
установкою встановлюється перемикачем SA. За наявності в свердловині води в зоні заглибного
насоса контакти датчика сухого ходу SL, будуть замкненні, а реле КV2 буде тримати в
замкнутому стані свої контакти KV2.1. При цьому коло
котушки магнітного пускача КМ1
готове до роботи. В автоматичному режимі під час зменшення тиску, коли вода з бака витрачається споживачами під
час вимкненого насоса, рухливий стрілочний контакт манометра SР буде переміщатися до нерухомого контакту 1, що
відповідає тиску включення насоса Р1, і за його торкання магнітний
пускач КМ1 увімкне електродвигун
заглибного насоса і своїми замикаючими контактами КМ1.3 стане на самоблокування. Про роботу
насосного агрегату сигналізуватиме лампа HL2. Під час ввімкнення електронасосного агрегату в напірному
трубопроводі виникає короткочасне підвищення тиску. У цьому випадку рухливий
контакт манометра SР може торкнутися
контакту 2, реле КV1 може короткочасно розімкнути свої контакти в ланцюзі
котушки пускача КМ1, але пускач не
вимкнеться, тому що живлення його котушки буде здійснюватися через контакти
реле часу КТ. Після розбігу
електронасосного агрегату і стабілізації тиску реле часу розімкне свої
контакти КТ. Під час підйому води в
напірному баку до установленого верхнього рівня, що відповідає тиску
вимкнення Р2, рухливий
контакт манометра SР торкнеться
контакту 2. При цьому отримає живлення котушка реле КV1. Розмикаючи свої контакти
КV1.1, вимкне магнітний
пускач КМ1.1 електродвигуна насоса.
Внаслідок розбору води рівень її в напірному баку буде знову знижуватися,
тиск зменшиться і контакт SР знову торкнеться контакту 1. Робота схеми повториться. Під час ручного керування електронасосом перемикач SA необхідно
перевести з положення «О» в «Р» для ввімкнення електромагнітного
пускача насоса КМ. Для погашення короткочасних підвищень тиску, що діють на електроконтактний манометр SР у момент ввімкнення
заглибного насоса, на відгалужені до манометра встановлюють 1 чи 2 круглі
пластинки з малими отворами, що демпфірують. Цієї мети можна досягти за
допомогою вентиля, установленого на відгалуженні до манометра, ступінь
відкриття встановлюється такий, під час якого не виникає кидка тиску в
манометрі під час увімкнення насоса. У цих випадках реле часу КТ у схемі не потрібно.
Розвиток систем керування
баштовими водонасосними установками вимагає впровадження ефективних та
надійних засобів керування і захисту електронасосного агрегату. Так в
релейно-контактних схемах керування, для захисту електродвигуна насоса
замість автоматичних вимикачів і теплових струмових реле використовують
пристрої фазочутливого захисту ФУЗ.
На заміну релейно-контактним станціям керування
водонасосними установками з заглибним електронасосним агрегатом
використовують безконтактні станції. Вони дорожчі, але подорожчання
окуповується збільшенням терміну служби і надійності роботи як самої системи
керування, так і електродвигуна. Серед
найрозповсюдженіших це станції керування «Каскад» та «УСУЗ» (рис. 2.1.14).
·
автоматичний пуск і зупинка електронасоса в режимі дренажу і водопідйому залежно
від рівня води в свердловині чи в водонапірній башті; ·
автоматичний пуск електронасоса в режимі водопідйому залежно від тиску
стовпа води водонапірної башти й автоматичну зупинку електронасоса в цьому
режимі через час не більше 90 хв; ·
місцевий пуск і зупинка електронасоса; ·
дистанційний пуск і зупинка електронасоса; ·
селективність пуску електронасоса з регульованою витримкою часу. Нижня
межа часу 2с ±2с, верхня межа менша 30 с. Селективність забезпечується в
місцевому режимі і режимі автоматичного керування за рівнем; ·
вимкнення електронасоса під час перевантажень, коротких замикань і
неповнофазного режиму; · автоматичне вимкнення електронасоса під час зниження
води в свердловині нижче контрольованого значення за час не більше 0,5 с для
пристрою потужністю 4,5 кВт і вище; ·
вимкнення автоматичного повторного запуску електронасоса після
спрацьовування будь-якого виду захисту; ·
світлову сигналізацію з розшифровкою
аварійного вимкнення електронасоса (крім вимкнення під час коротких замикань
і віимкнення при неповнофазному режимі); ·
контроль навантаження в одній з фаз двигуна; ·
можливість передачі аварійного сигналу за межі пристрою; ·
самозапуск електронасоса під час короткочасного
зникнення і подальшої появи напруги з регульованою витримкою часу у місцевому режимі і режимі автоматичного керування за
рівнем.
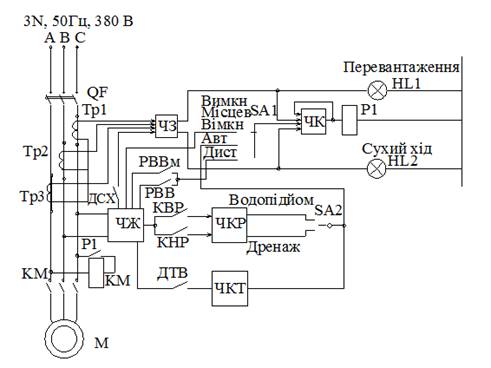
Принцип
роботи пристрою «Каскад» досить чітко пояснює функціональна схема (рис.
2.1.15). Режим керування пристроєм «Каскад» місцевий,
автоматичний чи дистанційний задається перемикачем SА1. Автоматичне
керування за рівнем води у водонапірній башті управління електронасосом
виконується датчиками КВР, КНР
(відповідно контакти датчика верхнього і нижнього рівня) під час подачі
відповідного сигналу в чарунку ЧКР, яка видає сигнал про вмикання чи
вимикання до вихідного вузла ЧУ. З
витримкою часу (можна встановити від 2 до 30 с) спрацьовує реле Р1 і вмикає електромагнітний пускач КМ. Для
реалізації режиму «Дренаж» перемикач SА2 встановлюють у
відповідне положення (в ящиках, які не мають тумблера «Водопідйом» і «Дренаж»
ці режими можна встановити перемичками на платі між точками 78–79 і 72–73 для режиму «Водопідйом» або між точками 72–78 і 73–79 для
режиму «Дренаж»). Для режиму «Дренаж» датчики рівня
встановлюють у каналі. Алгоритм керування протилежний режиму «Водопідйом» –
насос вмикається за високого рівня води у каналі і вимикається за низького.
У режим
роботи за тиском пристрій «Каскад» можна перевести, замінивши
чарунку ЧКР чарункою ЧКТ в ящику керування ЯНН 5100. Ящики
модифікацій ЯГ 5102, ЯЛ5102, ЯЛ 5101 мають окреме виконання для режимів
керування за рівнем чи тиском. Під час керування за тиском води у напірному
трубопроводі, якщо рівень води у водонапірній башті знижується то зменшується
статичний тиск водяного стовпа у трубопроводі. Під час цього ДТВ замикає свій контакт, а чарунка ЧКТ видає сигнал, що запам’ятовується,
підсилюється і надходить до вихідного вузла. Вимикання насоса наступить через
певний час, що потрібний для заповнення бака водою (5; 14; 24; 33; 43; 52;
62; 71; 80; 90 хв). Указані витримки часу можна встановити за допомогою
перемички на роз’ємі «Час роботи насоса». Повторне вмикання насоса
здійснюється за командою реле тиску (електроконтактного манометра). Спеціальна
чарунка ЧЗ здійснює захист електродвигуна від перевантажень та
сухого ходу із світловою сигналізацією причини вимкнення – лампи
«Перевантаження» та «Сухий хід». Для електронасосних агрегатів потужністю до
4,5 кВт не передбачається контроль «сухого ходу», а тому відсутній датчик ДСХ і сигнальна лампа «Сухий хід».
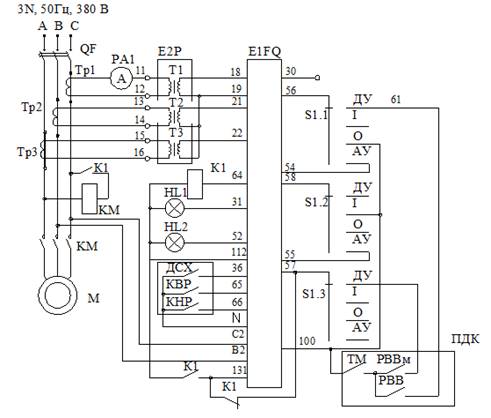
Затискач за номером 36 у цьому випадку з’єднується з нульовим N. Принципова електрична схема ящика керування
ЯГ5102 – 347Б1У2 (рис. 2.1.16) передбачає автоматичне управління за рівнем електронасоса
в режимі «Водопідйому». Також станція передбачає місцеве та дистанційне
керування електронасосом. Усі функції автоматичного управління, сигналізацію
і захист електродвигуна від аварійних режимів виконує блок управління Е1FQ. За
автоматичного управління в режимі «Водопідйому», якщо рівень води в
водонапірній башті знижується нижче встановленого рівня (контакт нижнього
рівня КНР розімкнутий) з блока
управління поступить сигнал на ввімкнення реле K1, яке своїм контактом
увімкне магнітний пускач КМ.
Електронасос почне працювати. Під час досягнення водою верхнього рівня КВР, сигнал поступає на вхід блока
управління, реле К1 вимкнеться і
своїми контактами вимкне пускач КМ,
електродвигун зупиниться. Дистанційне
управління забезпечується за допомогою реле виконання ввімкнення РВВм і реле виконання вимкнення РВВ, які в комплект поставки не
входять. Місцеве управління виконується установкою відповідного режиму
перемикачем S1. Захист
електронасоса від аварійних режимів виконується вузлом
захисту E2P блока управління.
Сигнал захисту електронасоса під час перевантажень, неповнофазного режиму,
коротких замикань в електродвигуні чи кабелі живлення формується в
трансформаторах струму Т1-Т3.
Захист електронасоса від перевантажень побудований за принципом часової
обернено залежної від струму характеристиці, тобто що більший струм
перевантаження, то менший струм спрацювання захисту. Під час перевантажень
струм, що протікає в первинній обмотці трансформатора, збільшується.
Відповідно збільшується величина сигналу, який поступає на вхід блока
управління. Досягнувши відповідного під час налагодження рівня спрацювання
захисту блок управління вимикає реле К1.
При цьому пускач КМ електронасоса
вимикається. Під час зниження рівня води в свердловині нижче контрольного
значення (контакту ДСХ) спрацьовує
захист від «сухого ходу». У пристрої передбачено дублюючий захист
електронасоса від перевантажень і коротких замикань, який виконаний за
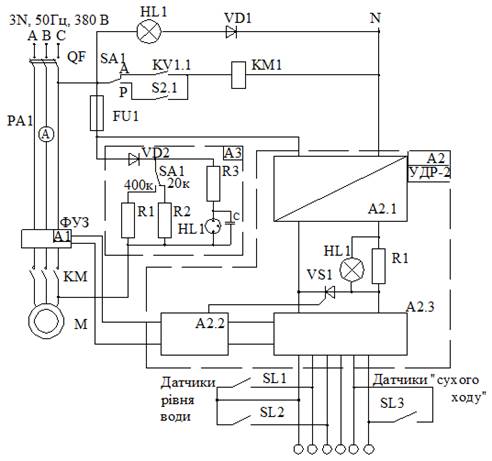
допомогою автоматичного вимикача QF1. Універсальна станція керування і
захисту «УСУЗ» призначена для автоматичного керування і
захисту електродвигунів заглибних насосних агрегатів потужністю 0,4–11 кВт, у
якій можуть використовуватися датчики будь-якого принципу (електродні датчики рівня, реле тиску, електроконтактний
манометр).
· блок А1 –
фазочутливий пристрій захисту ФУЗ-М; · блок А2 – універсальний
двопозиційний регулятор УДР-2, що складається з блоку живлення (А2.1), логічного елемента «АБО» (А2.2) і вузла керування (А2.3); · блок АЗ –
елементи контролю опору ізоляції.
До одного входу
блоку А2 можуть бути приєднанні електродний датчик рівня води, реле
тиску, електроконтактний манометр (один з приладів), а до іншого –
датчик «сухого ходу» (якщо він не встановлюється, то клеми 5-6 з’єднуються
перемичкою). За автоматичного режиму керування вмикають
автоматичний вимикач QF1. Тумблер SА1 ставиться в положення «А». Команди на вмикання і вимикання магнітного пускача КМ1 формує двохпозиційний регулятор УДР-2 (блок А2) за допомогою електродних датчиків рівня SL1, SL2 (реле тиску, чи
електроконтактного манометра). У
ручному режимі керування тумблер SА1 ставлять у положення
"Р", вмикають тумблер S2, що контактами S2.1 вмикають котушку
магнітного пускача КМ1 у мережу. При цьому захист електродвигуна не працює. У
ручний режим роботи установку короткочасно може переводити електромонтер,
який обслуговує її. Станція керування
може працювати при несправних або відсутності датчиків рівня води в башті чи
датчиків тиску. Для цього необхідно тумблер SА1 встановити в
режим «А», тумблер S2 у положення «Вкл.»,
який розташований на бічній стінці шафи. При цьому забезпечуються всі захисти
двигуна. Під час перевантаження, неповнофазних режимів і
коротких замикань виробляється сигнал у блоці А1.
Контакти вихідного реле блоку захисту спрацьовують і своїми контактами,
подають сигнал у блок А2. Двигун з визначеною витримкою часу відключається від мережі. Контроль опору ізоляції обмоток заглибного
електродвигуна здійснюється
блоком АЗ у періоди, коли двигун
відключений від мережі. При цьому струм протікає по ланцюгу: L3.1 – FU1 – VD1 – R1 (чи R2) – SА1 – опір ізоляції
двигуна – N. Під час зниження опору ізоляції на резисторі R1 (R2) зростає спадання
напруги до величини запалювання неонової лампи НL1. Спочатку
перемикачем SА1 підключається
резистор R1. Загоряння лампи НL1 сигналізує про
зниження опору ізоляції. Перемикач SА1 переводиться на
резистор R2, якщо лампа НL1 гасне то агрегат
експлуатувати допускається. Під час запалювання лампи (увімкнений R2) двигун необхідно ремонтувати.
• автоматичний
режим роботи водопідйом, або дренаж від датчиків рівня або датчиків тиску; • ручне управління
за допомогою кнопок пуск/стоп на лицьовій панелі станції; • контроль і
індикацію робочого струму електродвигуна; • контроль і
індикацію аварійного стану (відображення коду аварії); • оперативна
настройка захисту електродвигуна; • автоматичне
скидання аварії і повторний пуск насосного агрегату, з витримкою за часом.
Станція
«Каскад-К1М» оснащена оригінальним приладом захисту і управління
електродвигуна на основі мікропроцесора – «МПЗК-50». Мікропроцесорний прилад
захисту і контролю «МПЗК-50» призначений для автоматичного керування і
захисту відцентрових заглибних електронасосних агрегатів у режимі водопідйому
чи дренажу.
·
виникнення неприпустимих перевантажень у момент пуску і робочому режимі; · обриву однієї або двох фаз; · асиметрії
напруги мережі живлення; · холостого
ходу електродвигуна; · короткого замикання в колі електродвигуна; · неприпустимо низького дебету води в свердловині. Застосування
приладу «МПЗК-50» дозволяє крім того проводити контроль й індикацію робочого
струму електродвигуна; контроль і індикацію аварійного стану.
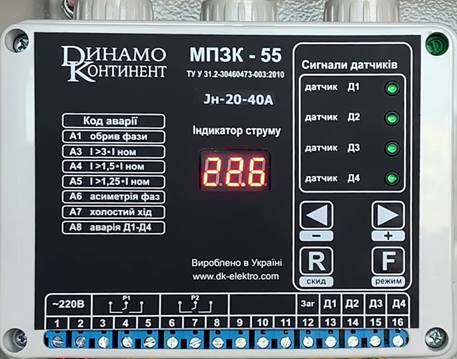
Прилад «МПЗК-50» (рис. 2.1.19) – конструктивно виконаний
у технополімерному корпусі, в середині якого розміщені елементи контролю,
індикації й комутації. На кришці приладу розташована лицьова панель із
цифровим індикатором струму, світлодіодні індикатори режимів роботи, кнопки
керування, органи настроювання. Індикатор струму відображає: величину робочого струму або струм настроювання, А;
код аварійного режиму, під час якого спрацював захист. Індикатори режиму
роботи показують стан обраного режиму: «Ручний»; «Автоматичний – водопідйом»
(датчики рівня/датчик тиску); «Автоматичний – дренаж». Кнопки керування: «Уставка» – переводить режим роботи
індикатора струму з робочого режиму, у режим
настроювання параметрів захисту; «Скидання» – призначені для вимкнення режиму
«Аварія» і відновлення режиму «Робота». Під час натискання кнопки «Скидання»
раніше задані параметри режиму роботи й параметри захисту зберігаються;
«Режим» – призначений для вибору необхідного режиму роботи. Під час кожного
натискання кнопки «Режим» відбувається зміна одного режиму на наступний. Кожному
режиму відповідає свій світлодіодний індикатор. Для оперативного аналізу
причини виникнення аварії в «МПЗК-50» використовуються коди аварій.
• А1 – обрив однієї з
живильних фаз; • А2 – перекіс фаз; • А3 – значення струму споживаного електродвигуном перевищує номінальне
значення в 1,25 раза (25% – перевантаження); • А4 – значення струму споживаного електродвигуном перевищує номінальне значення
в 1,5 разу (50% – перевантаження); • А5 – значення струму споживаного електродвигуном перевищує номінальне
значення в 3 і більше рази; • А6 – холостий хід (електродвигун без навантаження); • А7 – низький дебет води в свердловині – «сухий хід». • Схему підключень електронасосного агрегату з приладом
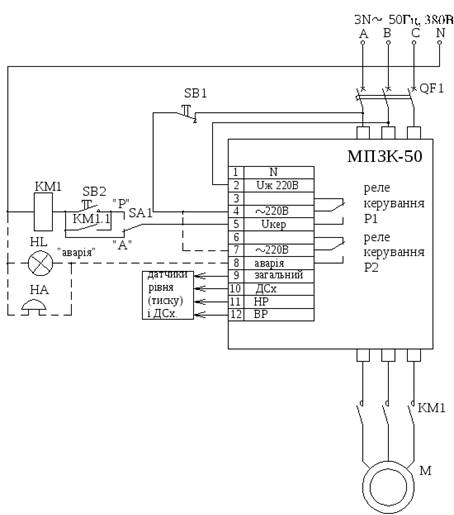
«МПЗК-50» зображена на рис. 2.1.20. Підготовка установки до роботи
здійснюється автоматичним вимикачем QF1. Робота в ручному режимі: Натисканням кнопки «Режим», встановлюється режим роботи
«Ручний», при цьому буде світитись світлодіод «Ручний». За обраного режиму
«Ручний» керування електродвигуном здійснюється оператором від кнопкового
поста SB1 «Пуск», SB2 «Стоп». Робота в автоматичному режимі: За увімкненого електродвигуна вибрати заданий режим
роботи з необхідними датчиками (при цьому буде світитися відповідний
світлодіод).
В автоматичному режимі керування з датчиками рівня за відсутності води в резервуарі, під час подачі
електроживлення відбувається автоматичне увімкнення електродвигуна насоса
шляхом замикання контактів 4–5 реле керування Р1. За досягнення рівня води в резервуарі до датчика верхнього
рівня ВР відбувається автоматичне вимикання електродвигуна насоса шляхом
розмикання контактів 4–5 реле керування Р1.
За зниження рівня води в резервуарі нижче датчика нижнього рівня НР
відбувається автоматичне ввімкнення електродвигуна насоса для подачі води в
резервуар і цикл повторюється. Датчики ВР
і НР (верхнього і нижнього рівнів)
установлюються залежно від технічних характеристик резервуара. Робота в автоматичному режимі керування з датчиками тиску у випадку відсутності тиску стовпа води на датчик
тиску, під час подачі електроживлення відбувається автоматичне увімкнення
електродвигуна насоса шляхом замикання контактів 4–5 реле керування Р1. Під час замикання рухомого
контакту електроконтактного манометра з контактом верхньої уставки «ВР»
відбувається автоматичне вимикання електродвигуна насоса шляхом розмикання
контактів 4–5 реле керування Р1.
Під час замикання рухомого контакту електроконтактного манометра з контактом
нижньої уставки "НР" відбувається ввімкнення електродвигуна насоса,
і цикл повторюється. Якщо у вихідному стані рухомий контакт «ЕКМ» перебуває між контактами «ВР» і «НР», то під час подачі живлення електродвигун насоса не
увімкнеться. Увімкнення електродвигуна насоса відбудеться по замиканню
рухливого контакту з контактом датчика «НР». Робота в автоматичному режимі керування під час дренажу з датчиками рівня прилад «МПЗК-50» необхідно
установити на режим роботи «Автоматичний – дренаж». Під час досягнення рівня води
в каналі до датчика «ВР» відбувається автоматичне ввімкнення електродвигуна
насоса. Під час падіння рівня води в каналі нижче датчика «НР» відбувається автоматичне
вимикання електродвигуна насоса. Захист електродвигуна глибинного насоса від неприпустимо низького рівня води в свердловинні
виконується датчиком «сухого ходу» – «ДСх».
Робочому стану заглибного насоса відповідає замкнутий стан датчика сухого
ходу «ДСх» відносно «Загального»
провідника (датчик «ДСх» перебуває
під водою). Аварійному стану заглибного насоса відповідає розімкнутий стан
датчика сухого ходу «ДСх» відносно
«Загального» провідника (датчик «ДСх»
перебуває вище рівня води). У випадку
коли датчик сухого ходу «ДСх»
не використовується, необхідно
встановити перемичку між виводами 9 і 10 клемного гвинтового затискача
«МПЗК-50». Під час виникнення
аварійної ситуації «МПЗК-50» розімкне контакти 4–5, реле керування Р1, кола керування електродвигуна і на
індикаторі струму зафіксує код аварії. За кодом аварії оперативно можна
визначити причину вимкнення електродвигуна. Для поновлення роботи
електродвигуна необхідно усунути причину виникнення аварії і натиснути кнопку
«Скидання». Для дистанційного контролю роботи й аварії
електродвигуна можна використати
контакти реле керування Р2. У
робочому режимі «МПЗК-50», контакти 6–7 замкнуті, а 7–8 розімкнуті. При
виникненні аварії розмикаються контакти 6–7 і замикаються контакти 7–8.
· автоматичне заповнення резервуару до заданого рівня; ·
автоматичне осушення резервуару до заданого рівня; ·
захист заглибного насоса від «сухого» ходу. Пристрій працює з
різними за електропровідністю рідинами: водопровідною, забрудненою водою,
молоком і харчовими продуктами (слабокислотними, лужними та ін.).
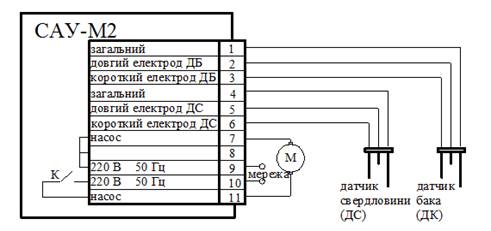
·
датчик рівня рідини в баку (заповнюваної
місткості); ·
датчик рівня рідини в свердловині (місткості, призначеної для відбору
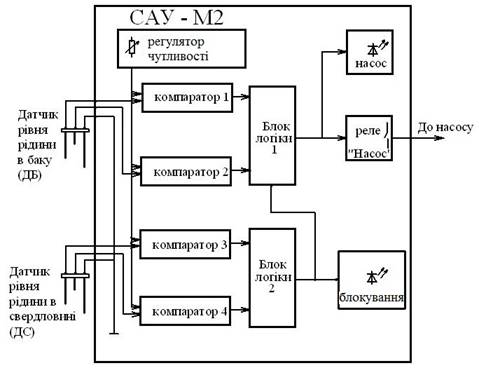
рідини). Компаратори 1–4
сприймають сигнал від датчиків і порівнюють значення вхідного сигналу з
заданим значенням і видають (відповідно до умов блоку логіки 1) сигнал на
увімкнення або вимкнення реле «НАСОС», до якого підключений електропривод
насоса.
Реле «НАСОС»
вмикається під час осушення електрода нижнього рівня (тобто довгого
електрода) датчика бака або вимикається під час затоплення електрода
верхнього рівня (тобто короткого електрода) датчика бака. Під час
використання САУ-М2 для осушення резервуару до входу
приладу підключається тільки один датчик – рівня рідини в свердловині
(місткості, призначеної для відбору рідини). Реле «НАСОС» вимикається під час
осушення довгого електрода (тобто електрода нижнього рівня) датчика. Прилад САУ-М2 має регулятор чутливості, що дозволяє змінювати рівень опорних сигналів компараторів.
Обертанням ручки регулятора на лицьовій панелі прилад легко настроюється для
роботи з різними за електропровідністю рідинами. Під час осушення
довгого електрода (тобто електрода нижнього рівня) датчика свердловини реле
«НАСОС» вимикається, що призводить до блокування роботи насоса. На лицьовій
панелі приладу при цьому включається світло-діод «блокування».
На лицьовій панелі приладу
розташовані 3 світлодіодних індикатори, що сигналізують постійним свіченням
про наявність живлення на приладі, увімкнення електроприводу насоса та
блокування роботи насоса під час осушення датчика рівня рідини в свердловині. Ручка
потенціометра-регулятора чутливості – служить для первинної наладки приладу
залежно від електропровідних властивостей рідини.
• Номінальна
напруга живлення приладу – 220 В частотою 50 Гц; • Допустимі
відхилення напруги живлення від номінального значення -15...+10 %; • Кількість
датчиків, що підключаються – два триелектродних; • Тип датчиків –
кондуктометричний; •Кількість
вбудованих вихідних реле – 1; • Макс, допустимий
струм, комутований контактами вбудованого реле – 8 А
при 220 В 50 Гц;
• Напруга на
електродах датчика рівня – не більше 12 В пост,
струму; • Опір рідини, що викликає спрацьовування датчика – не більш 500 кОм; • Тип корпусу –
настінний Н; • Габаритні
розміри корпусу – 130×105×65 мм; • Ступінь захисту
корпусу – 1Р44; • Умови
експлуатації приладу: температура навколишнього повітря –1+50°С; атмосферний тиск –
86–106,7 кПа; • Відносна
вогкість повітря (при +35 °С) не більше 80 %. Автоматизація
водопостачання вважається в технічному розвитку найважливішим аспектом. Це
знайшло свою актуальність не тільки на великих станціях водопостачання, але і
на малих водо насосних установках, адже насоси з приладами автоматики
створюють комфортну роботу будь-яких водопроводів. Для організації такого
водопроводу необхідно розрахувати свердловинний насос, підібрати за
результатами розрахунку перетворювач частоти та інше додаткове обладнання. Також застосовують перетворювач, коли потрібно в певний
часовий проміжок здійснити у електричного двигуна безступінчасте регулювання
його потужності. Наприклад, коли споживання води здійснюється по черзі, це
значить, щоб підтримувати потрібний тиск води на виході з насоса і в цілях
економії електричної енергії можна здійснювати шляхом зміни частоти.
У схемах водопостачання з
частотними перетворювачами не потрібно великий гідроакумулятор для роботи. Досить
маленького гідроакумулятора, навіть за продуктивності насоса 4 м3
на годину. В цьому випадку гідроакумулятор не може виступати як накопичувач,
він тільки гасить гідроудари. Ці гідроудари дуже незначні, тому що частотний
перетворювач має плавний пуск. У момент, коли
стартує насос, він подає на нього частоту всього 25 Гц, тому насос
запускається дуже повільно, при цьому споживає мало енергії. Перетворювач
частоти запрограмований таким чином, що він буде підтримувати постійно 3 атмосфери
в системі водопостачання, незалежно від того, один кран відкритий або чотири.
Під час відкриття крана з водою насос починає запускатися. Відбувається це
плавно, упродовж декількох секунд. Насос починає набирати обертів, які
достатні на низькому рівні. Якщо ми відкриваємо інші крани, насос починає
збільшувати свої оберти, частота мережі буде змінюватися в бік збільшення для
того, щоб компенсувати втрату тиску на кількох кранах.
Споживання в цьому
випадку буде дуже комфортним. Тиск не змінюватиметься незалежно від того, скільки
кранів відкрито. Під час закриття кранів частота обертання на двигуні починає
падати, але тиск при цьому залишиться незмінним. У нашому випадку
запрограмовано тиск на 3 атмосфери. Незалежно скільки кранів відкрито цей
тиск буде постійним. Закриваємо всі крани, і бачимо, що відбувається
вимкнення насоса, уповільнення обертання двигуна. Через
кілька секунд насос вимикається, набравши 3 атмосфери.
Не потрібен великий гідроакумулятор. Це економія
простору і грошових коштів. Частотний перетворювач
робить водопостачання комфортним. Ви отримуєте постійний тиск в системі
незалежно від того, скільки кранів ви відкрили. Економія
електроенергії. Перетворювач частоти коштує не дешево, але економія від його
використання окупається через два роки. Перетворювач
захищає насос. Якщо в системі закінчиться вода, то перетворювач відключиться,
тим самим запобіжить згоряння насоса. Якщо в насосі заклинять робочі колеса,
він також вимкнеться. Якщо в системі є витоки, він буде кілька разів
перезапускатися, потім відключиться, тому що наявність витоків може пошкодити
насос. У перетворювачів
частоти передбачений захист від перенапруги. Якщо напруга висока, він просто
не запуститься. За дуже низької напруги перетворювач теж не запустить насос,
тому що двигун може вийти з ладу. Також вони мають захист по струму. Часто
буває, що на вал двигуна можуть намотатися сторонні предмети, або потрапити
пісок, який буде підклинювати робочі колеса. У цьому випадку струм в обмотці
двигуна буде рости, але тепловий захист ще не спрацює. Перетворювач також
вимкне насос, щоб можна було провести чистку насоса. Звичайні засоби
захисту не рятують від підвищеного струму, тому що тепловий захист
розраховано на максимальний струм. А коли номінальний струм підвищується на
20%, це непомітно, але відбувається повільне спрацювання двигуна насоса.
Підвищений струм призводить до розшарування обмоток двигуна, лаку на них,
поступово обмотка згорає. Споживач помітить цей процес тільки через 2–3
місяці. Як підібрати частотний перетворювач? Під час вибору
частотного перетворювача в першу чергу технічні дані
мають поєднуватися з потужністю і типом двигуна насоса, з яким він буде
працювати. Потрібно врахувати потрібний інтервал регулювання, точність
настроювання й підтримки моменту обертання на двигуні. Особливість
конструкції перетворювача, його габарити, управління, конфігурація також
впливають на вибір. Найчастіше в свердловинах монтують асинхронні двигуни. ЧП
до нього вибирається виходячи з потужності, щоб її величина була більшою, ніж
у двигуна. Якщо в мережі два насоси, то краще вибрати ЧП з векторним
керуванням, що дає можливість підтримувати обороти двигуна під час змінних
навантаженнях, функціонувати без зниження оборотів. Такі пристрої точніше
контролюють момент двигуна і швидкість роботи. ЧП поділяються на
класи за напругою: для побутових потреб на 220 В, промислові до 500 В,
високовольтні до 6000 В. Також пристрої мають різну ступінь захисту, тип
управління. Великі виробники випускають інверторні блоки насосів, в яких
частотники прив'язані до моделей насосів.
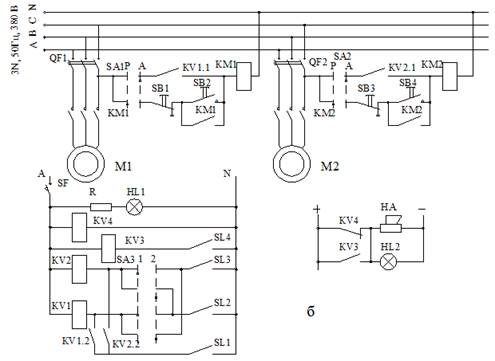
Розглянемо роботу водонасосної
установки з перетворювачем частоти, яку зображено на рис. 2.1.25. Наведена
схема автоматизації водонасосної установки містить електронасосний агрегат 7
заглибного типу, який розміщений в свердловині 6. Також там розміщений датчик
«сухого ходу» 4. У напірному трубопроводі 2 встановлено зворотний клапан 5. Насосна установка
має напірний бак 1 (водонапірна вежа або повітряно-водяний котел) і датчики
тиску (або рівня) 3, причому датчик 3 реагує на верхній тиск (рівень) в баку і на нижній тиск (рівень) в баку. Управління
насосною станцією забезпечує блок управління 8. Управління насосною установкою
відбувається наступним чином. Припустимо, що насосний агрегат вимкнений, а тиск в напірному баку
зменшується і стає нижче Рmin. У цьому випадку від датчика надходить сигнал на
ввімкнення електронасоса. Відбувається його запуск шляхом плавного збільшення
частоти f струму, який
живить електродвигун насосного агрегату. Коли частота
обертання насосного агрегату досягне заданого значення, насос вийде на
робочий режим. Програмуванням режиму роботи частотного перетворювача можна
забезпечити потрібну інтенсивність розбігу насоса, його плавний пуск і
зупинку. Застосування
регульованого електроприводу насоса дозволяє реалізувати прямоточні системи
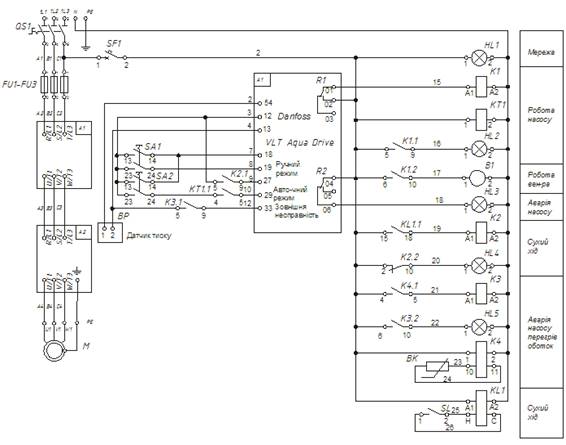
водопостачання з автоматичним підтриманням тиску у водопровідній мережі. Станція
управління, що забезпечує плавний пуск і зупинку електронасоса та автоматичну
підтримку тиску в трубопроводі, містить перетворювач частоти А1, датчик тиску
ВР, реле сухого ходу KL1, мережевий фільтр А2, схему управління і допоміжні
елементи, що підвищують надійність роботи обладнання (рис. 2.1.27).
- плавний пуск і гальмування насоса; - автоматичне
керування за рівнем або тиском; - захист від
«сухого ходу»; - автоматичне вимкнення
електронасоса при неповнофазному режимі, неприпустимому зниженні напруги, під
час аварії у водопровідній мережі; - захист від
перенапруг на вході перетворювача частоти А1; - сигналізацію про
ввімкнення і вимкнення насоса, а також під час аварійних режимів; - підтримання
мікроклімату в шафі управління за негативних температур. Плавний пуск і плавне гальмування насоса здійснюють за допомогою перетворювача частоти Danfoss типу VLT® AQUA Drive FC202 (рис. 2.1.26). Мережевий фільтр МСС 107 Danfoss знижує пульсацію в колі постійного струму, тим самим
подовжує термін служби частотного перетворювача, знижує середньоквадратичне
значення фазного струму, тобто підвищує коефіцієнт потужності, підвищує
ступінь електромагнітної сумісності та стійкість до перепадів напруги
живлення.
Електродвигун
насоса підключається до виводів U, V і W перетворювача частоти. Під час вмикання
поворотної кнопки SА1 здійснюється
ручний режим і напруга подається на входи 18 і 19 перетворювача частоти,
забезпечуючи плавний пуск електронасоса за програмою, заданою під час
налаштування частотного перетворювача. В автоматичному режимі потрібно ввімкнути поворотну кнопку SА2. При цьому режимі вмикання здійснюється за заданою
програмою за допомогою реле часу КТ1,
яке має контакт КТ1.1. Відповідно
до програми контакт реле часу КТ1.1
замикається і подає напругу на вхід 29 перетворювача частоти, забезпечуючи
роботу насоса відповідно до програми заданої під час налаштування частотного
перетворювача. Якщо не потрібно вмикання установки за програмою, то реле часу
не встановлюється і напруга з перемикача SА2 поступає зразу на
вхід 29 перетворювача. Датчик тиску ВР з аналоговим виходом 4–20 мА
підключений до аналогових входів частотного перетворювача (контакти 54, 13,
27 і 33), забезпечує стабілізацію тиску води в системі. Функціонування
системи стабілізації забезпечується регулятором перетворювача частоти.
Необхідний тиск задається з пульта управління частотного перетворювача.
Рис. 2.1.27. Принципова електрична
схема автоматизації заглибного насоса з частотним
перетворювачем При «сухому ході» насоса реле КL1 отримує сигнал
від електродного датчика рівня SL. В разі відсутності води реле КL1 розмикає контакт
в колі котушки реле К2, а його
контакти К2.1 розмикаються в колі
частотного перетворювача на вході 27, що призводить до вимикання
перетворювача і відповідно насосної установки. Захист насоса від перевантажень здійснюється за допомогою регулятора К4, який має датчики температури, що
розміщуються в обмотках двигуна. Під час перегріву обмоток регулятор К4 замикає контакт К4.1 в колі котушки проміжного реле К3. Контакти реле К3.1 замикаються і подають сигнал на вхід 33, повідомляючи про
зовнішню несправність та вимикають перетворювач. Вентилятор В1 здійснює охолодження перетворювача
і вмикається контактами R2 частотного
перетворювача під час перевищення його температури вище допустимої. Сигнальні лампи здійснюють сигналізацію роботи перетворювача та
наявність аварійних режимів. Захист вхідних ланцюгів перетворювача частоти та
схеми керування від коротких замикань і перевантажень здійснюється
автоматичним вимикачем SF1. Ми розглянули керування водонасосної
установки з використанням частотного перетворювача, але їх застосування дуже
різноманітне в сільському господарстві.
- насоси – промислові
і побутові, заглибні і мережеві, на один насос і на цілі насосні станції,
головне щоб двигун підходив; - вентилятори – в
основному промислові, часто в складі автоматики управління кліматичним
устаткуванням; - конвеєри, норії
– наприклад, для регулювання швидкості подачі; - вантажопідйомні
пристрої – на приводах переміщення і підйому або опускання вантажів
мостового, козлового кранів; - приводи
верстатів – під час створення будь-яких типів нових, а також під час
модернізації або капітального ремонту старих верстатів; - компресори – для
полегшення пусків і контролю продуктивності поршневих, гвинтових,
відцентрових та інших видів компресорів; - шнеки,
екструдери – для регулювання продуктивності і створення автоматизованої
лінії; - млини –
наприклад, для регулювання швидкості подачі сировини на конвеєр, щоб не
перевантажувати наступний цикл, захист електродвигуна і зниження навантаження
на мережу під час пусків; - дробарки –
щокові, роторні, молоткові, конусні та ін. Наприклад, для синхронізації двох
двигунів обертають один вал приводу дробарки. Для відкачування
стічних, дренажних і господарсько-лекальних вод використовують низьконапірні
(8–95 м) високопродуктивні (16–9000 м3/год) каналізаційні
електронасоси. Каналізаційні насоси мають
низку відмінних рис. Такі насоси мають незабруднювальні одне трилопатеве
розширене робоче колесо, яке з'єднує насос з напірним трубопроводом. Звичайно ці
установки мають просту конструкцію, вони обладнані кнопковою станцією
дистанційного керування електронасосним агрегатом за допомогою магнітних
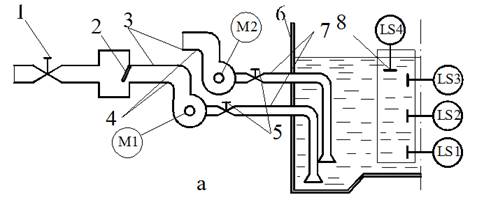
пускачів. Як приклад розглянемо систему автоматичного керування
двохагрегатною водовідливною насосною станцією (рис. 2.1.29). Вручну агрегати вмикають і вимикають
кнопками SB1...SB4, а в автоматичному режимі – за допомогою електродних датчиків рівня SL1...SL4. Засувки 1 і 5 з ручним приводом закривають під час
ремонту насосів. Під час роботи насосів вони відкриті. Зворотний потік рідини
через непрацюючий насос 4, та труби 3 і 7 запобігає клапан 2. Стічні води і
гнойова рідина збираються в резервуар 6. У міру
підвищення рівня рідини вони перемикнуть проміжки електродів нижнього рівня SL1, SL2 і загальний електрод 8 (заземлена труба). Спочатку від датчика SL2 вмикається один насос. Якщо приплив стічних вод більше, ніж
продуктивність насоса, то рівень стоків підвищується і датчиком SL3 вмикається другий електронасос.
Черговість вмикання агрегатів визначається перемикачем SA3. Наприклад, у положенні 1 перемикача SA3 спочатку від датчика SL2 спрацьовує реле KV1, що вмикає електродвигун M1 першого насоса, а потім від датчика SL3 – реле KV2 і другий електронасос М2. У положенні 2 перемикача черговість
вмикання насосів буде зворотною. Другими парами контактів реле KV1 і KV2 шунтують через
датчик SL1, ланцюга датчиків
SL2 і SL3. Завдяки цьому
шунтуванню відключення реле KV1 і KV2, а потім і
насосів під час зниження рівня стічної води відбудеться тільки тоді, коли розімкнеться
ланцюг датчика SL1 нижнього рівня. Якщо
продуктивність двох агрегатів виявляється менше припливу стічних вод, то від
підвищення рівня замикається ланцюг датчика SL4 і спрацьовує реле KV3, що включає аварійно-попереджувальну звукову НА і світлову HL2 сигналізації. Ця ж сигналізація спрацьовує від реле KV4 під час зникнення напруги живлення. Ланцюги аварійної сигналізації
одержують живлення від незалежного джерела. Зрошення передбачає поповнення запасів вологи
в не досить зволоженому ґрунті та створення сприятливих умов для кореневої
системи рослин. Використовуючи можливості зрошення, з’являються можливості
отримання високих та стабільних врожаїв.
Зрошення
включає регулювання водного режиму земель шляхом поверхневого зрошування чи
краплиного зрошування. У південних районах, де кількість атмосферних опадів недостатня
для вирощування високих врожаїв сільськогосподарських культур, застосовують
зрошення.
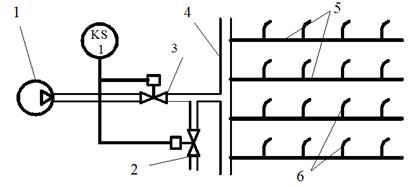
Схема
стаціонарної системи дощування з програмним керуванням представлена на рис. 2.1.31. Система складається з
насосної станції 1, магістрального напірного трубопроводу 4 і поливних трубопроводів
5 зі встановленими на них дощовими апаратами 6, кожний з яких підключений до трубопроводу через трипозиційний гідроклапан. Під час
подачі води в напірний трубопровід відкриваються гідроклапани дощувальних
апаратів першого ряду (найближчі до напірного трубопроводу). Через заданий час програмний пристрій КS1 формує короткочасний імпульс зниження тиску в
напірному трубопроводі за рахунок закриття напірного клапана 2 і відкриття
перепускного клапана 3. Кожен такий імпульс призводить до закриття гідроклапанів
діючого ряду дощувальних апаратів і відкривання наступного.
Перевага описаної системи – відсутність необхідності в спеціальних
каналах зв'язку на зрошуваній площі, недолік – можливість зміни норми поливу тільки від одного дощувального
апарату до іншого в строгій послідовності.
Краплинне зрошування – найекономічніший спосіб зволоження, під час якого
вода подається прямо в кореневий шар невеликими дозами через спеціальні
отвори (крапельниці), встановлювані через кожні 50–100 см на зволожувальних
трубопроводах.
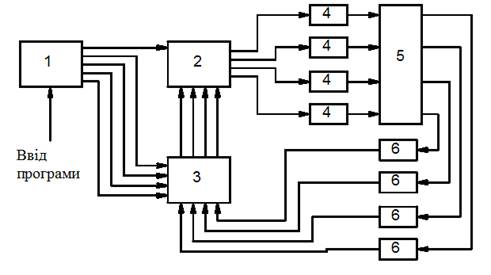
Систему автоматичного
управління краплинним зрошуванням зображено на рис. 2.1.33. Програма, що визначає
черговість і час зрошування ділянок, вводиться в блок завдання і
відпрацювання програми 1. Сигнал дозволу поливу ділянки поступає на блок
елементів 2 і логічний блок 3 порівняння, де порівнюються задане і дійсне
значення вологості, вимірювані вологомірами 6. За дефіциту вологості логічним
блоком 2 виробляється команда на управління відповідним виконавчим механізмом
4.
Про переваги та принцип
роботи краплиного зрошування можна дізнатися переглянувши відео. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||